笼型异步电动机故障诊断系统设计
2022-10-08 01:12徐平
河南工程学院学报(自然科学版) 2022年3期
徐 平
(河南工程学院 土木工程学院, 河南 郑州 451191)
异步电动机是社会生产生活中最常见的电气设备,在国民生产活动中占有重要地位[1-2]。据统计,仅2019年笼型异步电动机的全球市场规模就达到了148亿美元,预计2026年将会达到164亿美元[3]。异步电动机通常作为机床的主控电机[4],如果出现故障,轻则影响产品质量,重则导致生产线瘫痪,故对异步电动机故障进行监测非常有意义。
异步电动机在实际工作过程中定子、转子和轴承都有可能出现故障[5-7]。定子故障一般指定子绕组故障,包括匝间短路、过热和绝缘故障;转子故障主要指气隙偏心、转子断条或者端环断裂[8-9];轴承故障主要指轴承损坏[10-11]。故障识别需要利用相关物理量[12-16],在获取相关信号的基础上,采用信息融合方法[17]、神经网络或者小波分析[18]等方法进行。但目前一般的研究多集中于一种故障,对3种故障进行诊断的故障分析系统较少。为此,本研究以笼型异步电动机为对象,选择气隙偏心、转子断条和匝间短路3种故障,以电流为基本分析信号设计了故障诊断系统,以便于异步电动机故障分析。
1 故障诊断系统总体结构
故障诊断系统基本流程为利用数据采集卡采集电流信号,对信号进行预处理,根据不同故障的特征分别采用不同方法进行特征提取,根据特征信息进行特征识别,流程见图1。

图1 程序设计流程Fig.1 Diagram of programming design
故障诊断系统基于模块化方法来设计,分为信号采集、信号处理、特征提取及故障识别4个模块。其中,信号采集模块只需要采集电流信号,选用电流互感器和数据采集卡来实现,数据预处理只进行简单的粗大数据剔除。
2 特征提取方法
根据相关理论分析可知,当存在气隙偏心和转子断条故障时,某些特征频率点处会出现幅值突然增大的情况[9]。其中:存在气隙偏心故障时电流信号会在25 Hz及75 Hz的频率点附近出现特征分量,存在转子断条故障时电流信号会在45 Hz和55 Hz的频率点附近出现特征分量,故气隙偏心和转子断条故障识别可以基于频谱特性进行;当存在匝间短路故障时,电流信号经过派克(Park)变换后的矢量轨迹由类圆形向椭圆形过渡。为此,特征提取方法为傅里叶变换和Park变换,其中傅里叶变换主要用于时域-频域信号转换,Park变换用于坐标变换。
2.1 傅里叶变换
傅里叶变换的基本原理是将连续信号表示为不同频率正弦信号的叠加,具体分为三步来进行:首先是将某个点的时域信号变成N个点的时域信号,然后在此基础上计算得到N个点的时域信号频域,进而得到N个频域点,最后将得到的N个频域点按照顺序累加后得到所需要的频域信息。
2.2 Park变换
Park变换的基本原理是将数据由一般坐标系转换到αβ坐标系,设定三相交流电的电流分别为
Ia=Imcosωt,
Ib=Imcos(ωt-120°),
Ic=Imcos(ωt-120°),
(1)
式中:Ia、Ib、Ic分别表示三相电流值,A;Im表示电流基波幅值,A;ω为交流电角频率,rad/s;t为时间,s。
经过Park变换后的电流矢量由Iα和Iβ合成,与原始电流之间的关系为
(2)
3 故障识别
在完成特征提取后,得到傅里叶变换和Park变换后的数据,后续工作就是基于上述数据完成故障识别。为此,对故障识别模块进行了设计,使其能够根据特征提取后的数据判断出具体故障。
3.1 气隙偏心和转子断条故障诊断

图2 气隙偏心及转子断条故障诊断流程Fig.2 Diagram of diagnosis of air gap and broken bar
如前所述,存在气隙偏心和转子断条故障时某些特征频率点处会出现幅值突然增大的情况,对傅里叶变换之后的数据采用差分方法可以判断特征点处是否存在突变。其原理是光滑曲线任意点处的前向差分Δf(k)=f(k+1)-f(k)与后向差分Δf(k)=f(k)-f(k-1)基本相等,而有幅值突变的特征点则会产生凸起,据此可以判断该特征点处是否存在突变。具体流程见图2。
3.2 匝间短路故障诊断
当发生匝间短路故障时,Park变换图不规则程度会加剧,根据其扁平度、矢量轨迹倾斜角度可判断匝间短路故障[19]。先绘制出Iα和Iβ图像,基于点集得到最小边界框,正常电动机对应的边界框为正方形,即边框长和宽相等,否则即为匝间短路故障。具体流程如图3所示。

图3 匝间短路故障诊断流程Fig.3 Diagram of diagnosis of turn-turn short circuit
4 程序设计
由于几个界面的功能是互相独立的,可以认为是多个平行事件,所以采用选项卡功能来实现不同界面的直接切换。该功能模块相对简单,只需要对选项卡进行添加即可。
4.1 数据采集及数据预处理
设计采集程序时,采样的通道数、信号形式、频率、模式、时钟源及数据处理方式等都设置为多选模式,可根据实际需要进行选择。
4.2 特征提取
由前述内容可知,针对气隙偏心、转子断条及匝间短路这3种故障,分别需要用到Park变换和傅里叶变换,采用类似于C语言的语句进行编程,再直接将代码复制到公式节点模块内,通过按键进行傅里叶变换或者Park变换。程序结构如图4和图5所示。

图4 Park变换截图Fig.4 The printscreen of Park transformation

图5 傅里叶变换截图Fig.5 The printscreen of fourier transformation

图6 故障识别算法截图Fig.6 The printscreen of fault diagnosis method
4.3 故障识别
故障识别采用差分法和比较法,判断电动机发生哪种故障并输出故障类型,如图6所示。
5 具体应用
完成系统设计后,针对异步电动机进行了检测。其中:气隙偏心故障通过在端盖上设置调节螺栓来实现(图7)。具体方法是在端盖上增加一个内六方螺栓,螺栓与电动机轴承接触,通过螺栓来调整偏心位置,偏心距设定为0.2 mm。转子断条故障通过在转子上钻孔来实现(图8),设置3根断条。匝间短路故障采用抽头的方式来实现,且只针对B相绕组进行抽头(图9),抽头后电阻是1.7 Ω。

图7 气隙偏心故障设置Fig.7 Setting of air gap fault

图8 转子断条故障设置Fig.8 Setting of broken bar fault

图9 匝间短路故障设置Fig.9 Setting of turn-turn circuit short fault
图10所示为对气隙偏心、转子断条和匝间短路故障的识别结果,可见气隙偏心故障在25 Hz处出现凸起,而转子断条故障在45 Hz处出现凸起,当存在匝间短路故障时,得到的Park变换图非标准圆,可以实现故障识别。
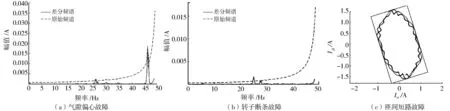
图10 故障诊断结果Fig.10 Results of fault diagnosis
6 结论
本研究以实现气隙偏心、转子断条和匝间短路3种故障的诊断为目标,完成了笼型异步电动机故障诊断系统的设计,得到以下结论:
(1)气隙偏心和转子断条故障诊断可以基于傅里叶变换后的电流数据,采用差分方法来找到特征点处是否存在突变来实现。
(2)匝间短路故障诊断可以基于Park变换后的图像,通过其圆度来实现。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
防爆电机(2022年4期)2022-08-17
科技风(2021年19期)2021-09-07
少儿科技(2021年12期)2021-01-20
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
故事作文·高年级(2018年8期)2018-08-14
快乐语文(2018年7期)2018-05-25
北京航空航天大学学报(2018年1期)2018-04-20