
小天体表面探测器弹跳运动与路径规划
2022-10-14 09:38李朝玉
深空探测学报 2022年4期
王 棒,徐 瑞,李朝玉,高 越
(1.北京理工大学 宇航学院,北京 100081;2.深空自主导航与控制工业和信息化部重点实验室,北京 100081;3.航天恒星科技有限公司,北京 100081)
引言
近地小天体(Near-Earth Objects,NEO)包括近地小行星(Near-Earth Asteroids,NEA)和近地彗星(Near-Earth Comets,NEC),其轨道近日点小于1.3 AU[1]。实施小天体表面探测可加深对空间环境的认知,促进太阳系起源演化的研究;获取表面物化属性及形貌有助于推测该类天体的形成与演化;其内部蕴含的矿产资源可为探测器提供燃料、能源方面的支持;同时还可验证深空探测关键技术,因此实施小天体表面探测具有重要的科学与工程意义,对空间科学、行星科学、材料科学等领域的发展均有着促进作用。
以美国国家航空航天局(National Aeronautics and Space Administration,NASA)、日本宇宙航空研究开发机构(Japan Aerospace Exploration Agency,JAXA)和欧洲航天局(European Space Agency,ESA)为代表的航天机构已经实施了多项小天体探测任务。在这些任务中,有些探测器已经与小天体表面进行了接触或者向其投放了小型探测装置[2]。2001年,“近地小行星交会”(Near Earth Asteroid Rendezvous-shoemaker,NEAR)探测器以约1.5~1.8 m/s的速度成功着陆在小行星Eros 433上,实现了首次小行星表面着陆[3-4],在停止工作前一段时间收集了表面物质成份数据。2005年,Hayabusa探测器与小行星Itokawa 25143 实现了交会着陆,利用星上搭载的载荷对表面进行了近距离观测、现场物质分析及表面物质采集等任务,但其携带的小型着陆器“智慧女神”(Minerva)部署失败,并未着陆至表面[5]。2014年,“罗塞塔号”(Rosetta)探测器成为首个进入彗星轨道的探测器,而后释放“菲莱号”(Philae)着陆器,由于预设的锚定方案未能正常执行,导致Philae在彗星表面发生弹跳,落在裂缝阴影区中,最终因能源无法得到补充而停止工作[6-7]。2018年,“隼鸟2号”(Hayabusa 2)探测器采集了表面以及表面以下物质样本并成功向“龙宫”(Ryugu)小行星表面部署了小型漫游车[8],其获取的数据为小行星研究提供了科学依据。2020年,OSIRIS-REx探测器使用TAGSAM设备采集了小行星“贝努”(Bennu)表面的风化层颗粒[9],其采样头和机械手之间的万向头为小行星的复杂地形提供了自适应能力。
相较于飞越探测和环绕探测,表面探测无疑能够获得更准确的信息,而且采用表面探测器代替宇航员进行着陆探测及取样分析也将会大大降低探测成本和探测风险。因此,探测器表面移动成为小天体探测的关键技术之一。但小天体引力微弱,表面多碎石、沟槽,这些特性使探测器的行走与控制极其复杂,传统的轮式行进方式适用性较差。针对这一问题,研究人员提出将跳跃移动应用于小天体探测。相较于轮式移动,跳跃探测器结构简单,地形适应性好,并且越障能力强,有足够的移动性来完成探测任务。
国内外对跳跃行走这一方式已经开展了很多研究。针对小天体表面探测领域,根据外形可将跳跃探测器主要区分为腿式、球式以及立方体式。Nikita等[10]研究的四足机器人仅采用四肢进行姿态控制,可实现微重力环境下的受控跳跃和着陆。用于火卫一和类似天体的刺猬机器人不但能进行跳跃运动,还能进行翻滚运动[11]。Wang等[12]提出了一种可进行滚动和跳跃的多模运动球形机器人并验证了其在微重力环境下的适应性。微型跳跃探测机器人Minerva通过内部飞轮产生的旋转力矩使机器人跳跃[13]。Gajamohan等[14]基于倒立摆模型的单自由度系统研究了立方体外形跳跃探测器Cubli。王飞等[15-16]研究了跳跃探测器控制策略并分析了不同参数对跳跃运动的影响。可展开立方体[17]通过起跳和着陆时的变形可有效抑制反弹。Hayabusa 2携带的MASCOT探测器通过内部的质量摆实现了小天体表面的跳跃移动[18]。面向小天体表面探测任务,当前跳跃机器人的研究更多偏向于立方体式,相较于腿式和球式,立方体式探测器具有结构简单,易于控制以及表面稳定性好等优点。
良好的路径规划可以有效减少跳跃机器人的移动路径以及同小天体表面的碰撞次数。方法可分为传统规划算法、智能规划算法以及基于采样的规划算法3类[19]。传统规划算法中A*算法具有计算方式简单,规划路径短的优点,国内外学者对其改进算法做了广泛研究,Gunawan等[20]提出平滑A*算法提高了路径可跟踪性。Zheng等[21]针对AGV进行了A*算法优化,加入角度代价评估函数提高了计算效率。舒伟楠等[22]通过改进评价函数减少了遍历的节点总数,并且对冗余节点进行平滑处理。目前对A*算法的改进主要集中于路径平滑,拐点减少及搜索效率等方面,同时算法规划对象多为可以在行进过程中连续实现方向速度改变的物体,并且需要在此过程中进行障碍规避。而跳跃探测器单次跳跃运动方向与距离由起跳初始速度决定,其路径为可跨越障碍的连续线段,当前方法难以满足需求。
基于以上研究,本文以内部飞轮驱动的立方体跳跃探测器为对象,分析弱引力下的起跳过程,并给出了起跳模式。以姿态控制与表面碰撞相结合的方式设计单步跳跃策略。最后结合探测器的越障能力,提出变步长A*算法,实现了跳跃探测器的表面移动路径规划。
1 弱引力表面运动
将探测器抽象为一个质量分布均匀的刚性立方体,在质心处安装三轴正交的飞轮。探测器初始静止在小天体表面上,内部飞轮旋转产生力矩,当力矩足够大时,表面对探测器的等效支持力将作用于顶点,探测器将绕该顶点发生转动。此时重力相对于该顶点的力矩将逐渐减小,质心的法向和切向速度逐渐增加,同时表面对探测器的支持力在逐渐减小,当支持力减到0时,探测器将跳起。跳起后在空中作抛物线运动,此时可以控制飞轮力矩以使探测器获得期望姿态。如图1所示。
1.1 动力学建模
根据上述描述,探测器的起跳过程可描述为刚体的定轴转动,根据起跳力矩的不同,转轴的描述方程也不相同。如图2所示,起跳顶点为A,起跳速度垂直于转动轴。

图2 绕轴转动俯视图Fig.2 Top view of rotating around axis
设质心初始坐标为(-l,-l,l),起跳力矩为旋转轴的单位矢量为a=(xa,ya,za),则绕轴转动的坐标转换矩阵为

其中:c=cosα;s=sinα;d=1-cosα θ=arctan(|Ty/Tx|);α为探测器绕轴转动的角度。
由此可得起跳动力学方程
其中:T为合力矩;IA为绕旋转轴的转动惯量。
1.2 起跳模式分析
在探测器绕轴转动t=0时刻,应有α==0,并且>0。由此可得绕轴转动所需最小力矩为

探测器从转动至离开表面起跳,存在黏滞和滑动两种状态,记静摩擦系数为 µ0,动摩擦系数为µ,在黏滞状态下有

若不满足式(6),则说明起跳过程出现滑动,此时有

其中:vt表示切向速度矢量。
黏滞状态下若力矩不足,探测器只能绕轴转动而无法起跳,如图3所示。

图3 无法起跳Fig.3 Unable to jump
结合式(3)~(5)可得
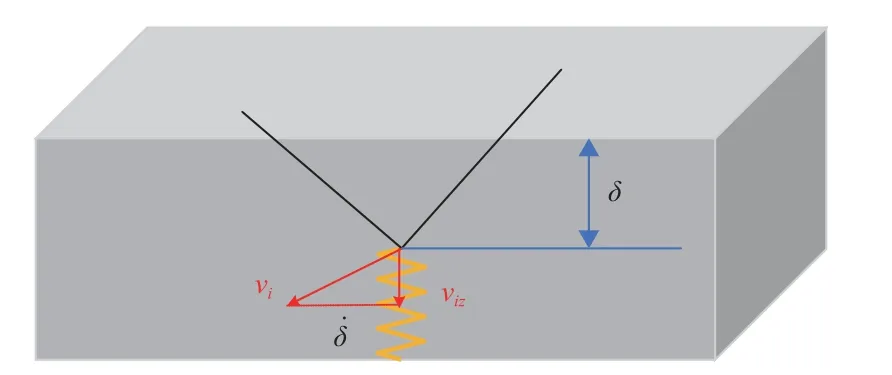
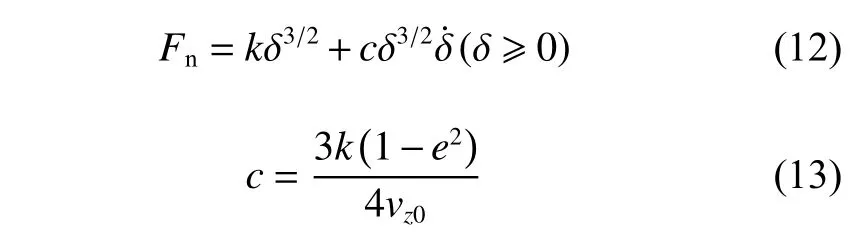
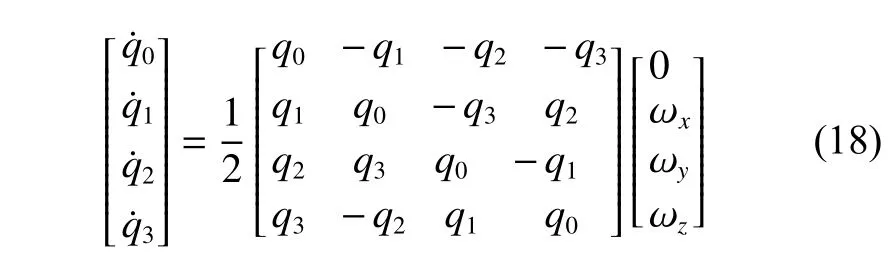
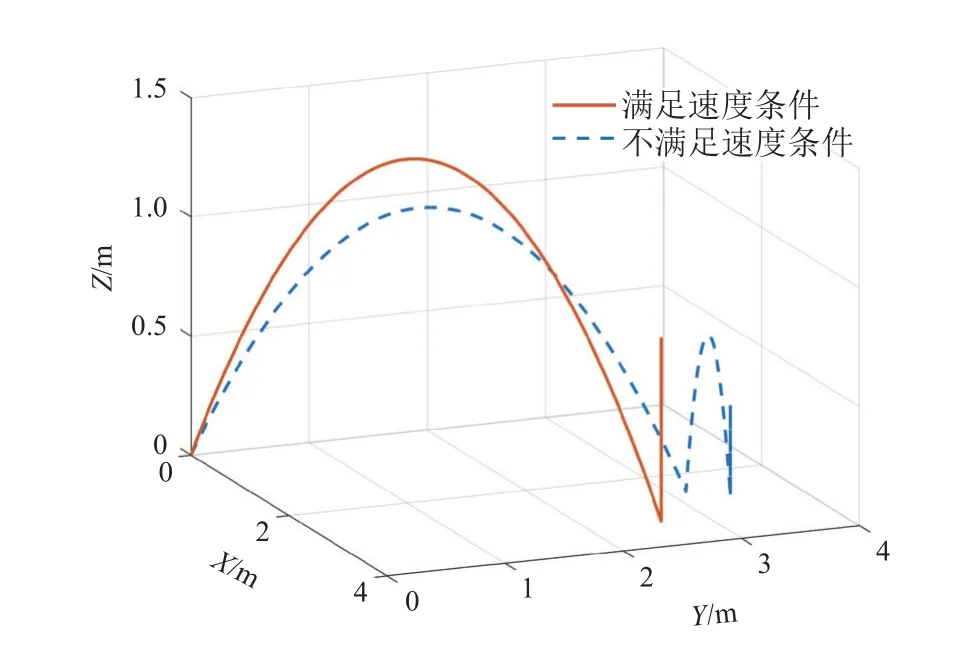
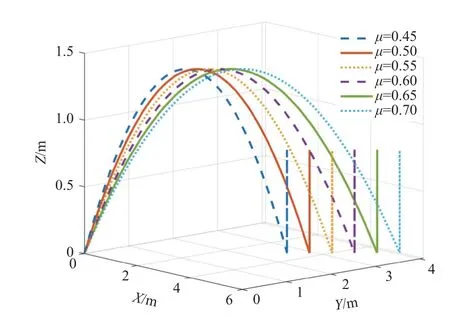
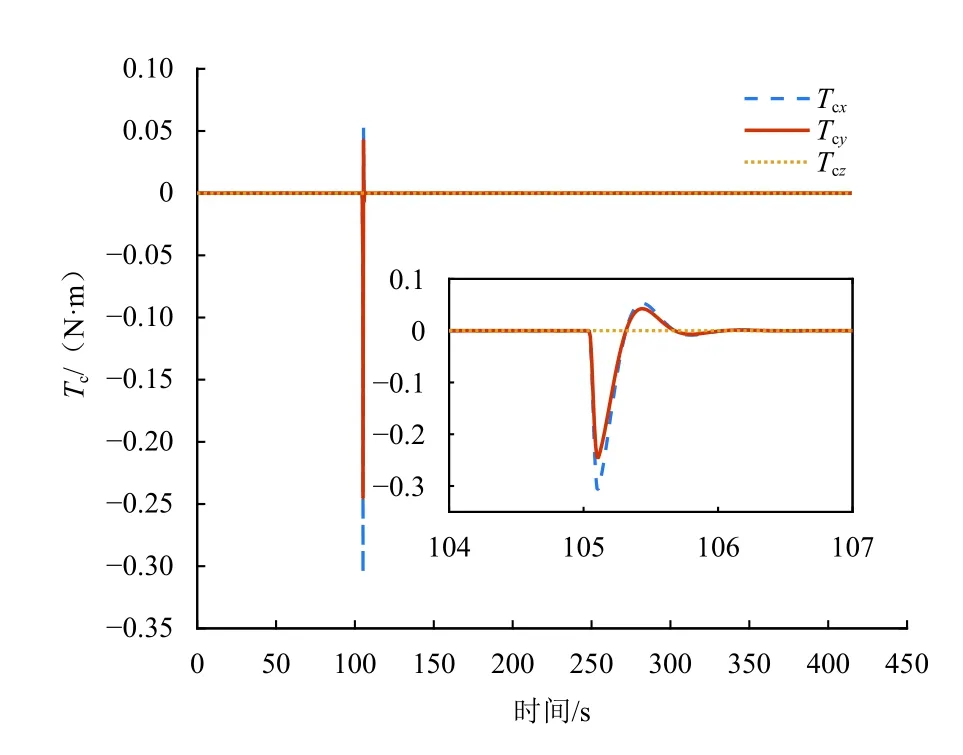
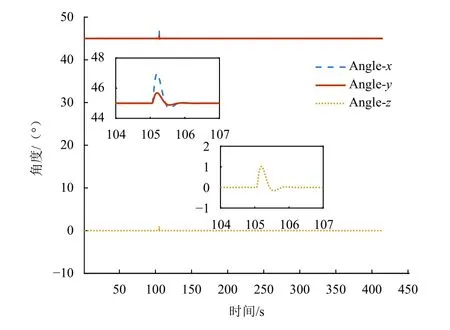
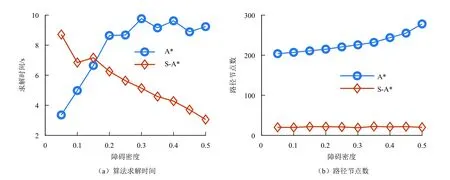
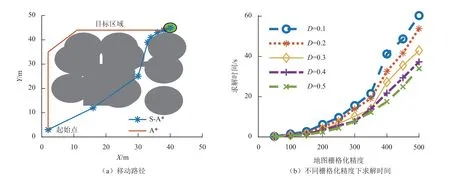
因此,要使探测器能以黏滞状态起跳,其力矩必须使Fn在0<α 分析探测器在小天体表面的黏滞及滑动起跳过程,探测器质心速度变化如图4所示。黏滞起跳模式所需时间明显更长,并且起跳的法向速度也更小,不利于探测器的越障性能。而滑动起跳模式有足够的法向速度,以该速度能越过较大障碍区域,在空中的时间足够完成姿态调整。根据以上模式分析,探测器应当以滑动状态起跳为佳。 图4 黏滞和滑动模式的起跳速度Fig.4 Jump up speed in sticking and sliding mode 考虑到小天体表面风化层的存在,探测器与表面碰撞有一定持续时间。因此,将这一过程等效为有摩擦的非完全弹性碰撞问题,引入非线性阻尼模型,采用连续接触力方法描述碰撞过程中的受力、作用时间等因素[23-25]。 如图5所示,碰撞时法向接触力表示为 图5 法向接触力Fig.5 Normal contact force 其中:k为接触刚度系数;δ为侵入深度;c为阻尼系数;e为恢复系数;vz0为接触瞬间的法向速度。 碰撞过程非瞬时,探测器在碰撞时可能会产生切向位移,其运动受摩擦力影响,基于理想表面假设,采用库仑摩擦力模型计算切向摩擦力为 跳跃探测器采用飞轮作为执行机构,根据欧拉方程可得 其中:下标“I”和“B”分别代表惯性坐标系和本体坐标系。 由欧拉方程求得在系统质心坐标系下多刚体姿态动力学方程为 其中,ω为探测器角速度矢量列阵;Ωw为飞轮转速列阵;U为飞轮安装矩阵;I为探测器转动惯量;Jw为飞轮转动惯量组成的对角阵;Tb为外力矩在质心坐标系下的分量列阵。 由式(14)可得探测器角加速度矢量如下 采用四元数表示姿态,四元数微分方程表示成矩阵形式为 为准确到达目标地点,需要合理控制飞轮的输入力矩,而且当探测器起跳后或与表面碰撞后,具有一定的角速度,在做抛体运动的同时自身也会旋转,若不进行控制,与表面接触时的姿态及碰撞后运动方向难以预测。因此探测器起跳后施加姿态控制,使其以期望的目标姿态落向表面。 设探测器当前姿态四元数为Q,目标姿态四元数为Qf,误差四元数为Qe,则有 设当前姿态角速度为 ω,目标角速度为ωf,则定义误差角速度为 本文采用PID控制,控制律如下 其中:kp、ki、kd分别为比例、积分和微分系数。 探测器在与小天体表面碰撞过程中速度逐渐衰减,每次弹跳高度降低,其越障能力有所减弱。为保证探测器在一次起跳回合中具有足够的越障能力,提出表面移动单步弹跳策略,即每次起跳在切向方向只移动一步。该策略的实施具有两个前提: 1)起跳后第一次与表面碰撞过程中将切向速度降为0; 2)在碰撞过程中尽量减小外力矩干扰,以保证质心速度沿法向变化。 对于前提1,切向速度由vxy减至0的耗时小于碰撞时间即可,也即碰撞时速度满足 对于前提2,以质心和顶点连线垂直于小天体表面的姿态进行碰撞,从而消除支持力对质心产生的力矩。图6显示了是否满足式(22)速度条件的探测器轨迹。满足速度条件时,探测器第一次与表面碰撞即将切向速度降为0,而后满足前提2的碰撞姿态在落点处弹跳,直至停止运动。 图6 探测器轨迹对比Fig.6 Comparison of rover trajectories 为验证该策略在不同场景下的适用性,针对小行星表面不同粗糙程度进行研究,在相同起跳力矩下探测器依然可以实现单步弹跳,如图7所示。此外,根据小天体尺寸将其分为百m级、km级、10 km级3类,其对应的引力加速度量级为10-3m/s2、10-4m/s2及10-5m/s2,根据不同的引力大小相应改变起跳力矩,由图8结果可以证明在不同引力场的小天体上单步弹跳策略同样可以很好地实现。 图7 不同表面摩擦系数下探测器轨迹Fig.7 Rover trajectories under different surface friction coefficients 图9和图10显示了单步弹跳的探测器姿态角和控制力矩变化。由于碰撞时间很短,外力矩作用时间有限,探测器在短时间内即可调整至目标姿态。 图9 飞轮力矩变化Fig.9 Variation of flywheel torque 图10 姿态角变化Fig.10 Variation of attitude angle 对于目前大多数使用路径规划的对象来说,其运动路径都是时刻连续可控的,能在任意时刻对其方向和速度进行改变,而且这些对象更多的是进行避障运动。跳跃探测器最大优势在于其能够直接越过部分表面障碍,本文在传统A*算法的基础上进行了改进,结合越障能力,以单步跳跃的最小和最大距离定义搜索步长范围(Smin,Smax),提出适用于跳跃探测器的变步长A*算法(S-A*),算法流程如下: 1)创建OPEN表和CLOSED表,将起点A加入OPEN表; 2)查看以A为中心、以(Smin,Smax)为半径的n个点,将其中可到达的点加入OPEN表,将这些点称为A的子点,同时将A从OPEN 表移除,加入到CLOSED表中; 3)从上一步加入OPEN表的点中选出评价函数值最小的点A1,评价函数为 其中:G(n)表示从起点A移动到相应子点的代价;H(n)表示从指定点移动到目标点B的预计代价。 4)对A1进行第2步操作,将其能够到达的子点加入到OPEN表中,若子点已存在OPEN表中,则检查经由A1点到达该子点是否有更小的G(n)值,若有则将该点设置为A1的子点,重新计算评价函数值,获得A1的最优子点A2; 5)对A2进行相同操作,直到目标点B成为最优子点; 6)从目标点B反向沿着各节点的父节点前进即可获得最终路径。 图11展示了不同障碍密度条件下的算法效果。当障碍密度较小时,S-A*相较于A*进行了很多无效搜索,此时效率较低。障碍较多时,变步长策略降低了所需拓展节点数,明显提高了计算效率。若障碍密度过高,则传统方法可能出现无法找到路径的情况。结果表明S-A*算法更适用于小天体表面的复杂地形。 图11 不同障碍密度算法效率对比Fig.11 Comparison of algorithm efficiency under different barrier density 图12(a)展示了探测器运动路径及算法改进前后的探测器移动路径对比,利用探测器的越障能力,改进后路径更短。但同时S-A*计算效率受到地图栅格化精度(1 m划分的栅格数)的影响,精度提高,路径规划求解时间显著增加,如图12(b)所示,D为障碍密度。因此,该方法对于高精度、高实时性的任务需求具有一定的局限性。 图12 移动路径对比Fig.12 Movement path comparison 为获取制定小天体防御策略的基础数据,针对小天体表面巡视探测,以立方体构型的小天体表面弹跳探测器为对象,分析了起跳模式,结果表明以滑动模式起跳具有更好的移动性。在起跳后结合姿态控制提出了单步弹跳策略,保证在每个起跳回合探测器的越障性能最佳。针对探测器特点提出变步长A*算法,在生成越障路径的同时提高了小天体复杂表面下的算法效率,仿真结果说明了该方法的有效性。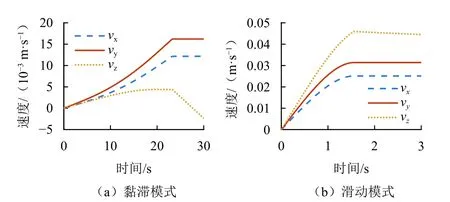
1.3 表面碰撞

2 姿态控制与表面碰撞
2.1 姿态运动模型



2.2 姿态控制律设计



3 单步弹跳策略

4 路径规划

5 结论
猜你喜欢
今日农业(2022年2期)2022-11-16
汽车实用技术(2022年13期)2022-07-19
新视线·建筑与电力(2021年4期)2021-11-01
新视线·建筑与电力(2021年2期)2021-09-10
北京青年周刊(2020年33期)2020-08-28
小哥白尼·趣味科学画报(2019年12期)2019-02-28
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
山东青年(2016年12期)2017-03-02
农机使用与维修(2014年12期)2014-12-17
