
敌我识别系统对空管监视的需求分析
2022-09-26 04:17:52曾湘洪苟玉玲
数字技术与应用 2022年9期
曾湘洪 苟玉玲
1.四川九洲空管科技有限责任公司;2.四川九洲电器集团有限责任公司
多传感器信息融合是敌我识别系统对民用或中立目标进行有效识别的手段,其中空管监视的信息是最重要的辅助信息。本文重点对空管协作监视的优点、限制条件和在敌我识别系统中应用需求进行梳理和分析,并对应用前景进行展望。
1 多属性识别需求
根据航空数据显示,由于敌我识别系统未能有效识别到民用飞机,现今为止被误攻击而造成的损失及人员伤亡数据巨大[1],这不仅会产生严重的人道危机,改变民意和舆论走势,引发事态发生逆转,甚至影响当时的政治格局。这使得在局部冲突、热点区域、敏感空域内,通过多传感器信息融合来判辨中立或民用目标变得极为迫切。尤其是在没有完善空管空防一体化系统支撑的独立系统,以及较易在陌生地域、突发空情或敌方人为干扰等情况下造成装备操作人员的误判。
2 敌我识别简介
民用二次监视雷达(SSR)起源于西方体制敌我识别(IFF),其中民用模式A与军用模式3具有完全相同的特点,通常称作3/A模式[2]。美国研制的模式5虽然采用了先进MSK调制技术、扩频技术、数据链路传输技术、计算机现代加密技术等,但询问载频为1030MHz,应答载频为1090MHz,仍与空管监视使用相同频段,兼容二次监视雷达功能(如表1所示);而以俄罗斯为代表的东方体制敌我识别器需根据不同的识别路线和工作状态使用不同的波段或波段组合,除非特殊要求,一般不兼容空管二次监视雷达(SSR)功能。这使得继承前苏联制式的武器控制雷达对民航目标探测识别具有先天不足;同时在冲突地区的敌我识别设备一般处于无线电静默状态,也会对突发的空情属性进行误判。
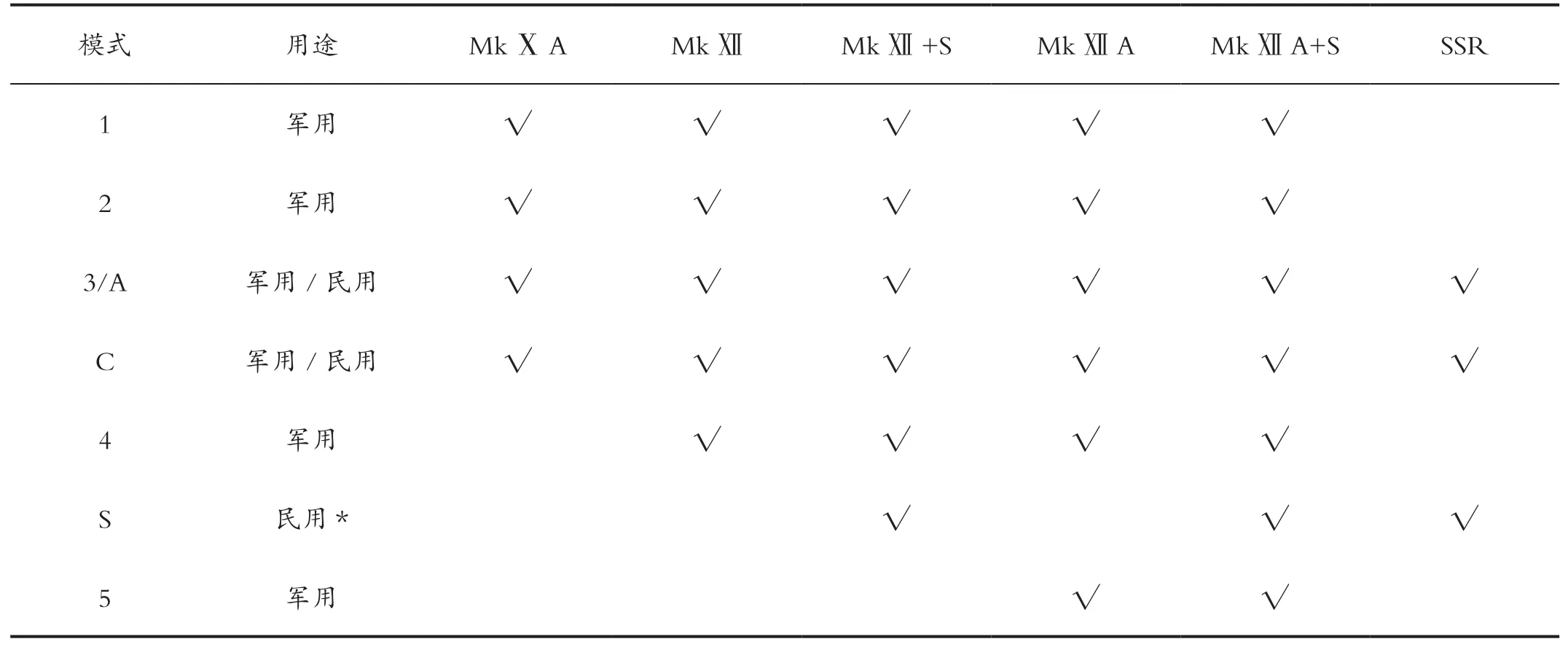
表1 主要西方体制敌我识别器模式对比Tab.1 Comparison of main western IFF modes
3 空管主要监视技术
用于民航的空中交通管制(ATC)监视技术手段较多,一般可分独立监视和协作式监视。独立监视通常也称为非协作式监视,一般是指地面设备不依赖空中目标发送的信息进行自主监视,如:航管一次雷达[3]。本文主要对空管的协作式监视在敌我识别中的应用进行讨论,空管协作式监视主要通过如图1所示获取民航目标的信息。
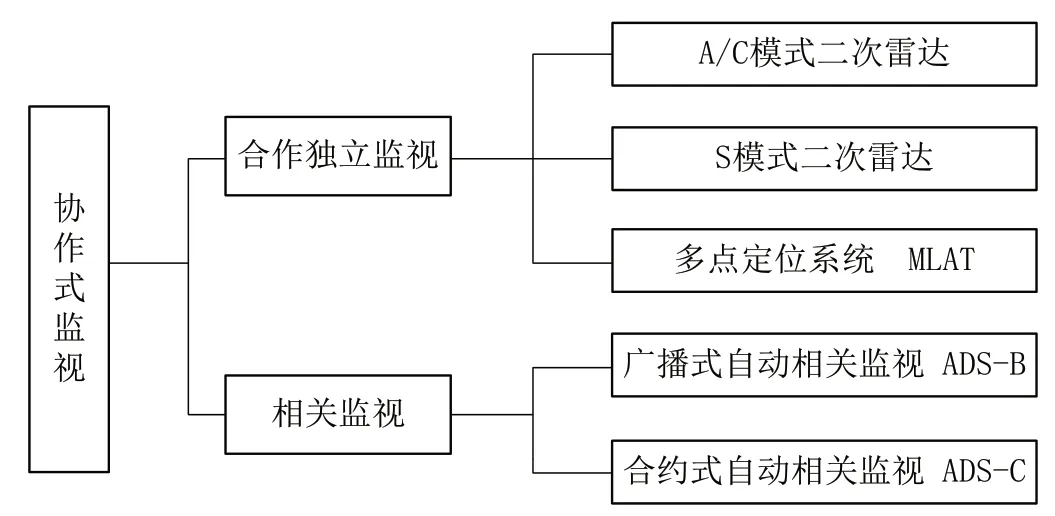
图1 空管协作式监视主要手段Fig.1 Main means of ATC cooperative surveillance
4 空管协作式监视特点
由于A/C模式、S模式已在西方体制敌我识别器中普遍采用,而ADS-C采用点对点的通讯方式,需航空器直接与管制单位之间建立点到点的通讯连接,一般在其他监视手段不可行的区域提供监视,本文不对上述监视模式或手段进行累述。
ADS-B由机载星基导航和定位系统生成精确的航空器及其他移动目标自身定位信息,通过特定数据链和格式进行周期性自动监视信息广播,并由特定地面站设备和(或)其他航空器进行接收和处理,以实现监视功能[3]。ICAO推荐使用的1090ES数据链主要利用S模式的DF17和DF18进行信息传输。可以实时获取目标的主要广播信息,包括飞机标识、飞机类别、三维位置、三维速度等状态信息,以及紧急状态、航迹角、航迹拐点等附加信息[4]。消息广播间隔时间为0.4~0.6s之间。
MLAT采用到达时间差定位技术,通过测量、处理目标应答信号(A/C/S/1090ES/TCAS等)到达多个基站的时间差来实现目标定位,满足管制监视需求[3]。分为机场场面多点定位(ASM)系统和广域多点定位(WAM)系统,对航路目标监视采用广域多点定位系统。可以获取飞机的高度、速度等识别信息,同时可以人工设置上报信息的刷新速率[5],一般每秒数据更新一次。
虽然ADS-B和MLAT目标信息刷新率高,目标信息丰富完整,但其探测范围受视距和地形地物等因素限制。地形地物对无线电信号的反射和遮挡,会直接影响其覆盖能力,同时MLAT还会受地面站的布局影响。为最大限度的发挥其性能,对场地设置及环境都有明确的要求:ADS-B地面站应满足空域覆盖、设在开阔地带,四周无严重的地形地物遮挡,同时还要考虑测试信标和合装设备间电磁影响;MLAT地面站除需满足对监视区域的精度和覆盖要求,作用区域内应无严重的地形地物遮挡,同时还要考虑询问区域覆盖、接收机间同步和合装设备间电磁影响[6]。以上这些要求限制了两者在极端环境下的应用,降低系统性能的正常发挥。
5 空管监视在敌我识别中的应用
由于现代战争具有突发性、力量非对称性、任务多样性等新特点,无法有效依托各国完整的空防空管一体化系统[7],必须依靠装备自身的侦察监视手段,采用成熟可靠的数据源对目标进行精准识别,适时处置各种空情。敌我识别装备可配合一次雷达进行可疑目标的属性识别,与空管监视的目的要求有显著区别,需对空管监视手段进行优化整合后才能更好的服务于目标识别。
敌我识别器为军用装备,对“五性”设计有明确要求。可通过借用空管成熟监视技术和体系,增加军用监视的成熟度;优化功能(对与目标识别无关的功能进行裁剪),简化设计,减少器件和组件等数量,降低功耗;采用优化系统架构对L波段进行综合一体化设计,利用数字化处理技术进行硬件复用,提升设备扩展和升级能力;同时采用人机工程、优化人机交互界面,提高装备的用户操作维护体验。
为提高装备的生存能力,电磁兼容、抗干扰和反侦收能力也有特殊要求,首先尽量少辐射或不辐射电磁信号,在源头上减少被侦收的概率,坚持非必要不询问原则。为降低对电磁环境的额外干扰和被侦收打击的可能性,地面ADS-B站需采用ADS-B IN工作方式,MLAT需配置为无源系统来提供增强空管监视功能;其次对A/C模式、S模式可采用敌我识别系统常用的牵引工作方式,仅对特定方位的特定目标进行有限的突发询问,一旦有效识别目标随即进入静默状态。
MLAT对欺骗干扰和饱和攻击具有很强的抑制能力,同时兼容A/C模式、S模式,并与ADS-B技术相兼容,通过针对性的接收频段和功能扩展,可对M4、M5和东方体制的应答信号进行无源定位。
敌我识别系统和空管监视系统的数据融合,可获取相关目标更丰富的特征信息[8],确保做出更优的判决处理,进一步增强目标属性的识别力,达到装备高可靠性、信息高置信度、系统高可用度的要求。目标属性与监视模式对照如表2所示。
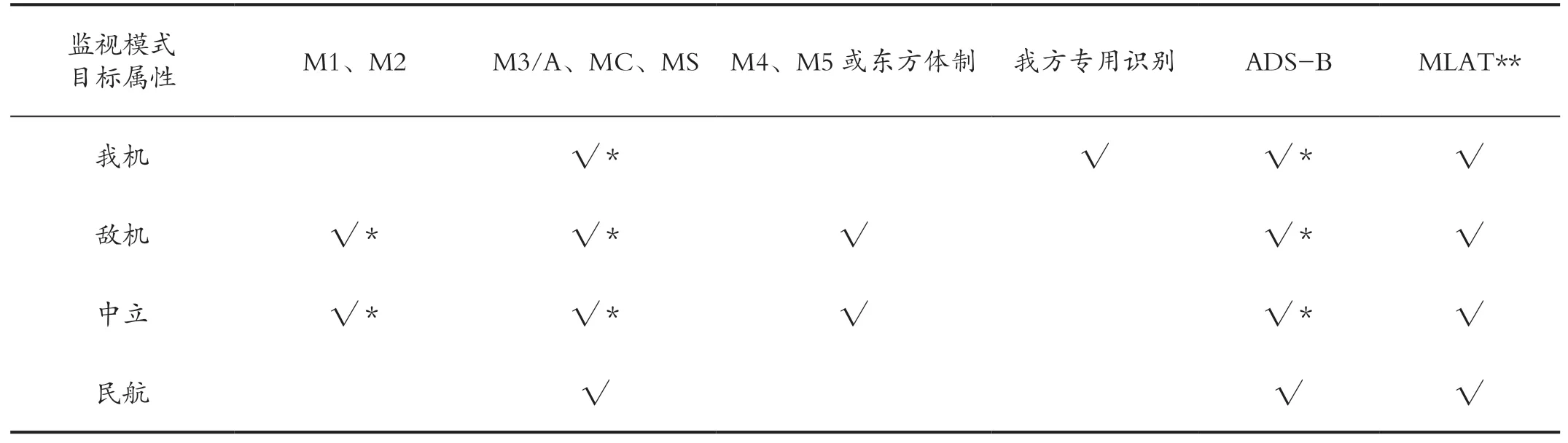
表2 目标属性与监视模式对照表Tab.2 Comparison between target attribute and surveillance mode
6 结语
空管协作式监视是敌我识别的有力补充,不仅减少由于误识别导致的对民用或中立目标的误伤,同时也极大地提高了敌我识别的准确性。但空管监视站点的架设对阵地有较高要求,一般机动装备由于地形和隐蔽需要很难全面达到架设要求,在一定程度上限制了设备性能的充分发挥。如针对具体关注目标和区域适当调整阵地,就能发挥较高效能,其提供的无源、连续和实时的空中交通态势感知能力,可对敌我识别系统识别能力进行必要的补充。具有空管协作式监视能力的敌我识别系统,能进行多传感器信息融合,更好地提供空中目标监视识别、实时动态空情掌握,保证空中交通顺畅有序,有效提升防空作战快速反应能力。该系统将在使用中不断改进完善,具有更强的生命力,更广阔的应用场景。
引用
[1] 魏岳江.如何识别民用与军用航空目标[J].江苏航空,2014(4): 45-47.
[2] 张尉.二次雷达原理[M].北京:国防工业出版社,2007.
[3] 张召悦.空管监视技术[M].北京:国防工业出版社,2017.
[4] MH/T 4036:1090MHz扩展电文广播式自动相关监视地面站(接收)设备技术要求[S].2012.
[5] MH/T 4037.2:多点定位系统通用技术要求 第2部分:广域多点定位系统[S].2017.
[6] MH/T 4003.2:民用航空通信导航监视台(站)设置场地规范 第1部分:监视[S].2014.
[7] 程季锃,程健,何福京.空防空管一体化运行体系能力需求分析[J].中国民航飞行学院学报,2012(7):15-18+22.
[8] 曹晓蓓.综合敌我识别方法研究[J].电讯技术,2011,51(12):1-3.
猜你喜欢
轻兵器(2022年10期)2022-10-22 03:05:26
作文成功之路·小学版(2019年8期)2019-09-18 01:12:04
民航管理(2019年2期)2019-06-04 03:50:22
劳动保护(2019年3期)2019-05-16 02:38:00
读者(2017年14期)2017-06-27 12:27:06
现代兵器(2016年6期)2016-06-25 16:20:24
读写算(下)(2016年9期)2016-02-27 08:46:31
电子工业专用设备(2015年4期)2015-05-26 09:10:39
河南科技(2014年22期)2014-02-27 14:18:31
河南科技(2014年10期)2014-02-27 14:09:23
