
三维激光扫描技术在日照分析测量中的应用
2022-10-08 01:18李胜天肖琦
资源导刊(信息化测绘) 2022年8期
李胜天 肖琦
(1.江西省地质局地理信息工程大队,江西 南昌 330001;2.江西省地质局第四地质大队,江西 萍乡 337055)
1 引言
近年来,随着我国国民经济的快速增长,城镇居民生活水平日益改善,人们对居住环境的要求有了进一步提高,住宅日照问题逐渐成为广大市民关注的焦点[1]。同时,随着城市化进程的加快,建筑物越来越密集,容积率也越来越大,很多地方因为日照问题造成的纠纷时有发生。因此,对审批建筑物与周围已建或拟建建筑物进行科学准确的日照分析测量的需求越来越大,城市规划部门在建设规划审批前对日照分析测量的要求越来越高。日照分析测量涉及时间、地域、建筑造型等多种复杂因素,要将这些相互影响的因素综合起来进行人工精确计算分析是非常困难的[2]。基于常规仪器的测绘手段存在外业工作量大、需手工制图等不足,已经无法满足现状需求,急需一种快速有效的日照分析测量成图技术来代替。本文以某建筑物为例,利用三维激光扫描技术获取其表面的阵列式点云数据和几何图像,大范围并快速地采集建筑物立面信息,为日照分析测量提供了一种全新的技术手段。
2 日照分析测量
日照分析测量的主要目的是分析待建建筑物对周围拟建或已建的现状建筑物可能产生的日照影响,提供科学准确的日照分析报告,是城市规划部门审核设计方案的依据之一[3]。一般情况下,对于周围拟建建筑物来讲,日照分析所需的基础数据可以从该建筑已批准的修建性详细规划资料中获取;对周围已建的现状建筑物而言,日照分析所需的基础数据必须做到实时、准确、可靠,这也是日照分析测量的重点所在。围绕日照分析所需的基础数据,日照分析测量工作主要包括以下内容:
(1)建筑平立面图测量。现状建筑物的平立面图是进行日照分析的基础,也是日照分析测量的首要任务[4],主要包括建筑物拐点坐标的测定、建筑结构、建筑层数等。
(2)建筑高度测量。建筑高度是指室内地坪至遮阳点的垂直距离,是判断建筑物之间是否产生日照影响的一个重要因素[5]。由于建筑的屋顶部分,包括凸出屋面的水箱、电梯间、构架等设施对日照采光产生影响,因此其自身高度应包含在建筑高度内。
(3)高程测量。日照分析时仅有建筑物的平面位置和建筑高度是不够的,还必须结合建筑物所在位置的地面起伏状况,因此必须测量建筑物的室内外地坪的高程。
(4)窗户及阳台位置测量。窗户分析报表是日照分析报告的重要组成部分,同时对阳台的影响也不可忽略,因此必须测量建筑物向阳面的窗户及阳台位置。 (5)建筑层高测量。建筑层高也是日照分析所必需的数据,建筑层高是指建筑室内净高加上楼板厚度,一般情况下只需量取一层至三层的层高,特殊情况下需量取三层以上部分的层高。
3 三维激光扫描技术
三维激光扫描技术是20 世纪以来发展起来的一项高新技术,是利用激光进行高速、实时、自动获取给定区域目标表面的三维坐标,属于一种大面积高密度非接触式主动测量技术[6]。在测量过程中,利用激光测距原理,激光发射单元从上到下、从左到右发射激光束,接收物体反射回的激光信号,通过计算脉冲或者相位时间差,推算出扫描中心距目标斜距,再配合同时记录下的激光束的水平角、垂直角解算物体表面激光点的三维坐标,同时记录激光点反射强度值,实现全自动阵列式扫描,其定位原理如图1 所示。
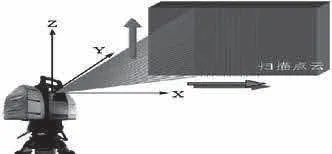
图1 地面三维激光扫描仪定位原理
由图1 所示定位原理来看,地面三维激光扫描仪主要通过测距测角解算目标物体相对于仪器中心的三维坐标,类似于无棱镜全站仪。在扫描过程中,以仪器中心为坐标系原点,激光扫描仪初始扫描方向固定为Y 轴,竖直方向为Z 轴,并以右手坐标系法则确定X 轴构建了扫描仪自身测量坐标系[7]。若测量过程中使用了标靶定向,还可将点云从扫描仪自身坐标系转换到绝对坐标系下。

在式(1)中,D为所测仪器中心至目标点斜距,θ为所测垂直角,φ为所测水平角,通过式(1)即可解算出待测点的三维空间坐标X、Y、Z,从而获得在同一空间参考系表达目标空间分布的点云。
4 项目实例
4.1 项目背景
南昌市红谷滩区某地块拟开发建设高层建筑物,其北侧居住小区的部分沿街建筑物可能受到采光影响,需进行日照分析测量。该处沿街的建筑风格多样、新旧不一、高低悬殊,给测量工作带来一定的困难。考虑到利用传统测绘方法施测难度较大,项目组决定利用三维激光扫描系统进行作业,并利用免棱镜全站仪采集特征点的方式进行精度检查。
4.2 工作流程
三维激光扫描技术在日照分析测量中的应用主要包括三个流程:外业数据采集、内业数据处理、立面模型建立与分析,具体流程如图2 所示。
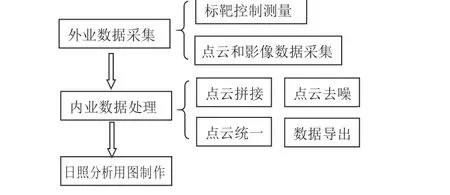
图2 三维激光扫描系统工作流程
4.3 外业数据采集
(1)标靶控制测量
结合日照分析测量的特点和周边环境,并依据扫描的目的和精度要求,在建筑物的拐角处布置标靶控制点并用钢钉做标志,保证测站之间两两通视,并确保与建筑物待测立面通视良好。布设好控制点后,利用CORS 网络RTK 首先联测周边已知控制点,经校核无误后方可进行观测,每个标靶控制点均观测两次,取两次观测值的平均值作为终值,最终得到每个控制点在CGCS2000 坐标系下的平面坐标和高程,便于后期将扫描点云数据统一转换到该大地坐标系下。
(2)点云和影像数据采集
点云数据的获取采用华测Z+F IMAGER 5010C 地面高精度激光扫描仪,该扫描仪具有易携轻量化、外业操作简单、快速等优点,它使用极其纤细的近红外线激光束,采用非接触式快速获取数据的脉冲式扫描机制原理,每秒发射最高可达110 万点的纤细激光束,能获取相对精度高、覆盖范围广的点云数据,单站即能获取一幢楼一个立面的点云数据。点云数据采集的具体步骤为:架设三维激光扫描仪、整平并设置适宜的高度、设置好扫描参数、将后视标靶架设在已知点、直接对待测立面进行扫描并获取点云和影像数据,部分建筑物影像如图3 所示。

图3 部分建筑物影像
4.4 内业数据处理
将采集到的点云数据导入和仪器配套的Recap 360 软件中,点云数据处理主要有点云拼接、点云去噪、点云统一、数据导出四个步骤[8]。
(1)点云拼接
为保证沿街建筑物表面点云配准的精度,采用序列拼接的方法,即从第一站开始,首先利用前两站点云间的2 个球形标靶进行初配准,然后再利用相互重叠的点云进行ICP 配准。同理,按照此方法将所有测站的点云数据拼接完成后,经检测首尾重叠处的点云相差小于6mm,满足相关规范的精度要求。
(2)点云去噪
利用Recap 360 软件手动去除点云中含有粗差的数据和无效的形体数据,这一过程属于去噪处理,在软件中打开拼接完成后的所有点云总图,通过旋转、放大操作将点云调整到理想位置,根据需要在工具栏中选择合适的工具去除噪声点。
(3)点云统一
相邻两站的点云数据在去噪以后存在大量的冗余,造成数据量增大、采样间隔不一致的状况[9],因此需要对点云数据进行重采样。具体过程就是在保证质量的前提下,再次利用Recap 360 软件对点云进行统一化处理,同时将多站点云进行压缩并合并成一个整体。
(4)数据导出
将Recap 360 软件中预处理完成后的点云数据导出成特定格式,以便在点云成图软件中进行深加工,部分建筑的点云成果数据如图4 所示。

图4 部分建筑的点云成果数据
4.5 日照分析用图制作
采用City Scene 点云处理软件进行日照分析用图的制作,主要步骤如下:
(1)读入激光点云数据:打开City Scene 软件,以反射率方式渲染待绘制立面的单站激光点云数据。
(2)建筑物特征点、线绘制:利用City Scene 软件的点、线绘制工具,提取得到建筑物及窗户较为精确的边界或边界特征点,从而确定建筑物的整体轮廓,将绘制的特征点、线导出成dxf 格式的文件。
(3)坐标平移纠正:将采用传统方法测得的建筑立面单个特征点作为控制点,对从点云数据中提取的特征点进行整体平移,以提高成果精度。
(4)建筑平立面图的编辑:将导出的dxf 格式文件导入到AutoCAD 中进行编辑,其中的建筑立面图成果如图5 所示,基于建筑平立面图成果进行日照分析测量的各种基础数据的量取。
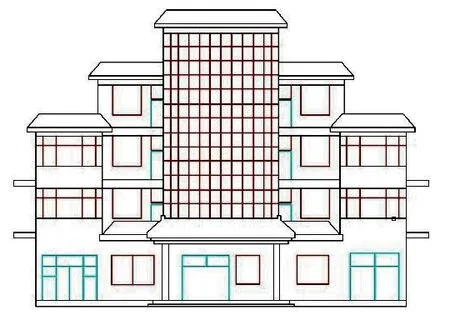
图5 建筑物立面图
4.6 精度检验
为了验证三维激光扫描系统作业成果的质量,选取建筑物的10 个特征点进行比较分析,分别用徕卡TCR402 免棱镜全站仪测量出所有特征点的坐标,将其结果与在三维模型中量取的坐标值进行比较,统计结果如表1 所示。
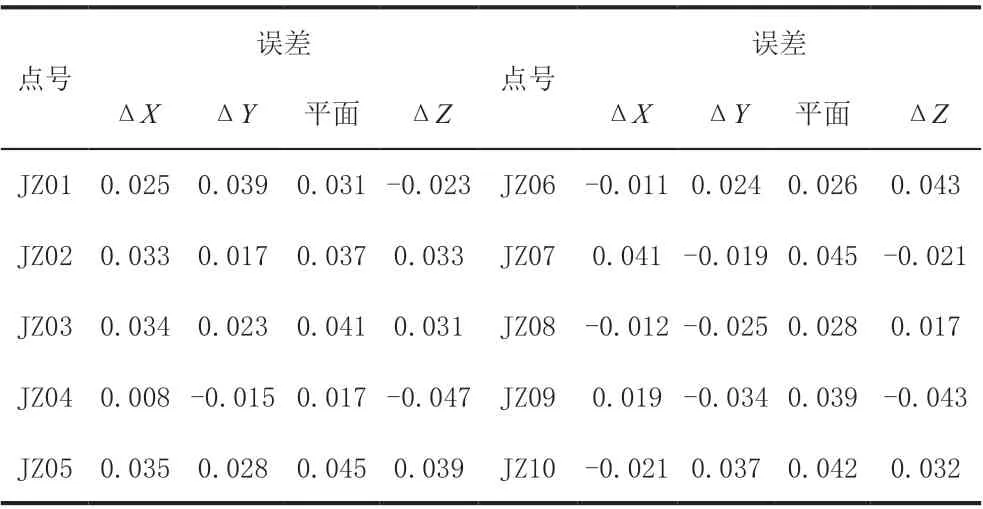
表1 精度统计单位:m
从表1 统计数据看出,10 个特征点的平面位置最大误差为0.045m,高程最大误差为0.047m,满足日照分析用图的精度要求。
4.7 效率分析
将传统日照分析测量方法与三维激光扫描系统的生产效率进行比较:在外业效率方面,利用GPS-RTK和全站仪测一幢普通民房需要两个人,用时10 分钟;而三维激光扫描系统不足1 小时就能完成约50 幢房屋的数据采集。在内业效率方面,传统方法需要对数据进行展点,再跟草图进行对比,最后绘制出成果图;而三维激光扫描系统可以在导出数据后直接在点云上进行描绘,再经简单处理就可出成果图。经比较,内业出图效率比传统作图高出3 倍以上。总体来看,三维激光扫描系统和GPS-RTK、全站仪的测绘方法相比,生产效率至少提高了5 倍以上[10],应用效果显著。
5 结束语
三维激光扫描测量技术的出现,打破了传统日照分析测量的局限性,它不再是利用皮尺、测距仪、全站仪等常规工具进行单点测量的模式,而是能对建筑物进行无接触全方位的测量,使得日照分析测量工作更加快捷、数据获取更加精确,为快速和大范围测制建筑物几何图件提供了一种全新的技术手段。
随着无人机平台的发展成熟以及三维激光扫描设备的轻量化生产,基于无人机载的三维激光扫描技术也开始崭露头角[11]未来,同时利用多平台三维激光扫描技术的一体化作业模式将使得日照分析测量更加高效快捷,届时,三维激光扫描技术的应用将更加广阔。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
金桥(2021年9期)2021-11-02
金桥(2021年9期)2021-11-02
金桥(2021年9期)2021-11-02
学苑创造·A版(2020年6期)2020-07-07
小学生学习指导(低年级)(2019年9期)2019-09-25
畅谈(2019年9期)2019-05-27
小天使·二年级语数英综合(2015年12期)2015-12-04
中国动物保健(2015年4期)2015-10-21
