
丘陵山地小型牧草收获机械设计与试验
2022-10-11 08:29贵州农业职业学院肖连军黄玉芳杨光龙
农机科技推广 2022年9期
○贵州农业职业学院 肖连军 黄玉芳 杨光龙
我国南方草场多以丘陵山地为主,由于自然地块狭小、土地形状不规则,机械作业环境差,成套的大型机械无法进场收获牧草,主要依靠人工完成,劳动强度大,功效低,严重制约草业的发展。因此研制小型轻便,性能稳定、可靠性好、适用性强的牧草收割机械,具有一定的现实意义。
一、系统设计方案
该牧草收割机械主要由收割系统、电机传动系统、蓄电池动力系统、行走系统和手机终端系统等基本模块组成,拓展模块为云平台服务系统、植株识别视觉系统,牧草智能打包系统,其结构如图1所示。
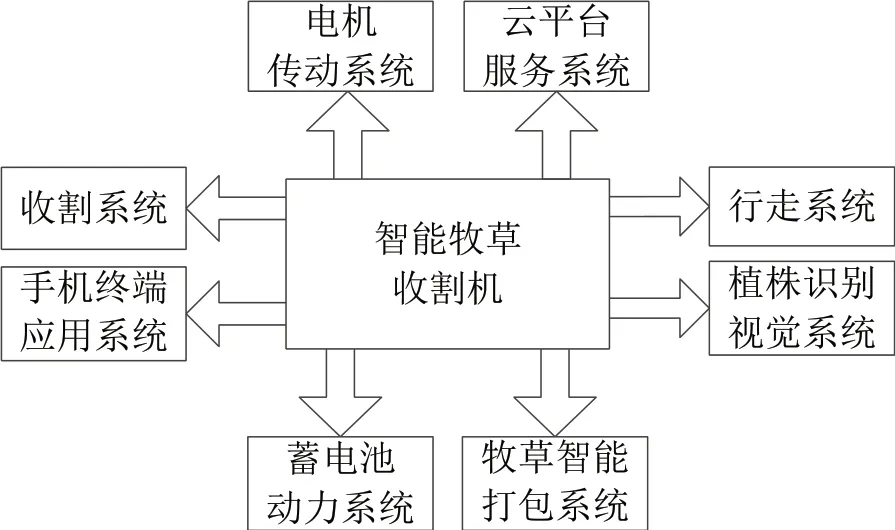
图1 牧草收割机结构框图
二、 硬件设计
牧草收获机械设计指标见表1。

表1 牧草收割机械设计指标参数
1.机身设计。机身设计采用Siemens PLM Software的一款应用软件(Unigraphics NX)进行设计制作,如图2所示。

图2 机身三维设计
2.主控芯片选型。主控芯片选择STM32F103,该器件采用Cortex-M3内核,CPU最高速度达72 MHz,实时性较好,能够满足系统的实时控制需求。STM32芯片功能强大,为后期研制牧草收获功能拓展预留研发空间。
3.电机驱动模块选择。利用电机驱动模块的作用是借助电机传动驱动行走机械动作,驱动模块所选择的型号为AQMH3615NS。该模块利用两输入的高低电平逻辑关系PWM(脉冲宽度调制)波控制牧草收割机械调速、正反转及刹车。
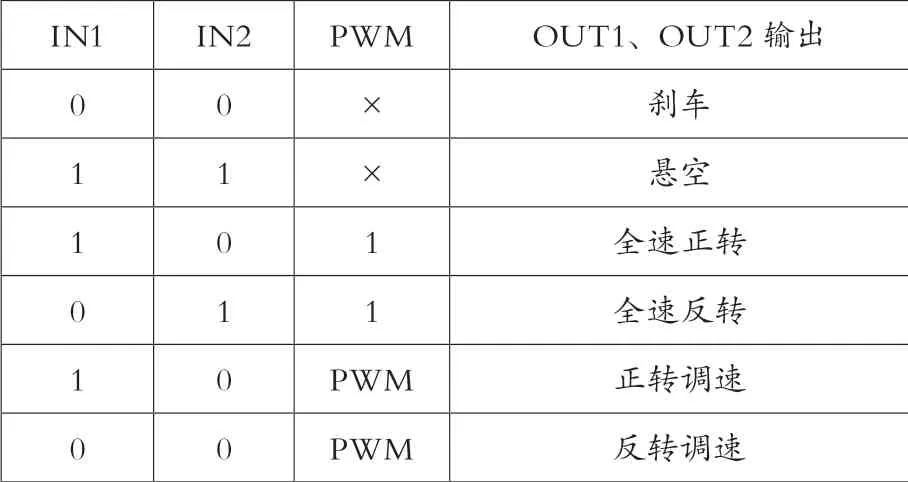
表2 电机驱动模块的驱动逻辑
3.动力蓄电池选择。针对现存的燃油动力收割机械,作业时环境污染大,本项目利用蓄电池为系统供电,牧草收割作业全程无污染,清洁环保且运行使用成本低。选择的蓄电池品牌为玺霸,其主要参数如表3所示。
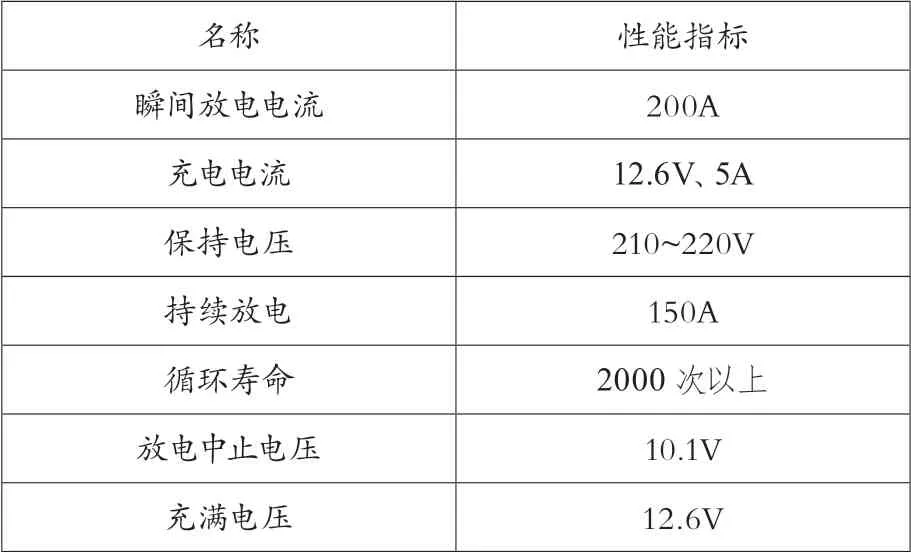
表3 动力蓄电池主要性能参数
4. WIFI模块选型。选用ESP8266无线模块,一款超低功耗的UART-WiFi 透传模块,拥有业内极富竞争力的封装尺寸和超低能耗技术,专为移动设备和物联网应用设计,可将用户的物理设备连接到WIFI无线网络上,进行互联网或局域网通信,实现联网功能。
三、 样机试验
1.试验条件。牧草收割机械理论前进速度0.25m/s。
2.试验牧草种类。种类1:甜象草,分蘖能力极强、生长快,特点为草茎刚强,牧草高度约40cm;种类2:多年生黑麦草,特点为草茎柔软,牧草高度约15cm。
3.试验方法。将对2种牧草试验区域进行等面积块划分为3大块,每块再分为等面积的2小块。
4.割草刀具的选择。类型1为2叶片,特点为刀刃稍钝,类型2类3叶片,刀刃锋利。
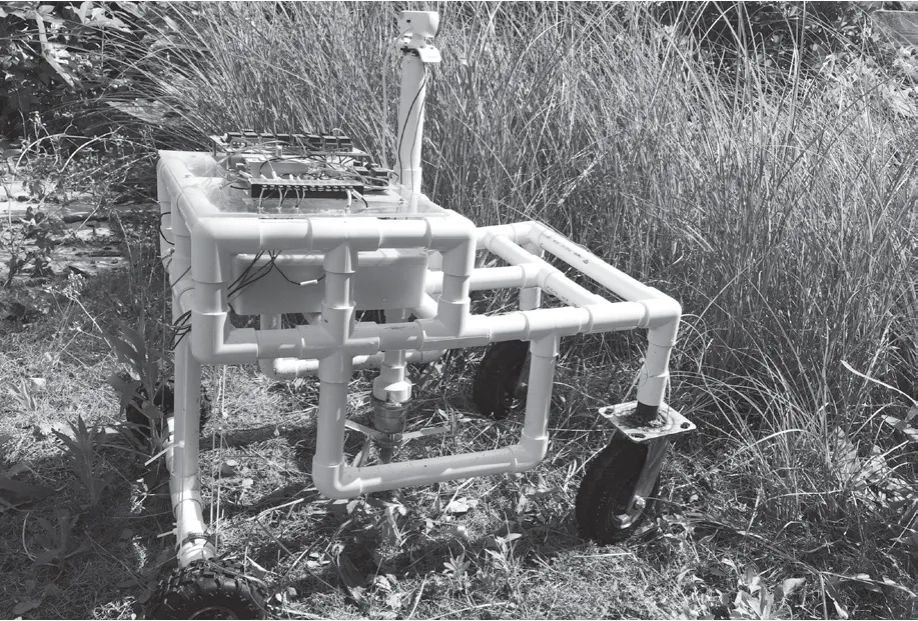
图3 牧草收割样机
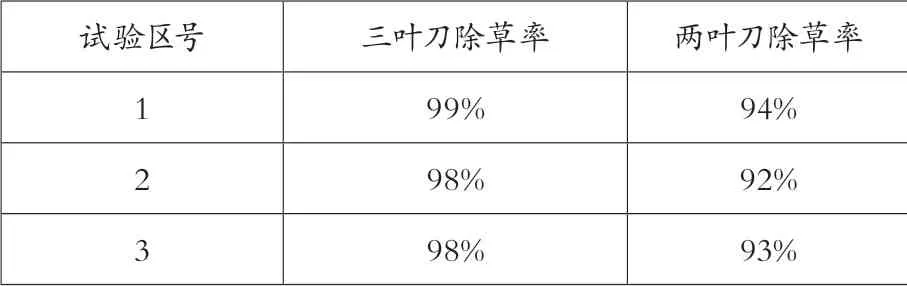
表4 牧草种类1试验数据

表5 牧草种类2试验数据
5.试验结果分析。通过试验数据可知,对于牧草种类1,草茎刚强,选择刀刃锋利的刀具割草,割草率高;而对于牧草种类2,草茎柔软,当收割刀具为2叶刀具时,割草率不如刀具2,出现漏割的现象。
本文从丘陵山地小型化牧草收割机械的设计、研制和试验出发,通过试验验证了方案的可行性,同时为多功能的牧草收割机械以及精准作业机械的研究奠定了基础。
猜你喜欢
农村百事通(2021年4期)2021-04-27
装备维修技术(2020年10期)2020-11-19
河南农业·综合版(2020年11期)2020-11-17
参花·青春文学(2020年10期)2020-09-26
农民致富之友(2020年19期)2020-07-18
农民致富之友(2018年9期)2018-06-27
幸福(2018年3期)2018-03-13
小学生作文选刊·低年级版(2017年11期)2017-12-05
幸福·婚姻版(2017年3期)2017-03-24
中国新闻周刊(2017年7期)2017-03-22
