基于无线传感网络的车间自动引导车通信信息定位方法
2022-10-03 05:17朱洪杰
制造业自动化 2022年9期
朱洪杰,方 允
(1.广州工商学院工学院,广州 510850;2.广东工业大学,广州 510006)
0 引言
车间自动引导车是一种不需要人工驾驶,而是由计算机对其实施行驶路线控制,进而完成车间运输工作的车间运输设备[1]。它以自动化运输的方式代替传统人工运输方式,不仅能够有效提升车间货物运输效率,还能够有效降低企业的人力资源成本。但这一切要以合理的运输路线规划为前提,而获取准确的车间引导车位置又是有效规划引导车运输路线的关键[2,3]。
近年来,国内外诸多学者对车间自动引导车通信信息定位方法进行了大量研究,成绩颇为显著。比较受欢迎的有胡悦等人基于因子图对车间引导车通信信息定位方法的研究[4]、公绪超等人基于区域判别与信息反传对车间引导车通信信息定位方法的研究[5]。二者均可实现车间自动引导车通信信息定位,但是,受其通信技术的局限性,当车间存在大量自动引导车、噪声干扰较大时,对车间自动引导车车间通信信息定位的实时性与准确性较低,因此无法更加快速准确地为车间自动引导车规划合理行驶路线,长此以往势必会造成车间运输工作效率的降低。
无线传感网络无需连线便可实现通信信息传输,由于其不需要连接任何电气设备,因而对无线传感网络的管理以及养护只需在传感网络自身区域范围内完成即可,不受其他设备的干扰,在通信信息传输工作中既保证了信息传输的实时高效性,也保证了通信信息传输的准确性。为此,本文提出基于无线传感网络的车间自动引导车通信信息定位方法,可高效准确完成车间自动引导车通信信息定位,更好满足实际工作需要。
1 车间自动引导车通信信息定位
在进行车间自动引导车通信信息定位时,通常情况下会在车间自动引导车活动范围内布置多个传感节点,从而构成用于车间自动引导车通信信息定位使用的无线传感网络[6,7]。为避免节点休眠影响通信信息传输的实时性与通信信息传输速率,基于休眠轮询机制对无线传感网络进行优化。利用优化后无线传感网络完成车间自动引导车通信信息传输。无线传感网络的传感节点通常状况下有两种类型,一种是信标节点,另一种则是未知节点。信标节点上通常会布置一些能够获知坐标位置的设备,因而,通常状况下信标节点的坐标位置是已知的。已知信标节点的坐标位置,利用一些有效的定位算法便可获得未知节点的坐标位置信息。
为此,可在自动引导车上布置一个传感器节点,将自动引导车视为所搭建传感网络中的未知节点,通过对信标节点与自动引导车上布置的未知节点执行有效的信息传输操作,再使用有效的车辆定位算法,便可实现车间自动引导车通信信息的准确定位。三边质心定位算法在进行定位过程中,只需获知三个信标节点的位置信息,便可求取未知节点的坐标信息[8]。因而,本文采用三边质心定位算法进行车间自动引导车通信信息定位。
1.1 基于休眠轮询机制的无线传感网络优化
在进行车间自动引导车通信信息定位时,无线传感网路作为通信信息传输的主要途径,其通信信息传输性能的优劣是影响车间引导车通信信息定位效果的关键因素[9,10]。通常状况下,在无线传感网络中,传感节点在一定控制周期实施相关的车间自动引导车定位信息采集以及汇聚操作后,会在一段时间内处于休眠状态,等到下一控制周期才会再次实施车间自动引导车定位信息的采集以及汇聚操作。这样不仅会增加能量消耗,还降低通信信息传输的实时性与通信信息传输速率,还会间接导致车间引导车定位实时性与效率的降低。因此,本文根据区域覆盖均衡理论,引入休眠轮询机制,按如下节点休眠轮询优化规则进行无线传感网络性能优化。
1)在无线传感覆盖区域1×1矩阵范围内,对传感节点i实施坐标位置确定操作,根据确定的坐标位置对节点进行相关扫描操作,可求得与i紧邻的节点坐标与此时节点的状态信息,用j代表相邻节点,用公式对其进行合理的定义操作:

其中,与i相邻的节点位置坐标用Locali代表;节点启动抑或休眠用Nodei代表;用于实现车间自动引导车通信信息定位的传感网络中所有传感节点所组成的集合用ω代表;用i代表当下传感节点,则其传输半径的最大值用U代表,i、j间的拓扑距离用U(i,j)代表,若i、j具有一样的网络制式,则有Ui-Uj=0。
2)按照无线传感节点规则,对所有的相邻节点完成感应工作后,当前传感节点需分辨在所有相邻传感节点中,存在能替代自己完成车间自动引导车通信信息采集以及传输等操作的节点与否。若存在一个这样的相邻节点,则使该点按照图1所示流程,利用Re_Call分组方式对当下传感节点下达通知,对其执行休眠转换操作。若没有发现能替代自己完成车间自动引导车通信信息采集以及传输等操作的节点,则将再次在下个周期实施相邻传感节点感知操作。
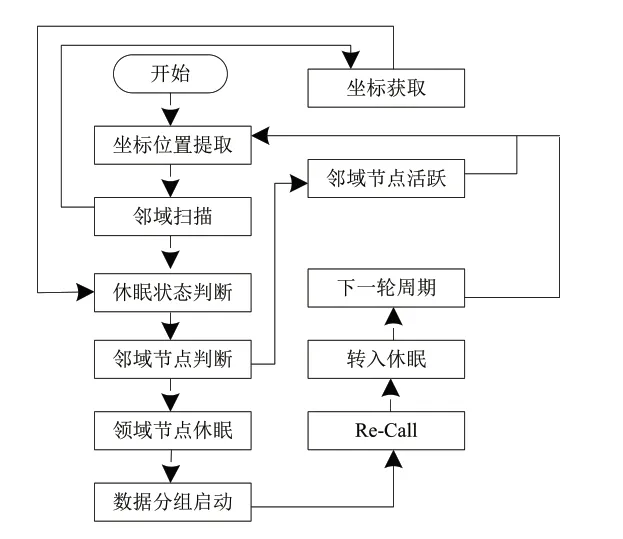
图1 相邻节点互感流程
需要指出的是,在实施相邻节点状态感知操作时,需结合当前传感网路传感节点的覆盖情况对任务取代实施合理判断操作。通常状况下,传感节点覆盖范围内包含的相邻节点数量多于2时,方能转入休眠状态。
1.2 基于三边质心算法的车间自动引导车定位
1.2.1 信标节点选择
传感网路中的信标节点会存在若干个,选择不同的信标节点进行车间自动引导车定位,对定位的结果会产生不同程度的影响。比如,若所选信标节点与未知节点间具有良好的通信性能,那么,将该信标节点应用到车间自动引导车通信信息定位的过程中,必然也会收获更为精确的车间自动引导车通信信息定位结果[11]。因而,是否能够挑选出合适的信标节点参与到车间自动引导车通信信息定位工作尤为重要。对信标节点的选择可遵循以下原则:
1)挑选与车间自动引导车之间距离值较小的信标节点进行车间自动引导车通信信息定位。为了能够快速挑选出用于车间自动引导车通信信息定位的信标节点,可以设定一个比较合理的距离阈值,在这个距离阈值范围内完成车间自动引导车通信信息定位信标节点的选择。未知节点与各个信标节点间的距离计算可通过RSSI算法的距离测量原理来实现[12]。
在RSSI算法中,想要实现信标节点与未知节点间的距离计算首先需要构建衰减模型。
用公式可将Free-Space模型表示为:

其中,信道的衰减、测试点到信源之间的距离分别用Loss与d代表;信号的频率用f代表;衰减因子用k代表。
在实际的RSSI测距工作中,Free-Space模型所描述的情形过于理想,其存在是不现实的[13],但是,在进行RSSI距离计算时,Free-Space模型确是很好的参照标准。
用公式将Log-distance Distribution模型表示为:

其中,距离为d的接收节点上的信号衰减用PL(d)代表;均值是0的高斯白噪声用Rσ代表,通常情况下Rσ满足4<Rσ<10;d0代表近地距离;PL(d0)代表经过距离d0后所有可能路径的平均消耗。
用公式将信号衰减值的求解过程表示为:

其中,接收信号强度用RSSI代表。
通过上式求解出PL(d)后,对PL(d)执行向式(4)的代入操作,若让d0=1,对其执行向式(3)的代入操作,可获取PL(d0)的值,再次执行PL(d0)向式(4)的代入操作,可获得想要求解的距离值。
2)选择与未知节点具有良好通信性能的节点作为用于车间自动引导车通信信息定位的信标节点。
当要进行车间自动引导车通信定位时,布置于引导车上的未知节点会向信标节点执行若干次的BLAST包发送操作,信标节点按照发送过来的BLAST包,实施RSSI计算操作,并将获得的值向未知节点发送。若信标节点能够获得BLAST包的最高次数为N,当信标节点获得的BLAST包次数与N的差值最小时,视该信标节点与未知节点具有良好的通信性能。
1.2.2 三边质心测量定位法原理
用A、B与C分别代表在布置在车间自动引导车活动区域的无线传感网路中选中的信标节点,用Q代表未知节点的坐标,即车间自动引导车位置坐标。将用于车间自动引导车定位的A、B与C、Q四个节点的坐标分别表示为(xa,ya)、(xb,yb)、(xc,yc)与(x,y),信标节点A、B、C与Q间的距离用da、db与dc代表。将A(xa,ya)、B(xb,yb)、C(xc,yc)视为圆心,同时将da、db与dc视为半径,实施做圆操作,理想状况下的结果如图2所示。

图2 三边定位算法理想状况
对车间自动引导车的定位,可通过求解Q点的坐标位置实现。根据A(xa,ya)、B(xb,yb)、C(xc,yc)以及da、db与dc有:

其中,从A、B与C至Q的距离分别用da、db与dc代表。
通过式(6)可获得自动车间自动引导车在其活动区域的定位信息,但是,在实际的车间自动引导车通信信息定位工作中,这种理想状态存在的概率极低[14,15],将A(xa,ya)、B(xb,yb)、C(xc,yc)视为圆心,da、db与dc视为半径,实施做圆操作获得的圆未必会相交于一点,具体如图3所示。

图3 三角质心算法
图3中,将A(xa,ya)、B(xb,yb)、C(xc,yc)视为圆心,da、db与dc视为半径,实施做圆操作后,获得的圆的交点用D、E、F代表,将D、E、F视为三角形顶点,构建三角形ΔDEF,该三角形的质心坐标即可被视为对Q执行估计操作获得的坐标位置。
用(xd,yd)、(xe,ye)与(xf,yf)分别代表点D、E、F的坐标值,通过求解式(7)可获得D、E、F的坐标位置。
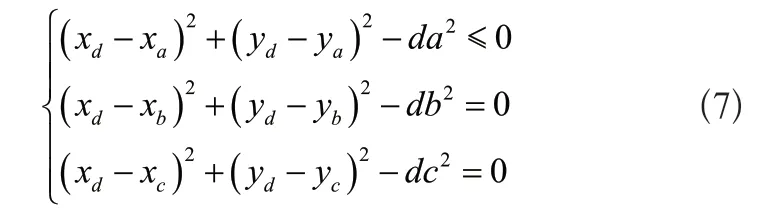
根据式(7)获得D、E、F的坐标值,可实现对点Q坐标的求解,Q点的横纵坐标可通过下式进行求解。

2 实验与分析
以某大型纺织厂纺织车间的自动引导车为实验对象,采用本文方法对其进行车间自动引导车通信信息定位,验证其在车间自动引导车通信信息定位方面的优势。
表1是应用本文方法进行车间自动引导车通信信息定位获得的车间自动引导车通信信息定位结果。其中1号自动引导车的定位结果如图4所示。
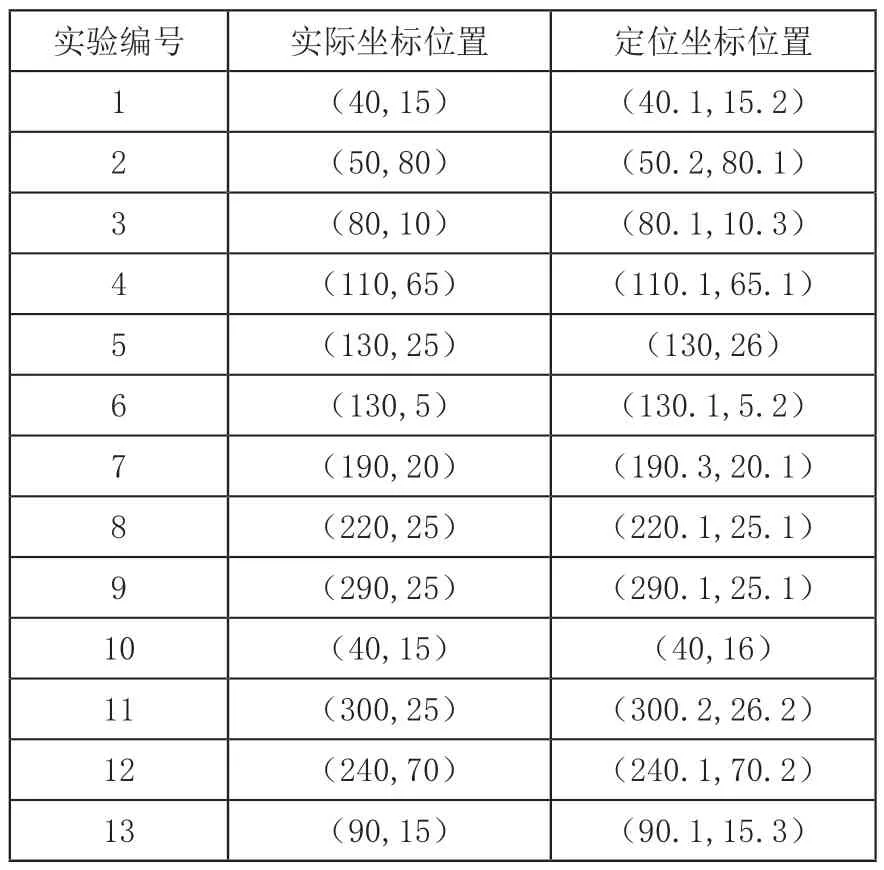
表1 车间自动引导车通信信息定位结果

图4 1号自动引导车的定位结果
从表1可以看出,应用本文方法可实现车间自动引导车通信信息定位,并且定位坐标位置与实际坐标位置基本一致,准确性较高,由图4举例定位结果可以看出,本文方法能够清晰获取车间自动引导车的在车间中的具体位置,更好满足实际工作需要。
在选择信标节点时,对未知节点到信标节点距离测量的准确性,决定了是否能够获取合适的信标节点,用于车间自动引导车定位。图5是在三组实验中,应用RSSI算法对不同信标节点到未知节点距离进行计算获得的测距结果。

图5 RSSI测距结果
分析图5可知,三组实验中应用RSSI算法对不同信标节点到未知节点距离进行计算获得的距离曲线与实际距离曲线几乎完全重合。说明:利用RSSI算法获得的未知节点与信标节点之间的距离值准确性较高,将其应用于车间自动引导车通信信息定位工作中,可收获较好的车间自动引导车定位效果。
图6统计的是该厂用于货物运输的4辆编号不同的车间自动引导车,分别应用本文方法、文献[4]基于因子图的车间引导车通信信息定位方法、文献[5]基于区域判别与信息反传的车间引导车通信信息定位方法完成车间自动引导车通信信息定位后每小时的货物运输量。

图6 不同方法货物运输量
图6中,应用本文方法对车间自动引导车进行通信信息定位后4辆编号不同的车间自动引导车每小时的货物运输量均要高于使用其他两种方法对车间自动引导车进行通信信息定位后的货物运输量。究其主要原因是采用本文方法对车间自动引导车进行通信信息定位后,定位的效率以及准确性都得到了提高,这使得对车间自动引导车运输路线的规划效率也相应地得到提升,车间引导车在相同的时间内可以完成更多的货物运输任务。
车间是完成货物生产与运输的场地,因而,不同于其他环境,会有不同程度的噪声存在,噪声的存在可能会对车间引导车通信息定位的准确性产生不利影响。因此,为验证本文方法在车间自动引导车通信信息定位方面的优势,绘制在不同信噪比环境下,应用本文方法进行车间自动引导车通信信息定位时产生的误差对比图如图7所示。

图7 不同噪声环境定位误差
根据图7显示,应用本文方法对车间自动引导车进行车通信信息定位时,在不同信噪比环境下获得的定位误差均较低,三条误差曲线大部分均接近重合。实验证明:即使在运输环境比较复杂的情况下,应用本文方法对车间自动引导车进行通信信息定位时产生的误差值也非常低,这再一次验证了本文方法的正确性与准确性。
在进行车间自动引导车通信信息定位时,会相应地产生不同程度的能量消耗,而产生的能量消耗多来自于用于通信信息的传输过程。为验证应用本文方法对车间自动引导车进行通信信息定位时,在能量消耗方面的优势,绘制引入休眠轮询机制前后无线传感网络在不同传输数据量下的能量消耗对比图如8所示。
引入轮询机制前后,在传输数据量低于150个时,所消耗能量并无很大差别,但是当传输数据量超过150个时,引入轮询机制后,数据传输时所消耗的能量明显要低于未引入轮询机制时所消耗的能量:在对车间引导车进行停车区域状态信息传输时,在采集数据量较大情况下,本文方法在能量消耗方面更具优势。同时,在图8中还可以看出,引入轮询机制后,轮询周期设置在10s以下以及10s以上时,所消耗的能量要高于轮询周期设置为10s时很多,因而,在本文中,将轮询周期设置为10s,对自动引导车停车区域状态信息进行传输,可以以更低的能量消耗完成车间自动引导车通信信息定位。
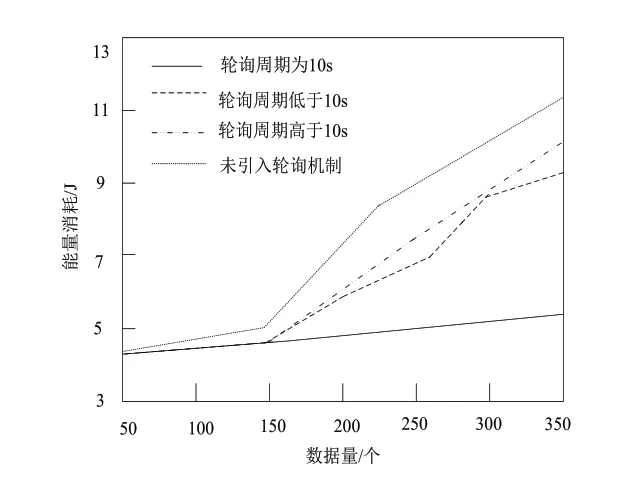
图8 能量消耗对比图
绘制引入轮询机制前后使用无线传感网络对用于车间自动引导车定位的通信信息进行传输时,获得的传输效果对比图如图9所示。

图9 通信信息传输效果对比图
在信号干扰较小的情况下,即信噪比大于50dB时,引入轮询机制前后对用于车间自动引导车定位的通信信息进行传输时获得数据传输曲线基本完全重合;在信号干扰较大的情况下,即信噪比低于50dB时,引入轮询机制后获得的数据传输曲线只是产生一些非常不明显的波动,而未引入轮询机制时获得的数据传输曲线波动非常明显。结果表明:在信号干扰较大情况下,本文方法在通信信息传输方面更具优势。
3 结语
应用本文方法可实现车间自动引导车定位,并且定位效果较好。其在车间自动引导车定位方面的优势主要表现为:
1)在噪声干扰较大情况下,应用本文方法仍然可以对车间自动引导车进行准确定位,定位后,自动引导车运输路线规划的效率得到显著提升,自动引导车可更快完成运输任务。
2)在应用本文方法进行车间自动引导车定位时,只需消耗较少的能量与时间便可完成车间自动引导车定位,可更好满足实际工作需要。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
智能制造(2021年4期)2021-11-04
舰船科学技术(2021年7期)2021-08-11
农村农业农民·B版(2018年11期)2018-01-28
分析化学(2017年12期)2017-12-25
分析化学(2017年12期)2017-12-25
现代电子技术(2017年11期)2017-06-12
南方周末(2016-12-19)2016-12-19
发明与创新·大科技(2016年5期)2016-05-17