TiRobot手术机器人辅助经皮无头加压螺钉内固定治疗腕舟骨骨折
2022-10-09 10:00高广辉尹成国胡亮姚保兵王大钊王业本
实用手外科杂志 2022年3期
高广辉,尹成国,胡亮,姚保兵,王大钊,王业本
(济南市第三人民医院 手及上肢外科,山东 济南 250132)
舟骨骨折在腕部骨折中最常见,占腕部骨折的60%以上[1-2]。由于特殊的解剖结构及血供特点,骨折延迟愈合、骨不愈合及缺血性坏死等是腕舟骨骨折预后常见并发症。传统观点认为移位<1.0 mm的舟骨骨折可采取拇指人字管型石膏外固定保守治疗。但长期制动会导致腕关节功能康复时间长,甚至关节僵硬等并发症。随着患者对临床疗效与早日恢复工作或运动的要求不断提高,微创手术治疗腕舟骨骨折越来越多[3-4]。为避免传统经皮内固定术中反复透视定位、多次调整导针位置等缺点,我科2017年1月-2020年1月采用TiRobot手术机器人辅助经皮无头加压螺钉内固定治疗新鲜腕舟骨腰部骨折10例,取得了非常满意的临床效果,现报道如下。
1 资料与方法
1.1 一般资料
本组10例,男8例,女2例;年龄17~50岁,平均34.6岁。致伤原因:摔伤7例,交通事故伤3例。受伤至手术时间:3~15 d。根据Herbert分型:A 2型3例,B1型4例,B2型3例,骨折移位均<1.0mm。
1.2 相关器械及设备
⑴自制腕部背伸固定支具:将手术用无菌单包裹一块40.0 cm×20.0 cm×10.0 cm无菌木块,将另一块无菌单卷成宽约20.0 cm、直径约8.0 cm的圆柱体,应用绷带及刀口无菌薄膜将其固定于木块上方;⑵TiRobot手术机器人系统(北京天智航医疗科技股份有限公司);⑶C臂机(德国西门子公司);⑷全螺纹无头加压螺钉(山东威高公司)。
1.3 手术方法
患者取平卧位,臂丛神经阻滞麻醉,术区消毒铺巾后患肢外展于手术桌。前臂旋前后位绷带固定,腕关节位于柱状无菌单上方,以刀口无菌贴膜固定于背伸位,手部用无菌单垫高,调整腕关节背伸角度,透视证实腕舟骨解剖复位或移位<1.0 mm。将示踪器安装于腕尺侧支具上,调试机器,机身位置锁定。C臂机透视腕关节正侧位,将获取图像数据传送至机器人系统工作站,进行路径规划。术者规划出拟置入螺钉的最佳入钉点和角度,测量长度。路径规划完成后,机器人机械臂自动运行至规划位置,于进钉点做0.5 cm的小切口,应用电钻经套筒置入1.0 mm导针1枚,注意缓慢进针避免针尖滑动,当导针钻至舟骨近侧皮质骨时有明显阻挡感,C臂机透视确认导针位于舟骨中央轴,针尖位于软骨下骨,测量长度。应用电钻打入第2枚1.0 mm导针以避免拧螺钉时骨折断端旋转移位,两枚导针平行并相距>5.0 mm。应用空心钻沿第1枚导针扩髓后,拧入短于规划长度2.0 mm的舟骨加压空心螺钉。透视腕关节正侧位及舟骨位,确认骨折对位良好,螺钉长度及位置满意,缝合切口,敷料包扎,短臂石膏外固定。
术前半小时预防性应用抗生素1次,术后第2天换药并更换高分子材料腕关节支具,术后2周拆线。术后第2天肩肘关节及手指开始主动活动,术后第6周拍X线片证实骨折线模糊后拆除支具开始腕关节屈伸功能康复训练。
1.4 评价指标
⑴术中记录切口长度、导针调整次数、螺钉位置及长度、手术时间、X线透视时长;⑵根据术后影像学表现,骨小梁是否通过骨折线判断骨折愈合时间;⑶Mayo腕关节功能评分;⑷术后并发症:切口感染、腕关节疼痛、关节僵硬、骨折不愈合。
2 结果
本组病例的切口长度为(6.30±1.16)mm;主导针调整次数为(1.50±0.53)次;螺钉均位于舟骨中央位置,螺钉长度为(24.10±1.37)mm,螺钉与轴线角度为(7.10±4.09)°;手术时间为(58.80±10.32)min;X 线曝光时间为(17.24±1.50)s;骨折愈合时间为(10.40±2.80)周;术后12周腕关节活动度均达到正常范围,Mayo评分为(93.50±4.74)分。所有患者切口无感染,末次随访时患者均无腕关节疼痛,骨折均愈合,未见创伤性关节炎、腕关节僵硬等相关并发症。
典型病例:患者男,17岁,摔伤导致右腕舟骨腰部骨折A 2型。臂丛神经阻滞麻醉下行机器人辅助经皮无头加压螺钉内固定术,术后腕关节功能恢复良好(图1-10)。

图1,2 术前腕舟骨正侧位X线片
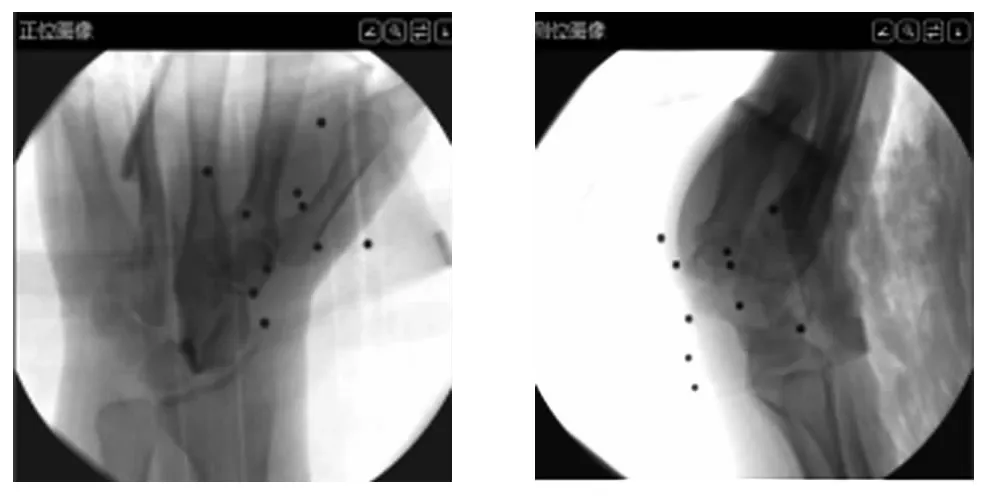
图3,4 示踪器安装于支具上,调试机器及支具,确定骨折对位满意
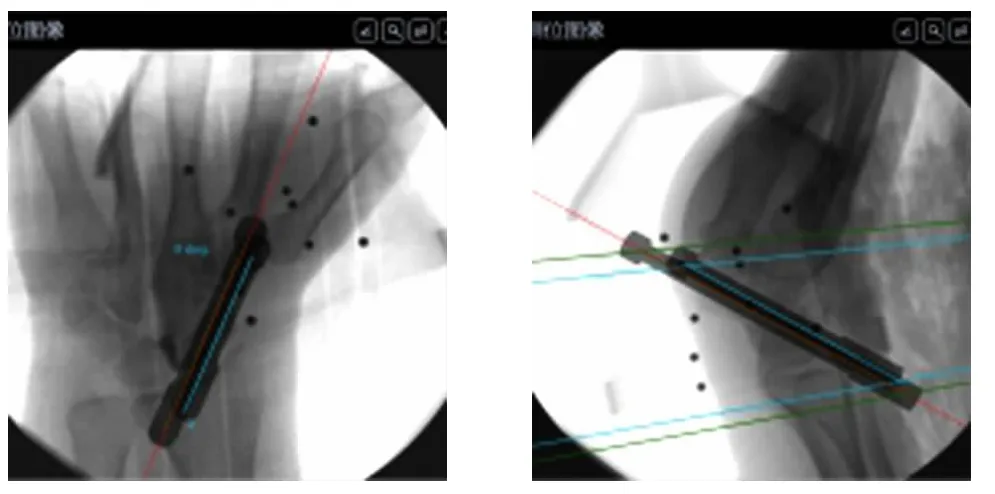
图5,6 规划拟置入螺钉最佳钉点和角度

图7,8 置入螺钉透视腕关节正侧位片示骨折对位及螺钉位置良好

图9,10 术后复查X线片示骨折对位及螺钉固定良好
3 讨论
腕舟骨腰部新鲜骨折的治疗存在一定的争议,有学者将石膏固定与手术进行对比研究,发现腕舟骨腰部骨折的预后,手术治疗明显优于保守治疗[5-6]。国内文献报道,腕舟骨骨折因其特殊结构,保守治疗舟骨骨折骨不愈合发生率高达5%~25%[6]。对于无移位或轻度移位的腕舟骨骨折,石膏固定可以取得较为满意临床效果,但长时间石膏固定易导致关节僵硬;如果治疗方式不当,部分移位的舟骨骨折可能发生延迟愈合甚至骨折不愈合,导致创伤性关节炎、腕关节不稳,以及严重的关节功能障碍[5]。加压螺钉内固定术是目前公认的手术方式,切开显露骨折断端复位固定会进一步破坏舟状骨血供,影响骨折愈合,且术后刀口瘢痕影响美观[7]。因此,闭合复位经皮无头加压螺钉治疗无移位或轻度移位新鲜舟骨腰部骨折得到临床推广[7]。由于舟骨形态不规则,闭合穿针时需要反复透视和多次穿针才能达到理想的固定效果,不仅增加术中放射剂量且易破坏舟骨血运。
第三代TiRobot骨科手术机器人系统由机器人臂、手术规划工作站和光学跟踪系统组成。其工作原理为光学跟踪系统可以通过机器臂上及腕关节支具的示踪器确定机器人臂和术区的相对空间位置。因此,伴随着该机器人系统的出现,既微创又精准的置钉得以实现。国内文献报道[8-9],第三代TiRobot骨科手术机器人辅助下手术已经在骨盆骨折中广泛应用,并且取得了良好的临床效果。由于机器人导航系统置钉时要求肢体固定稳妥,不能产生任何微动,否则置钉时会偏离规划路径,而且腕关节由多个关节组成,活动度相对较大,如果不能有效固定腕关节,示踪器的细微移动都会给手术操作带来较大误差。且计算机导航系统要求在手术部位附近放置示踪器,如果将示踪器固定于尺桡骨上会给患者增加额外的创伤。因此如何有效稳妥地固定腕关节正确体位以及有效固定示踪器,是临床急需解决的一项关键环节,也是导航机器人没有在手外科广泛开展的一个重要原因。随着专用腕部支具的制作及开发,近几年来机器人辅助下舟骨骨折手术逐步开展。郭阳等[4]报道应用灭菌的三维打印模板安置于患肢腕部,为有效防止术中患肢移动,应用两根斯氏针将模具固定于硬塑料背板上,一侧斯氏针针尾固定示踪器,手术顺利完成,术后随访取得了良好的临床效果。季亮等[10]应用热塑性聚氨酯颗粒溶解成透熔流体,通过塑形使之成为能够固定腕关节于最大背伸位的三角形实体支架,完成后送供应室低温消毒,术中将腕关节固定于支架上,临床效果良好。本研究中自行制作的简易腕关节固定支具,应用过程中可以有效稳妥地固定腕部,而且示踪器可以固定于支具上。应用手术用无菌单包裹一40.0 cm×20.0 cm×10.0 cm无菌木块,将一块无菌单卷成宽约20.0 cm、直径约8.0 cm的圆柱状,应用绷带及刀口无菌薄膜将其固定于木块上方;手术时,将自行设计的支具置于铺好无菌单的手术桌面上,利用无菌绷带及刀口无菌薄膜将腕背伸、尺偏位固定于支具上,手掌朝向上方。首先C臂机透视腕关节正侧位,确定舟骨解剖复位或移位<1.0 mm,或移位>1.0 mm,需要调整腕关节背伸角度以纠正骨折端移位。透视满意后,利用无菌纱布填充腕及手下方的间隙,以确保术中腕部固定稳妥,不会随着钻头的置入而改变体位,导致不能按照规划路径置钉。
TiRobot手术机器人系统由机械臂主机、光学跟踪系统、主控台车构成;光学跟踪系统不仅透视明确骨折对位、内固定位置,还实时监控每一个手术环节;机械臂运动灵活、操作稳定,精度达到亚毫米;主控电脑系统如同机器人的大脑,智能传达着术者的设计方案,进行“路径规划”,而且机器人手臂位置可以进行一定的自动补偿,确保规划路径与手术路径保持一致。手术注意事项:⑴腕关节支具的设计以及腕部有效固定,为避免大多角骨遮挡位于舟骨结节的进针点,腕关节要固定于背伸45°位左右,尽量尺偏位,并且透视确定骨折对位满意;⑵示踪器安装于腕部尺侧避免影响机械臂运动轨迹;⑶路径规划;⑷为防止置钉时骨折断端旋转,置钉前再钻入一枚直径0.8 mm克氏针固定断端;⑸规划路径尽量与舟骨长轴重合,螺钉的长度应为测量值再减去2.0 mm,螺钉尖部尽量达到软骨下骨,钉尾埋入软骨下。
TiRobot手术机器人辅助下经皮空心加压螺钉治疗新鲜腕舟骨腰部骨折,可以达到精准、微创,避免对骨折端血运的进一步破坏,同时对术者和患者放射性损害均明显减小;而且术后可以早期进行腕部功能康复训练,明显降低了传统手术并发症的发生几率,临床效果满意。为进一步证实该方法的优越性,下一步我们将开展前瞻性对照研究。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
中老年保健(2021年5期)2021-08-24
中老年保健(2021年6期)2021-08-24
中老年保健(2021年7期)2021-08-22
临床骨科杂志(2021年4期)2021-08-20
云南医药(2021年3期)2021-07-21
国际骨科学杂志(2021年1期)2021-03-25
上海医学(2019年1期)2019-04-13
中华骨与关节外科杂志(2019年9期)2019-03-29
中国当代医药(2015年13期)2015-01-23