基于参数化与3D打印的智能陪护机器人设计
2022-10-01 09:30焦洁
数字制造科学 2022年3期
焦 洁
(武汉华夏理工学院 艺术设计学院,湖北 武汉 430060)
目前我国正面临着人口老龄化带来的种种社会问题,其中最为突出的是养老和医疗保障问题,有关住院患者的陪护管理问题还有待进一步完善[1]。各大医院普遍存在医护人员配置不足的问题。我国病情严重的患者在住院期间普遍需要家属陪护或者雇佣护工,患者对陪护的现实需要和医护人员配置不足形成了矛盾。因此,衍生出了“机器助人”的需求。
1 智能陪护机器人的设计目标与功能
国内大部分病房没有配备系统的智能陪护设备,陪护设备缺少规范化管理,医院病区存在探视人员、陪护人员过多的情况。在医疗陪护管理中存在的主要问题包括:①医患间的沟通交流有待加强;②普通病房患者的陪护管理工作需要更加智能化、更加系统规范。基于此智能陪护机器人的目标要求如下:①加强医患间的信息沟通交流,让医护人员实时远程了解住院患者的各项监测数据,根据不同住院患者的具体情况,医护人员可以将患者需要了解的病情发展、治疗注意事项等信息通过智能陪护机器人让患者了解;②让住院患者的饮食起居更加方便安全;③提高医护人员、陪护人员的工作效率,减轻工作负担。
机器人使用于住院病房内,主要活动于患者床周。使用人群包括医院工作的医护人员、住院患者和陪护人员。机器形态以直线为主结合轮式移动有利于清洁消毒以及移动。机器人的色彩定位为中性颜色作为主色调,颜色种类简单,使产品可以融入大部分医院环境的设计之中[2-3]。
智能陪护机器人要具备6大功能:①智能监测功能是指可以通过外挂设备监测患者血压、血氧饱和度、心电、呼吸、输液、体温6项数据[4]。②医患信息共享功能是将监测到的患者信息通过无线网络传输到医护人员设备端,医护人员根据不同患者的情况需求将病情发展、治疗注意事项、治疗方案利用无线网络传输显示在智能陪护机器人的显示屏上让患者查看。③床旁提醒功能是指智能陪护机器人可以提醒患者服药、提醒患者做检查的项目与时间、对于有要求控制睡眠时间的患者设置闹铃提醒、输液结束时会发声提醒。④提供共享陪护床供陪护人员休息使用。⑤机器人可以搀扶患者行走和起立。⑥对于需要进行饮食控制的患者,机器人可以称重。
2 智能陪护机器人方案设计
智能陪护类机器人主要由三大组成部分,每个组成部分包含两个子系统,如图1所示。
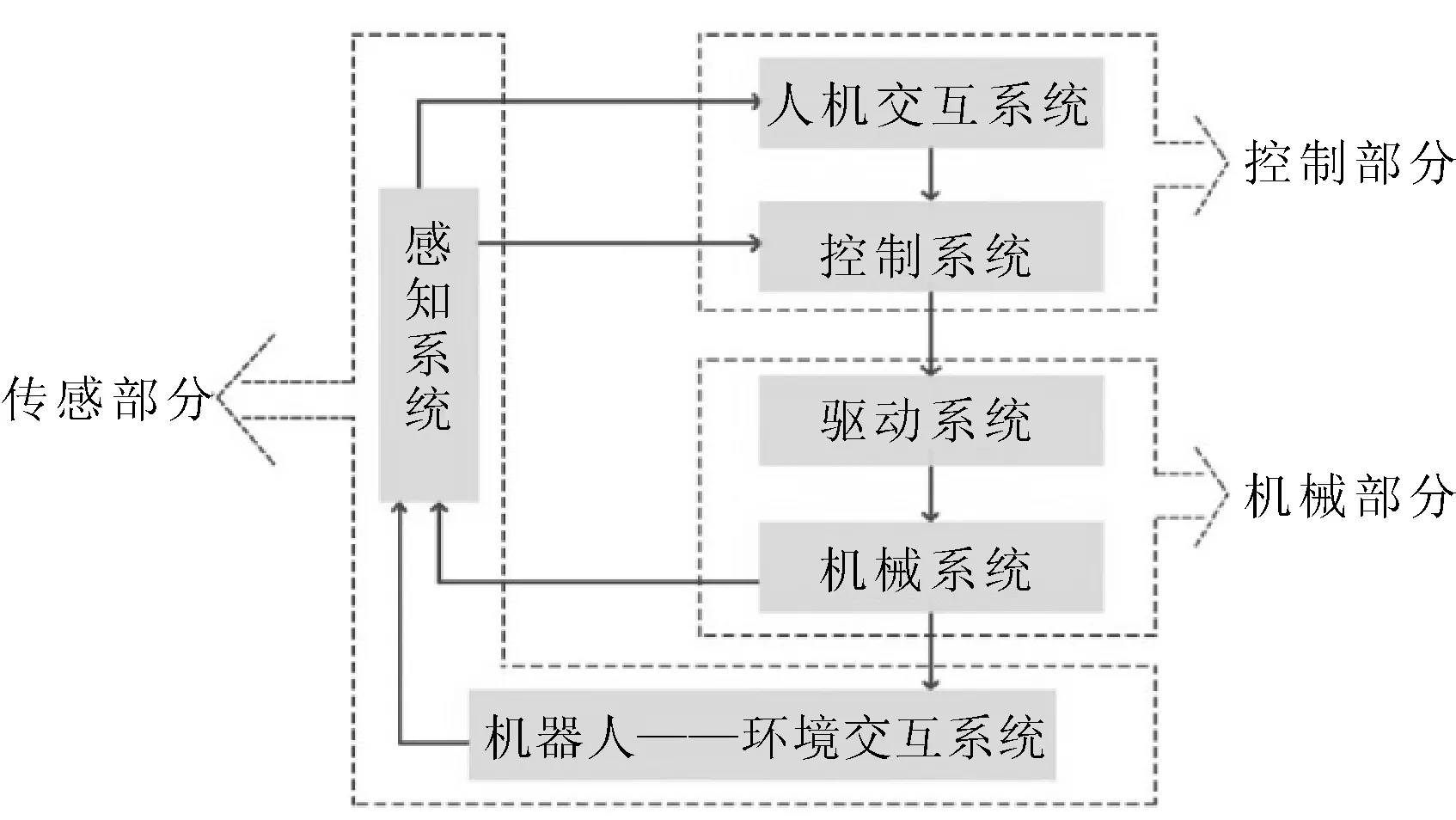
图1 智能陪护机器人的基本组成
机械系统包括智能陪护机器人的机身、行走机构、手腕、手臂等部件[5-6],机械系统的基本部件都是可以活动的。部件组合在一起可以进行多角度自由活动。传动机构和驱动器都属于驱动系统,在机器人的系统设计中与执行机构相连,机器人驱动系统所发挥的作用和人体的肌肉作用相似。机器人中的人机交互系统是使用者与机器人之间进行联系的装置,当使用者想操控机器人时可以通过人机交互系统实现。控制系统是通过作业指令及反馈信息支配执行机构完成规定动作的处理单元。传感器属于感知系统,机器人上安装的传感器需要把采集的信息传输给控制部分。如果要完成智能陪护机器人与其他设备的联系、协调,就要通过机器人的人机交互系统才能实现。智能机器人就是通过这些子系统的运作完成各类服务功能的。
3 智能陪护机器人的参数化设计
3.1 参数化设计流程规划
参数化产品的设计与常规产品设计的过程有所区别,其过程注重逻辑推导。设计者根据构思目标,确定相关影响因素并将因素进行转化,设定出确定变量。产品投入使用的病房可活动范围与病床高度、床间距是智能陪护机器人的主要影响因素,因此将智能陪护机器人的台面高度、陪护床长度、整机宽度和厚度的数据编辑设为变量。利用算法构建参数关系并生成设计原型[7],修改关键关联变量,对造型进行约束的同时生成大量系列方案,评估后确定最佳形态,其执行流程如图2所示。

图2 参数化产品设计流程
3.2 机器人关键参数确定
参数化设计可以通过计算机生成规范的三维模型,并且可以在已经搭建好的数据中改变参数,得出适合于不同需求的不同规格模型。尤其对于有数控加工要求的产品,可以提高模型生成效率,减少设计师不断重复修改模型外观的时间,将时间投入到技术研发、交互信息、运动结构等方面的研究。参数化设计利用程序化的参数对产品的造型进行约束后就可以根据需求生成不同外壳和零件,从而加快更新速度也更好地适应陪护机器人的多样化要求。针对不同病房环境的空间尺寸和不同陪护人员的需求,可以利用变量驱动各个部件的尺寸。由于不同病房的病床高度、床间距和可活动范围都有所不同,因此智能陪护机器人的台面高度和整机宽度需要根据不同的空间进行调整,以保证机器人在病房内的活动空间和使用人员的使用感,陪护机器人外形的长宽高可以通过参数化设计,设置为可调节的变量,以适应不同病房的空间要求。
国内病房中病床的床间距与陪护床所需最小宽度,是设置机器人外形尺寸的重要依据。国内使用率最高的多为两人病房与3人病房,经过调研武汉市5家医院的两人病房与三人病房的空间尺寸,病床间的间距在80~100 cm之间;根据《中国成年人人体尺寸》中统计的我国成年人身高、最大肩宽,陪护床的最小宽度须达到50 cm。因此,使用参数化设计平台对智能陪护机器人的外形尺寸范围进行初步设定,将X1、X2、X3设置为变量,可以根据具体病房空间大小进行一定范围内的修改,如图3所示。
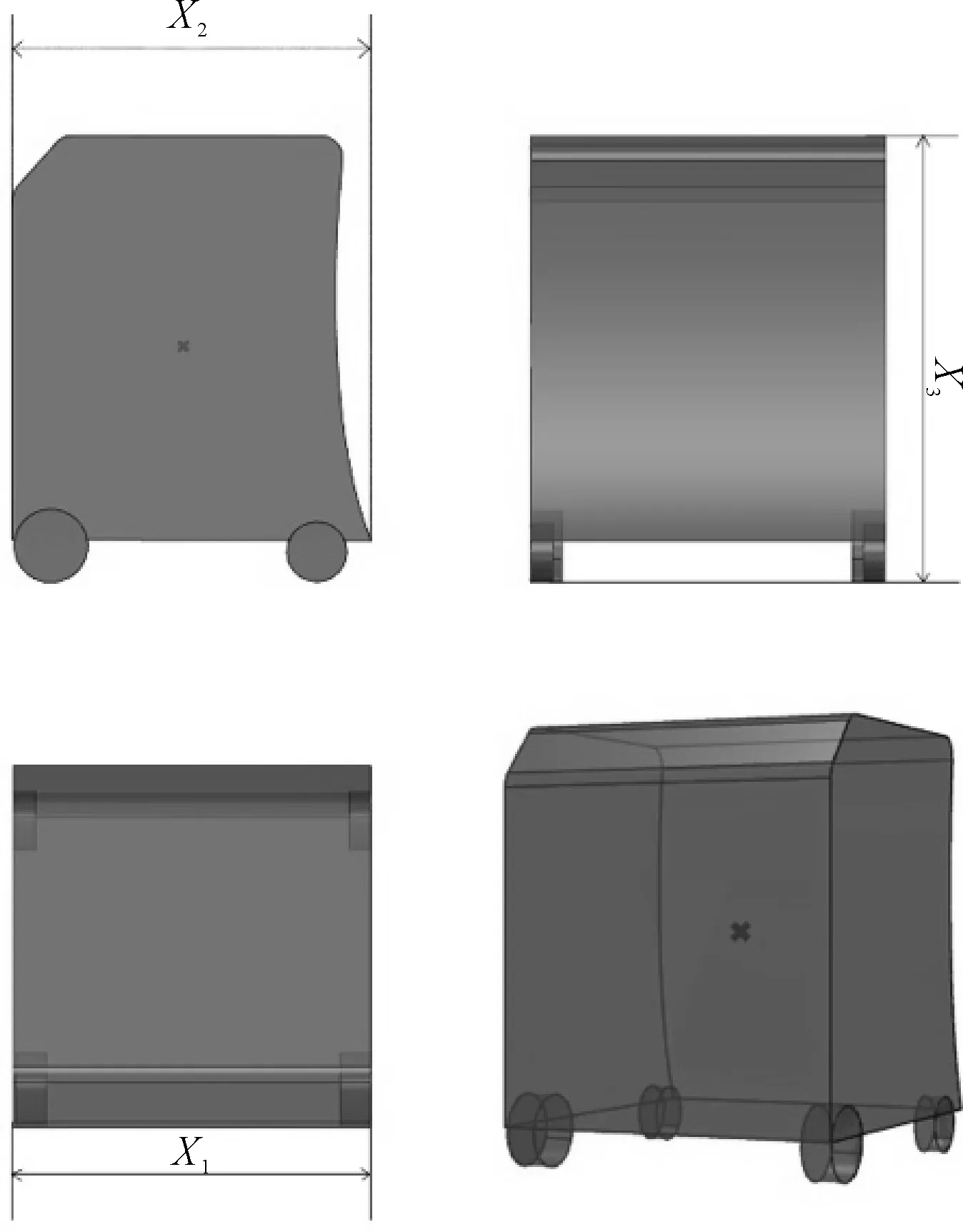
图3 智能陪护机器外观设计中的变量数值
根据调研所得的机器人外形尺寸依据,在参数化建模平台中将机器人外形宽度X1、厚度X2、台面高度X3作为参数化模型中的变量数值,X1、X2、X3的变化范围分别为60 cm≤X1≤100 cm、65 cm≤X2≤80 cm、80 cm≤X3≤100 cm,如图4所示。在参数化建模平台中在给定范围调整各项变量数值,即可根据不同病房的空间尺寸,生成出更为人性化的机器尺寸。
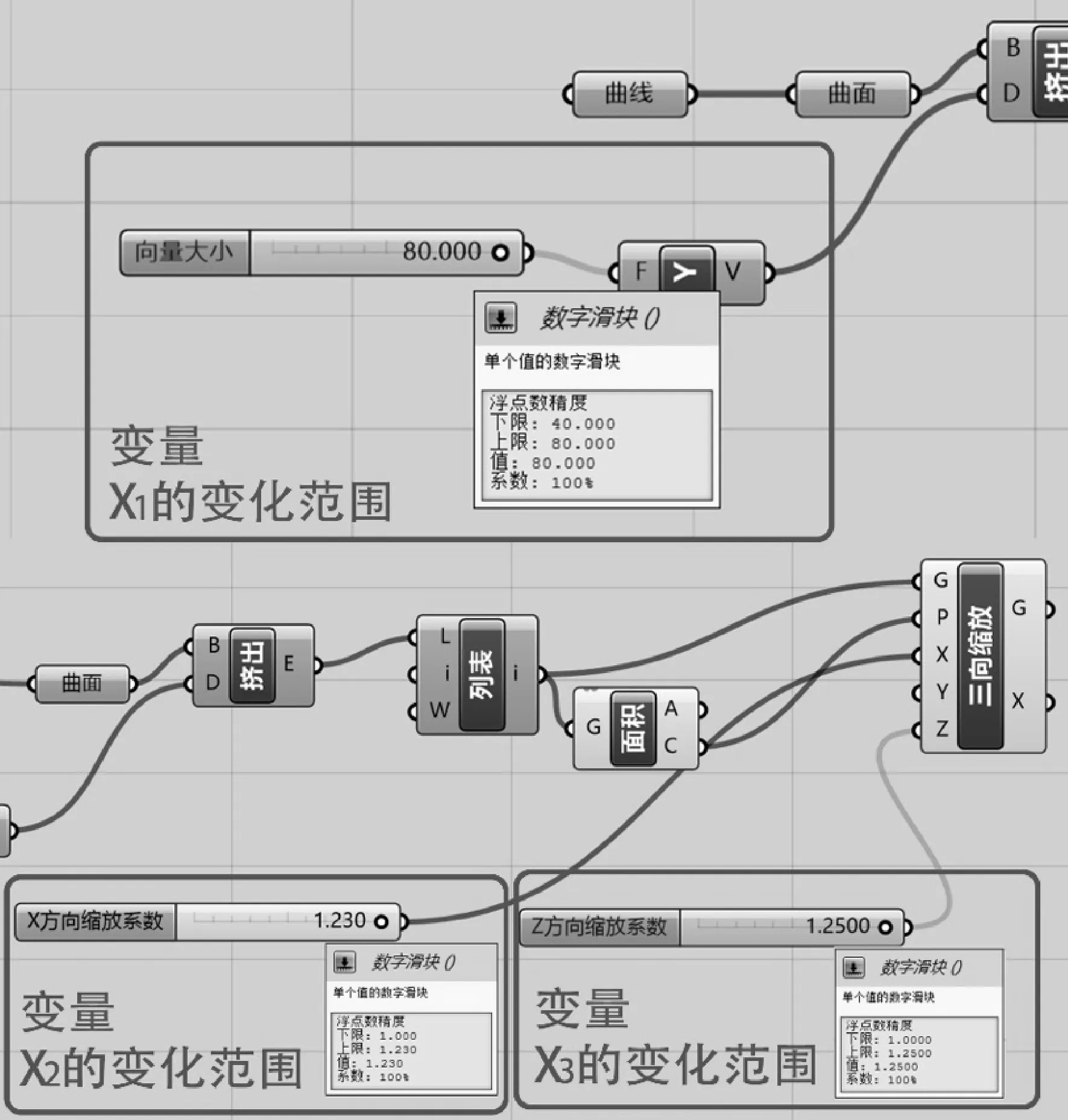
图4 参数化模型中的变量数值范围
3.3 参数化逻辑建立与优化
使用“Rhino+Grasshopper”组成的参数化设计平台[8],进行智能陪护机器人的参数化设计。Grasshopper插件是在Rhino环境下运行并采用程序算法生成模型,数据结构为树状数据,将指定命令输入到“电池”状的运算器中就可以生成出数据,再连接到下一个“电池”运算器中环环迭代,计算机生成出最终模型形态,并且输出的结果模型具有一定的可调性。基于对智能陪护机器人外观尺寸设置的变量数值X1、X2、X3的变化范围,进行进一步的模型优化,完成智能陪护机器人的参数化建模,其效果图如图5所示。
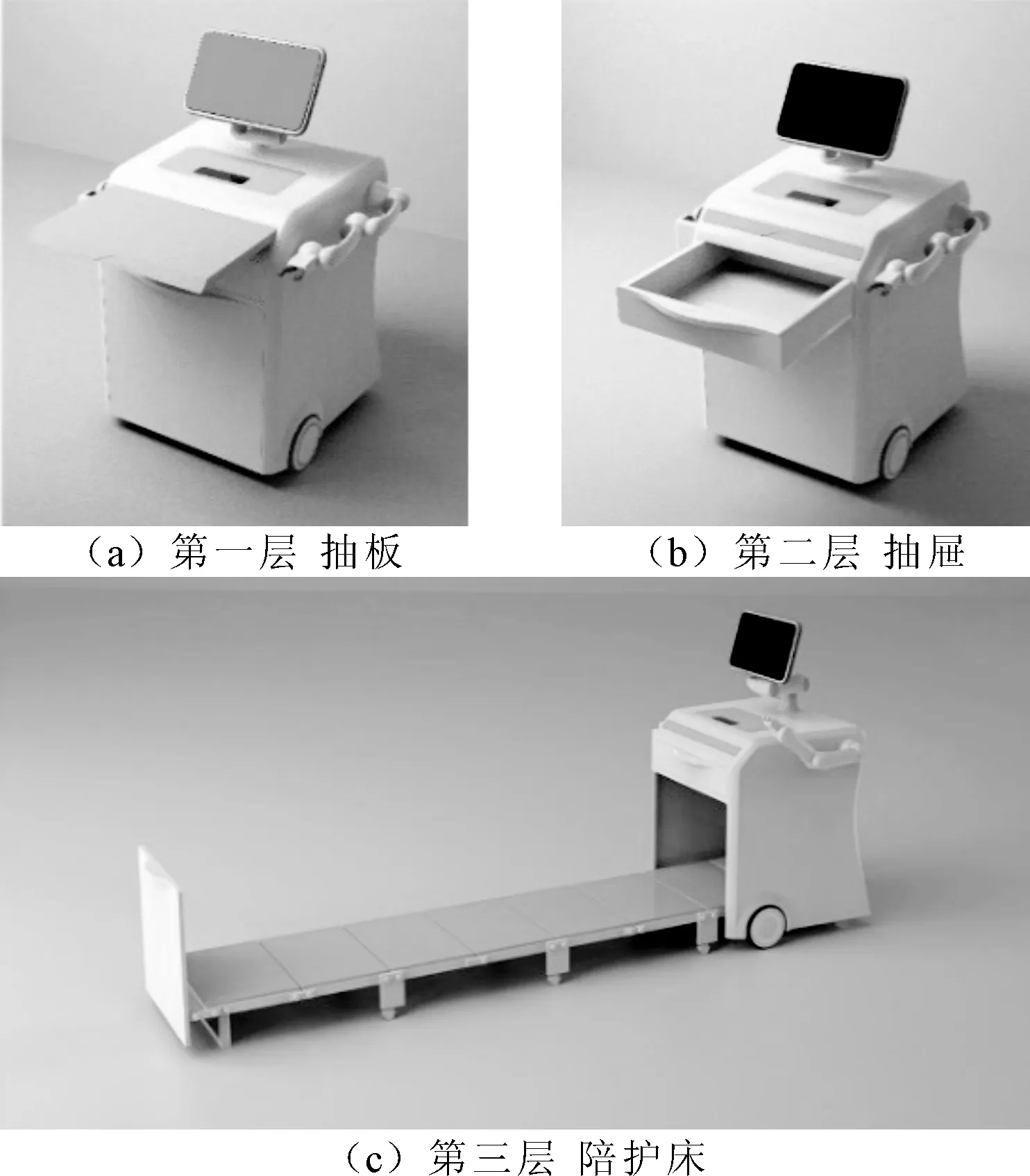
图5 智能陪护机器人模型效果图
4 智能陪护机器人的3D打印
4.1 3D打印材料选择
PLA塑料是使用可再生的植物资源所提取的淀粉原料制成。由于人们对生活品质和健康的追求,以及市场对塑料的安全、环保要求的提高,人们将PLA材料作为生产产品的选择之一。与同等数量的石油基聚合物相比,PLA 材料的生产过程最高能减少70%以上的二氧化碳排放。厨房、餐厅中的许多产品可以使用PLA塑料制作。
光敏树脂也是3D打印的可用材料,其中硬性树脂材质有更强硬、耐用的特性[9-10]。光硬化树脂一般采用光聚合成型打印机打印。柔性树脂的性能表现为中硬度、耐磨、可反复拉伸,被用作铰链和摩擦装置较多。弹性树脂在高强度挤压和反复拉伸下表现出优秀的弹性。
3D打印金属材料的状态常为粉末状、丝状等,如金属粉末、金属丝以及金属箔等。材料种类包括钛合金、铝合金、钢铁材料等。使用较多的金属材料有316L不锈钢、AlSi10Mg铝合金材料、Ti6Al4V钛合金材料。金属类材料的打印成本较高。
根据3D打印材料的性能以及本文智能陪护机器人的打印要求选择光敏树脂作为打印材料。
4.2 3D打印工艺的选择
3D打印的过程总的来说分为三步,首先进行三维模型设计,然后打印机进行切片处理,最后完成打印。切片处理时打印机需要读取三维模型的横截面信息,然后将模型进行逐层分割并打印,利用各种方式将每个截面间粘合起来,就可以形成实体模型。由于3D打印可以采用的材料多种多样,因此3D打印的工艺技术也有多种类型。使用较多的包括熔融沉积成型、选择性激光烧结成型、光固化3D打印成型等。
熔融沉积成型是制作3D打印产品模型较多的工艺,将一些丝状材料,如蜡、ABS、尼龙等材料加热熔化后成形的方法。此类工艺的原理是由计算机控制,喷头进行运动,丝材被加热到融化后从喷头挤出,如图6所示。现今的新型设备增设了双喷头,其中一个用于沉积模型材料,另一个用于沉积支撑材料。这种方法有效的加快了制作效率。熔融沉积成型工艺的特点在于打印速度快,并且由于没有化学反应出现在模型打印的过程中,因此成型的模型变形率小。但熔融沉积成型工艺打印出的物品表面较为粗糙,需要进行抛光处理。
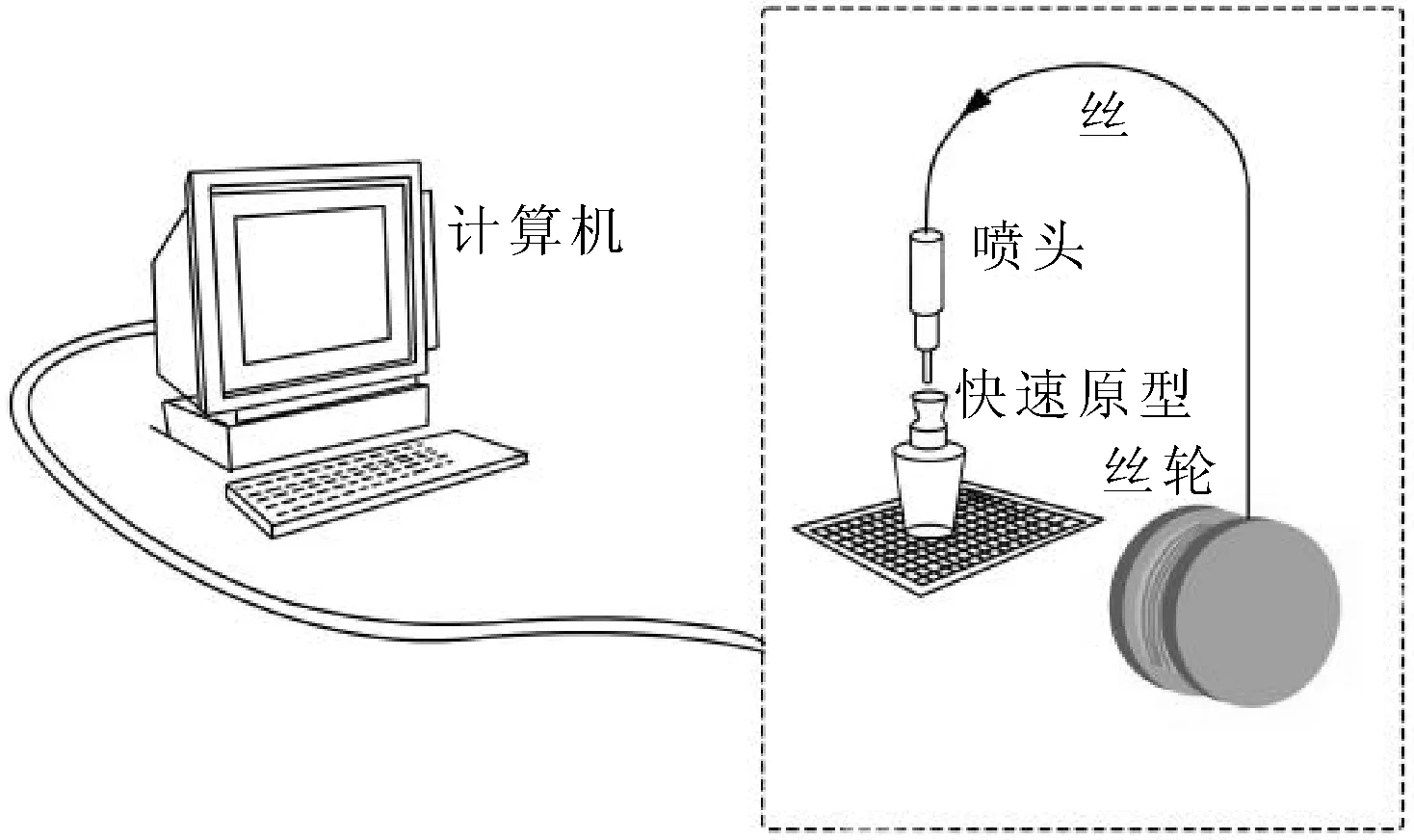
图6 熔融沉积成型工艺
选择性激光烧结工艺的原材料为各类粉末材料,设备是利用激光分层烧结原材料固体粉末,工作台在一层截面烧结完成以后会下降一部分,然后由辅料棍叠加粉末后继续烧结。层层叠加形成坚固的材料。工艺操作流程涉及软件建模、数据处理、铺粉、烧结和加工等。选择性激光烧结工艺制作的模型表面有分层状感觉,后期需要进行打磨处理,并不适合生产尺寸过大的产品模型。
光固化成型技术使用的材料是液态的光敏树脂,机器对材料照射一定波长和强度的紫外光,使材料由点到线,由线到面凝固,然后逐层叠加后形成模型整体。该工艺的优势在于稳定性与效率高,成型的模型表面较为光滑,对于本身结构复杂的模型也可以进行打印。缺点在于使用的原材料价格和机器的维护较为昂贵,以及最终成型模型的强度有限,当模型承受重量过大时会出现一定程度的变形。形体较小并且结构精致的模型可以采用光固化成型技术,但大型模型并不适合采用光固化成型技术。
4.3 智能陪护机器人的3D打印实践
通过在Grasshopper软件中的数据逻辑构建与计算机运算,验证参数化建模的智能陪护机器人方案具有一定的可行性。根据前期对3D打印不同工艺特点的调查分析,选择熔融沉积成型工艺进行打印加工,在完成模型造型打印的同时使模型也具有一定的承压能力,但打印出的模型表面仍需要进行打磨处理。将三维模型导出STL文件格式后进行打印实验。参数化智能陪护机器人的模型打印效果如图7所示。陪护床结构为8折,达到折叠收纳要求。机身各个部件的大小比例可行。
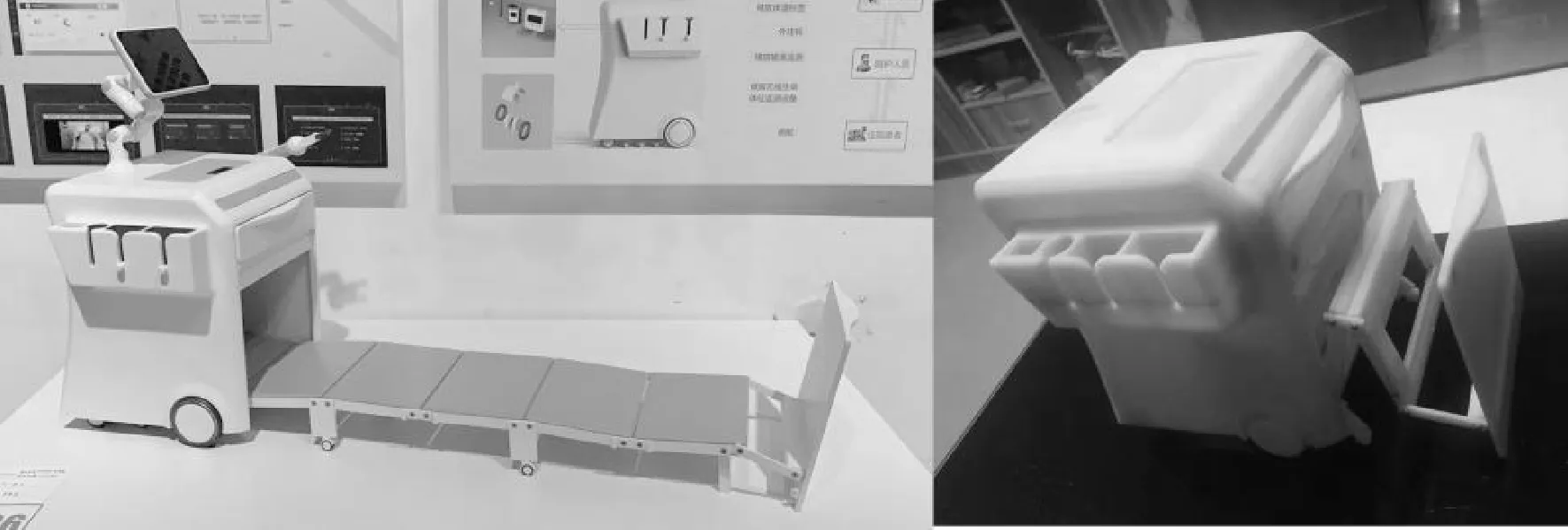
图7 3D打印效果
5 结论
参数化设计提高了设计师在进行方案设计时的工作效率,通过3D 打印模型对设计方案进行验证,检测结构模型的可行性。此外,3D打印的材料和工艺还有待进一步的探索,通过对打印技术和材料的探索研究减少制作成本,将会增大参数化设计和3D打印产品的发展空间。后疫情时代在医疗领域将会更加注重安全防范,需要继续优化智能陪护机器人的远程操控系统,保障卫生安全的同时加强医患间的交流沟通。
猜你喜欢
橡塑技术与装备(2022年6期)2022-06-02
中国典型病例大全(2022年11期)2022-05-13
汽车实用技术(2022年5期)2022-04-02
建材发展导向(2021年11期)2021-07-28
当代陕西(2019年7期)2019-04-25
躬耕(2017年8期)2017-08-30
小星星·阅读100分(高年级)(2015年12期)2015-12-28
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07