
一种面向老龄人群的跟随助理机器人设计*
2022-10-12 06:22周陈标
科技与创新 2022年20期
周陈标,曾 强
(湖北工业大学机械工程学院,湖北 武汉 430068)
目前,中国已进入老龄化社会并处于老龄化不断加深的阶段。根据2020 年全国第七次人口普查数据,中国现有60 岁及以上老年人口为2.64 亿,占全国总人口的18.7%。随着国内老龄人口的增加,老龄化社会带来了一系列医疗和看护问题,加上国家中长期科技服务机器人发展战略的提出,中国社会对老龄人群服务机器人市场的需求越来越大。现在的研究大多是面向半失能老人,如马金平等针对半失能老人设计行走辅助轮椅和移动辅助机器人,辅助老人完成起坐、落座和上厕所等基本动作,但设计结构相对复杂,不易操作。实际生活中还是健康的老龄人群居多,保护老人出行安全是家人最为关心的问题,面向他们的服务机器人满足跟随、报警等基本功能即可,要求简单易行。本文以STM32F4 控制器核心,提出对机械结构模块、电机模块、传感器模块以及软件控制模块不同的设计要求,根据要求设计一种机器人,能够稳定地跟随老人提供载物功能,实时检测老人的健康情况。
1 设计要求
设计一款面向老龄人的自动跟随机器人是一份非常复杂的工作,涉及到机械、电气、传感器以及计算机等诸多领域,所以本次设计要求划分为机械结构、电机、传感器和软件控制4 个模块,该4 个模块的设计要求如下。
机械结构模块:根据机器人跟随特性和使用场所,要具有一定的运载能力以及在狭小空间的机动能力,整体设计轻量结实,并且能适应部分恶劣的环境,在一定条件下机械结构能够抗住外界冲击载荷,具有一定的机械结构强度。
电机模块:机器人可以灵活转向控制,满足各个方向上旋转半径最小的姿态要求,使机器人能够灵活地应对不同的路面状况。
传感器模块:机器人的挪移报警和手环遥控对当前机器人姿态作出实施检测和判断,同时依靠老人的生理数据作出维护和判断是否报警,检测老年人的生命体征。
软件控制模块:将机械结构、电机和传感器3 个模块联系起来,通过程序的方式写入电脑,完成对机器人所需的控制任务。
2 设计内容
总体方案原理如图1 所示,机械结构设计提供载物功能并放置电机及传感器,电机和传感器相互联通,传感器检测电机状态和老人生命体征触发报警或通过手环供老人和家人查询,电机控制机器人实时跟随老人,其电量也可通过手环查询,这些控制方案均通过以STM32F4 控制器为核心的控制系统进行软件控制实施。
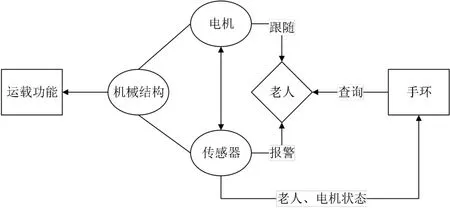
图1 总体方案原理图
2.1 机械结构设计
机械结构设计遵循2 个原则。首先是简洁,从而避免大量的焊接、装配或撞击造成的误差累计;其次是强度重量应比刚度重量大,使机器人在重量限制下尽可能的稳定,耐撞击。
2.1.1 底盘
底盘高度直接决定了机器人重心的高低,重心过高在快速运动或者突然撞击时可能会发生侧翻,而重心过低在面对复杂路况时机器人的机动性不够高,且导致底盘不同程度的受损。底盘高度设计图如2 所示,将底盘的接近角为40°,通过角为37.2°,框架结构选择粗铝方管,底盘采用2 块碳纤维板中间通过2 根铝方管垫高连接,搭配全包围的防撞框架以及4 个导向轮的防撞系统。
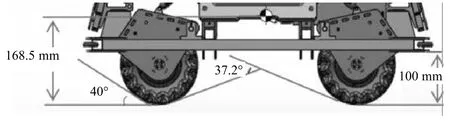
图2 底盘高度设计原理图
2.1.2 轮系
在底盘模块中,轮系是重要的组成部分,将轮系迭代,设计轮系如图3 所示。通过对轴进行校核计算,选择8 mm 的轴作为转轴,其次通过轴系侧板、角码、滚针轴承以及轴承座来固定轮系,实现麦轮的绕轴旋转,同时为了更好地定位以及减小摩擦带来不必要的损坏,采用轴套定位,用滚针轴承来降低摩擦,用卡簧来固定轴向位置。此设计使整车构成良好阻尼系统,减震效果理想。
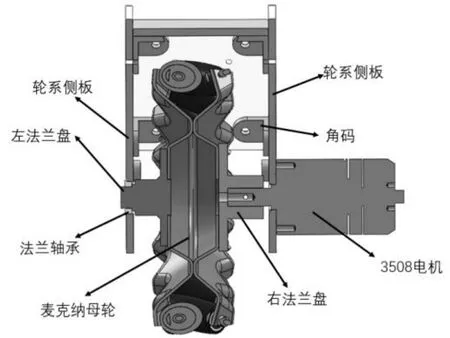
图3 麦轮轮系剖面图
2.2 电机设计
为了能够让机器人可以灵活转向,采用M3508 减速电机和C620 电调,M3508 减速电机由电机与减速器完美集成,配备拥有FOC 控制技术的C620 电调,并采用单片机等芯片对电机进行控制,满足各个方向上旋转半径最小的姿态要求,使机器人能够灵活应对不同的路面状况。
图4 为电机控制逻辑框图,程序采用FreeRTOS(实时系统)架构,程序开始运行后进入任务初始化,第一步创建起始任务(此时仅有一个任务),在起始任务中创建初始化任务、地盘任务等。然后删除起始任务,进入队列模式,当任务需要执行时会进入队列排队,按照优先级高低进行排列,优先级数字越低优先级越高,优先级高的任务排在低的前面执行,相同优先级任务产生请求前的任务优先执行。
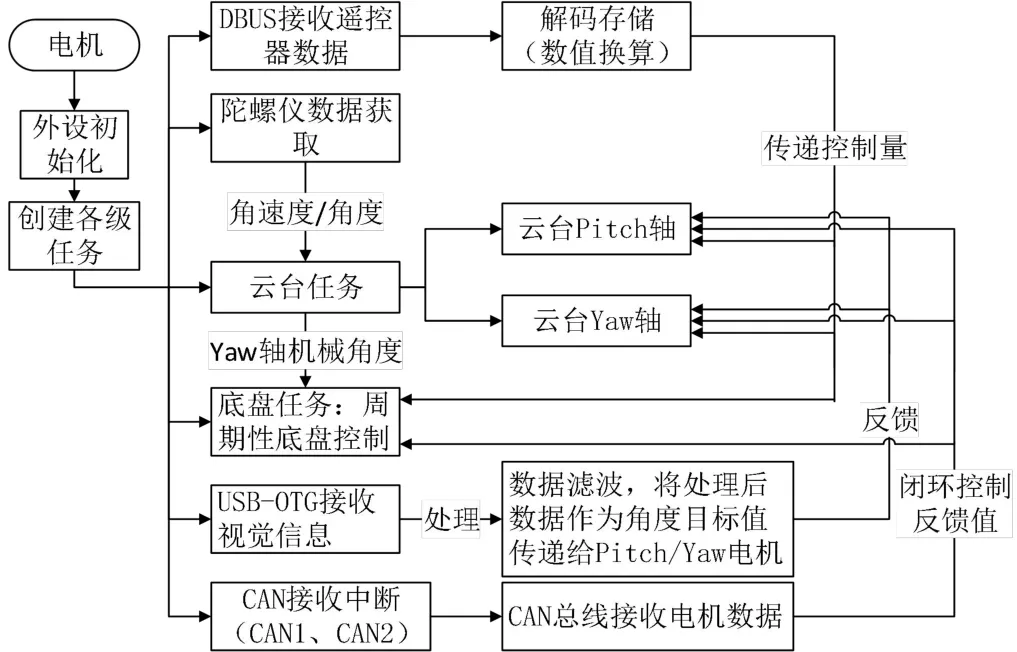
图4 电机控制逻辑框图
2.3 传感器设计
本文设计的机器人功能相对复杂,其核心功能是跟随操作者,因此要确定使用者和机器人的距离,根据距离的变化,自动给4 个轮子适当调节。除此之外,跟随行进的过程中要具有简单的避障能力,获取机器人的姿态,同时实现老年人的陪护功能以及机器人自身的保护监测。这要求设计中选择合适的传感器,以及确定传感器在机器人上的放置位置。为了更好地实现上述功能,使用了大量的传感器及其模块。其中包括温度传感器、红外传感器、压力传感器、装甲模块、灯条模块、电源管理模块、主控模块、定位模块、图传模块、超级电容模块以及Wi-Fi 模块等。同时重新设计云台,使云台在整体上结构合理、稳定,能精准稳定控制云台俯仰轴向运动,具体参数如表1 所示。

表1 性能指标
2.4 软件控制设计
以STM32F4 控制器为核心的软件控制是最为关键的一步,为保证控制系统的稳定性,作出如下设计。初始化任务优先级为3,任务开始初始化外部硬件,执行一次循环任务,挂起初始化任务。拨盘任务优先级为2,初始化拨盘获取各硬件指针,设置电机PⅠD 参数和光电门计时时间,之后每2 ms 执行一次循环任务,更新电机、光电门反馈,设置遥控器状态和电机PⅠD计算值,最后根据遥控器设置状态及PⅠD 计算量。保护任务优先级为2,初始化设置开始循环任务,获取当前系统时间,判断系统是否失控,若失控则挂起除本任务以外的任务,并且解挂失控保护任务,若未失控则挂起失控保护任务。失控保护任务优先级为2,初始化所有外部硬件且将所有外部硬件计算值设为0。云台任务优先级为1,初始化云台获取各硬件指针,初始化相对位置PⅠD 和绝对位置PⅠD,设置视觉识别帧数组和云台电机初始值,然后每1 ms 执行一次循环任务,更新云台反馈量,遥控设置状态,设置电机PⅠD 计算值,开始云台电机控制并进行PⅠD 计算。底盘任务优先级为0,初始化底盘获取各硬件指针,初始化PⅠD参数并设置初始值,每3 ms 执行一次循环任务,遥控设置状态,更新底盘反馈量,遥控器根据状态设置控制量。此外,本设计模块通过手机APP 通过Wi-Fi 连接以及智能手环通过蓝牙连接实现无线控制,达到智能控制的目的。
3 总结
本次设计的跟随陪护机器人,基本满足了设计要求,有很高的实用性。可充电铅蓄电池与太阳能板电池相结合的双重电源为机器人提供充足续航能力;各模块之间采用模块化连接方式,在某一模块发生故障时,可快速拆卸维修;智能手环蓝牙连接、手机Wi-Fi连接等多种控制方式;竖置榫卯结构云台,云台平滑性较好及控制精度较高。该款跟随机器人有较强的移动能力和运载能力,在日常生活中可以帮助老年人运载行李和物品,有挪移报警、体征警报检测、手环遥控等功能,并且有较强的扩展能力。此设计可应用在老人出行的多种场所,在日常生活中为老年人提供帮助,实时收集老年人的部分生理信息,在异常时可以及时发出警报,减少了老年人单独出行的危险性,提高老年人的生活质量。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
影像视觉(2020年2期)2020-03-19
电脑报(2019年30期)2019-09-10
作文大王·中高年级(2018年7期)2018-08-18
通信产业报(2018年42期)2018-03-01
小康(2016年19期)2016-09-10
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20
摄影之友(2015年9期)2015-11-18
大众摄影(2014年11期)2014-12-02
人民交通(2009年2期)2009-03-04
