
基于Revit二次开发的基坑工程施工监测系统设计
2022-09-23 12:16高秀娟
成都工业学院学报 2022年3期
高秀娟
(安徽新华学院 土木与环境工程学院,合肥 230088)
基坑施工工程的地质条件具有一定的复杂性与不确定性,如果不对现场环境进行有效监测,会造成施工数据不准确,影响基坑施工安全。因此,基坑工程施工监测系统对保证基坑稳定,以及周围土体和建筑物的安全具有重要意义。
文献[1]利用传感器采集施工数据,与中央处理器建立数据交换关系,安全预警基坑施工的超警戒参数,将预警信息回传到施工现场安装的声光报警器,对基坑进行三维可视化声、光预警,在内力较大的支撑上布置监测点,其传感器通信传输时延和通信最高频率分别为0.6 s和1.5 s/次,但该方法数据报文发布信息的字数较少,施工监测值与实测值偏差较大。文献[2]埋设与支护桩同长的测斜管,保证钢支撑心轴线与安装中心点对齐,螺丝刀固定监测仪器设备,测读标志始端的传感数据,但该方法的测量数据精度较差,即施工监测值与实测值偏差较大。
针对上述问题,为了提升基坑工程施工监测结果的准确性,降低监测结果偏差,本文设计基于Revit二次开发的基坑工程施工监测系统:首先,设计出监测系统的整个硬件架构,采集监测数据,并将监测数据传输至中央处理器进行北斗信息标记,再存储至数据库以分析基坑施工情况;然后,采用由整体到局部的原则布设基坑工程的监测点,优化Revit基坑开挖模型的流程;最后,根据Revit基坑开挖模型生成空间效应曲线和时空效应曲线,模拟基坑工程监测点数值变化,实现施工监测。
1 系统设计
1.1 硬件设计
选取监测设备仪器,设计基坑工程施工监测系统结构,如图1所示。
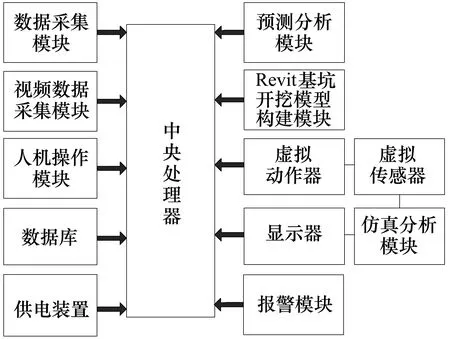
图1 基坑工程施工监测系统结构
安装北斗卫星接收机在监测点,通过数据采集模块和视频数据采集模块,提供监测点的三维位移信息,利用北斗短报文通信技术,把监测数据传输至中央处理器,北斗短报文通信可以实现系统与用户、用户与用户之间的双向报文通信[3]。采集模块选取的仪器设备如表1所示。
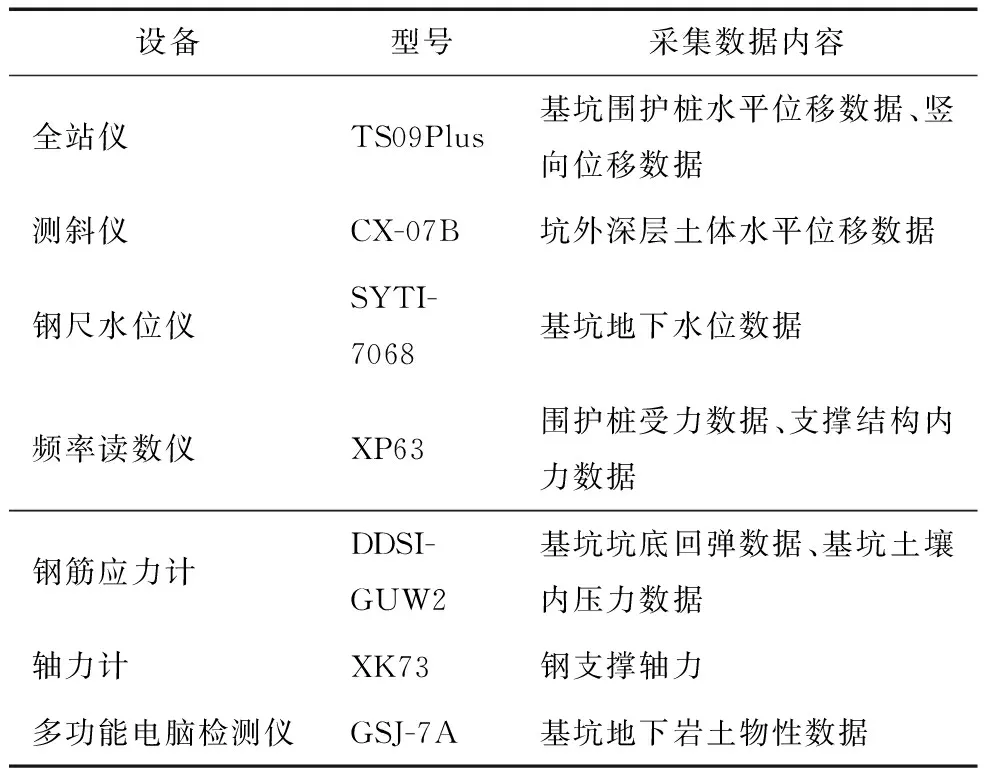
表1 采集模块选取仪器设备
选取GU739FR中央处理器,对采集监测数据进行北斗信息标记,并发送数据至数据库进行存储,分析基坑工程施工情况[4]。转换标记信息数据格式,令Revit模型读取数据,传输控制指令,导出数据库内的相应数据,将分析结果传输至移动终端的显示屏[5]。令虚拟动作器与Revit模型的各元素建立关联,把模型载荷、特性、单元作为参数,在指定范围内变动参数,改变模型节点的位置和方向,对Revit模型进行缩小、分解、放大、切割,对监测数据进行自动显示[6]。
1.2 软件设计
1.2.1 优化基坑工程施工监测流程
优化Revit基坑开挖模型的开发流程,即简化工程施工监测步骤。采用由整体到局部的原则[7],基坑工程的监测点布置和监测方式如下:1)监测支护结构位移时,沿基坑冠梁方向,依照20 m的测点间距布置监测点[8],选取视准线小角度、几何水准2种方式,分别用于水平位移和竖向位移监测;2)调整测斜仪孔号与现场测斜孔一致,将探头缓慢放至管内的最深处,当读数仪显示数值稳定后,测量深层位移,然后调整探头方向进行反测,在相同的深度标志处,测量对应数据[9];3)监测支撑轴力时,对轴力计安装架进行焊接,把轴力计放在安装架的钢筒内,布设多个轴力监测点[10-11],通过振弦频率读数仪,读取钢支撑轴力的频率值;4)针对基坑周边地表沉降监测,钻孔地面至指定深度,在孔内填入钢筋,布置监测点在钻孔四周[12];5)针对地下水位监测,埋设钢尺水位仪,通过土工布对水位管进行无缝包扎,通过清水洗孔,读取水位仪刻度在管口处的数值[13]。
在开发环境下二次开发Revit程序,将基坑工程项目信息都放在Revit族群中,Revit基坑开挖模型选取基础梁族和承台族[14],其中基础梁族采用Revit自带的族文件,承台族则运用族样板文件进行创建。
首先编写承台族创建代码,依照承台族轮廓,定义不同参考面的点和视图,然后创建拉伸体的二维轮廓,定义拉伸长度、轮廓、工作平面,修改尺寸,对齐拉伸体各个参考面,为承台族添加参数,在参考面的固定端点处,对两端点进行连接,构成尺寸线,确定尺寸线所在的位置,获得与尺寸标注绑定在一起的参考面,为承台族添加族类型,实现Revit基坑开挖模型的构建[15]。把监测数据输入Revit基坑开挖模型,生成空间效应曲线和时空效应曲线,分别表示监测数值推进变化和时间变化,将实测曲线与绘制曲线进行对比[16]。至此完成基坑工程施工监测流程的优化。
1.2.2 模拟基坑工程监测点数值变化
根据Revit基坑开挖模型的生成曲线,模拟基坑工程监测点数值变化。监测点沉降值ΔF为:
ΔF=F1-F2。
(1)
式中:F1、F2分别为监测点的实测高程和初始高程[17]。
监测点的水平位移X、竖直位移Y为:
(2)
式中:Δx、Δy分别为X方向和Y方向的位移量;A、B分别为X方向和Y方向的累积量[18]。
计算X方向和Y方向的测点i,应变读数正测和反测的差值ζi、Ii为:
(3)
基坑围护桩体的轴线测点平面坐标(X1、Y1)为:
(4)
式中:(X0、Y0)为基准点坐标;L为轴线测点总数;U为测斜仪标距[19]。
水位高程S为:
S=S1-S2。
(5)
式中:S1、S2分别为水位工程、管口高程[20]。
支撑轴力G为:
G=Di(C2-E2)。
(6)
式中:Di为测点i的轴力标定常数;C为轴力自振频率;E为轴力初始自振频率。统计各测点监测数据,完成基坑工程监测点数值变化的模拟。
2 实验论证分析
将本系统与2组常用基坑工程施工监测系统文献[1]和文献[2]系统进行对比实验,以比较基坑工程施工的监测值与实测值偏差大小。
2.1 实验准备
工程为某市区的下穿道基坑工程,施工方式为明坑顺做,所在场地土层从上至下依次为路基垫层、黏土、粉质黏土、卵石、黏土,基坑沿线地貌单一且地势平坦,周边28 m范围内,地表存在集中分布的构筑物,引道两端为开口引道,排桩支护采用旋挖灌注桩。基坑桩号范围为CK0+462.937~CK0+598.528,总长为362.482 m,净宽为14.928 m,下穿涵洞开挖深度为12.930 m,部分基坑深度为17.920 m,基坑标准段宽度为18.700 m,排桩挡墙支护结构,共分为8段,长度为238.400 m,钢管内支撑水平间距为7.500 m,轨排井段基坑的最大宽度为25.930 m,桩长为13.000 m,基坑钻孔嵌固深度为9.000 m,监测项目的总测点数量为183个,桩间距和桩径分别为130 cm和100 cm。
2.2 实验结果
2.2.1 支护结构位移监测偏差
当基坑支护顶板浇筑完成后,在每个支护段取典型监测点,监测不同深度下的支护结构水平位移,统计监测值与实测值的偏差,测试结果如表2所示。由表2可知,支护结构顶部水平位移最大,水平位移量随着深度的增加而减小,本系统、文献[1]系统、文献[2]系统的水平位移平均监测偏差分别为0.07,0.69,0.68 mm。相比2组常用系统,本系统的监测偏差分别减小了0.62,0.61 mm。
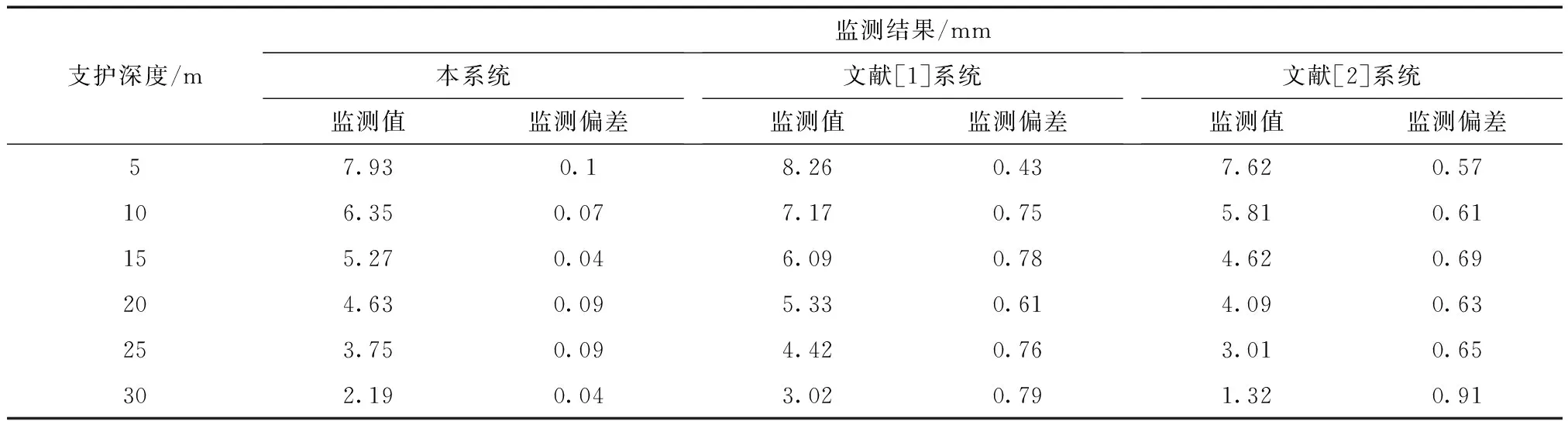
表2 支护结构水平位移监测结果
竖向位移测试结果如表3所示。由表3可知,本系统、文献[1]系统、文献[2]系统的竖向位移平均监测偏差分别为0.10,0.57,0.66 mm。相比2组常用系统,本系统监测偏差分别减小了0.47,0.56 mm。
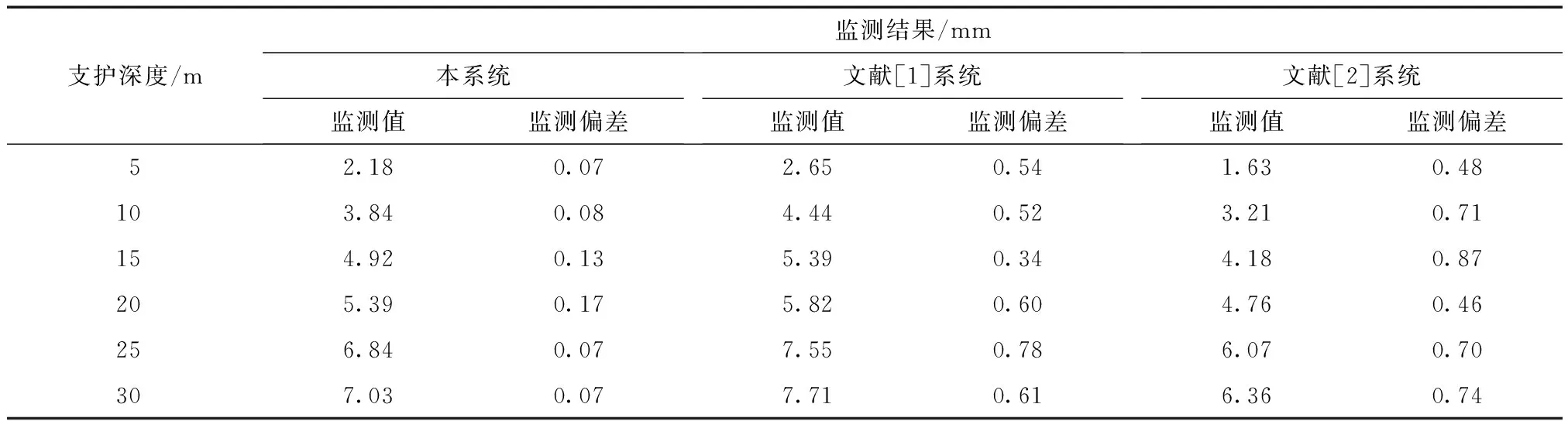
表3 支护结构竖向位移监测结果
2.2.2 钢支撑轴力监测偏差
基坑工程施工过程中,在钢支撑拆除前,3组系统分别监测钢支撑轴力,分析支撑轴力随时间的变化规律,不同监测周期下的轴力数据如图2所示,其监测周期为3 d。
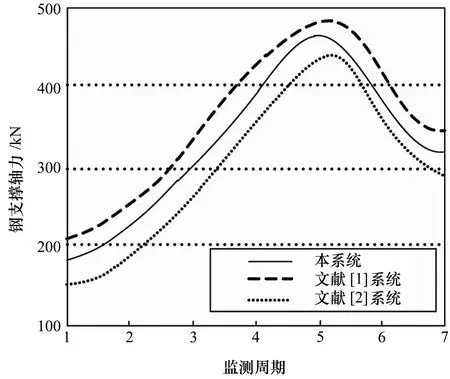
图2 钢支撑轴力时间变化曲线
由图2可知,在第1~5周期,基坑开挖速度快,支护结构变形不断增加,钢支撑轴力也随之增加,达到最大值,第5周期后,基坑开挖结束,钢支撑轴力有所下降。
钢支撑轴力监测偏差如表4所示。
由表4可知,本系统钢支撑轴力平均监测偏差为5.64 kN,文献[1]系统和文献[2]系统监测值整体偏大,钢支撑轴力平均监测偏差分别为16.75 kN和16.47 kN,相比2组常用系统,设计系统监测偏差分别减小了11.11,10.83 kN。
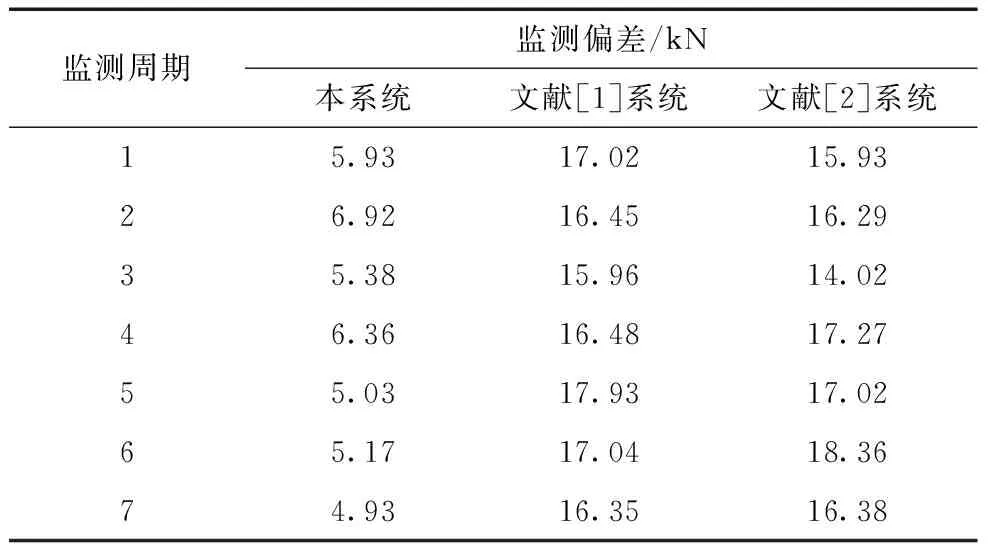
表4 钢支撑轴力监测结果
2.2.3 基坑地表沉降监测偏差
当基坑工程第1层开挖完毕后,3组系统分别对地表沉降监测点进行监测,统计不同距坑边距离下的地表沉降值,地表沉降与坑边距的变化规律如图3所示。
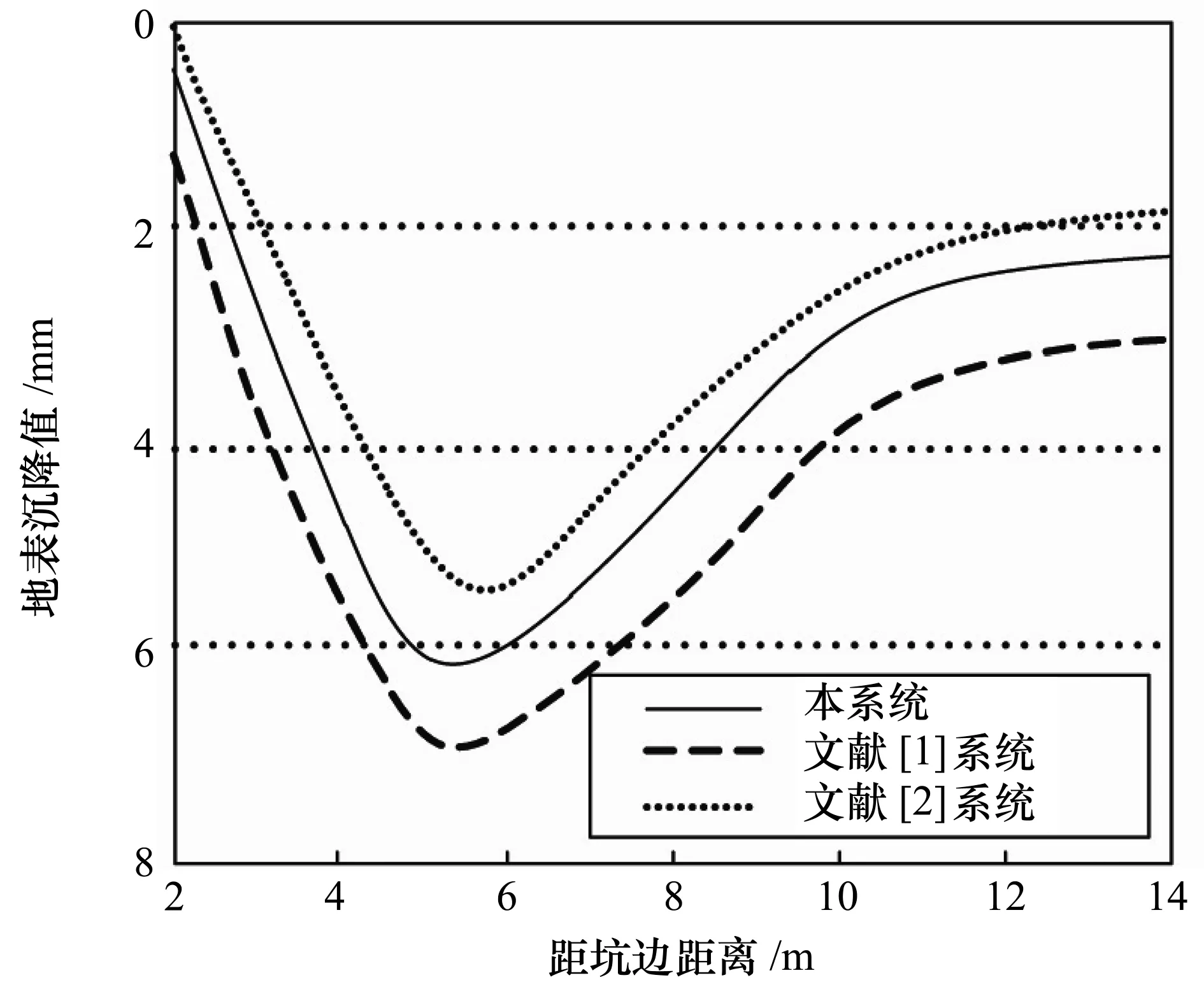
图3 地表沉降坑边距变化曲线
由图3可知,距离基坑边缘外5 m处左右,地表沉降达到最大,沿这一位置向两边递减。
地表沉降监测偏差如表5所示。
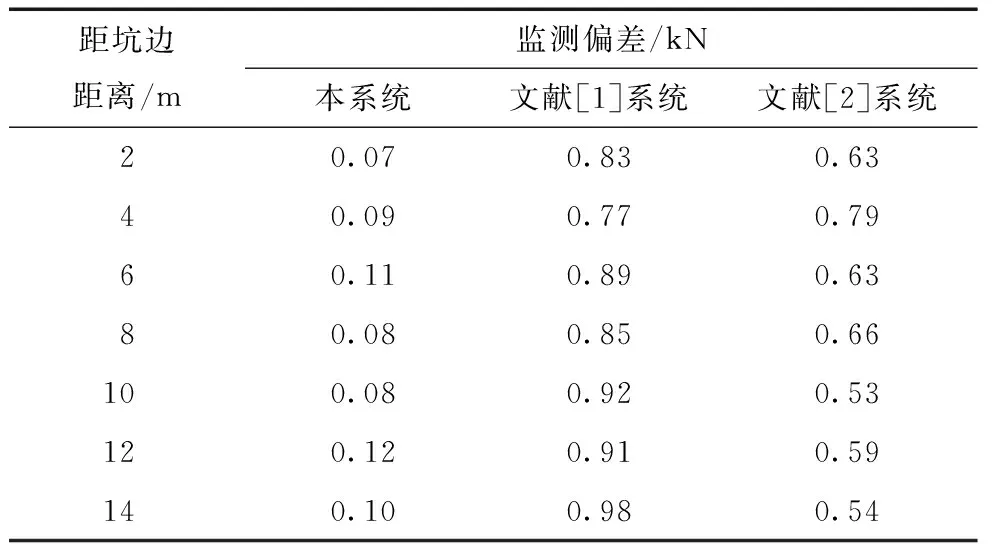
表5 地表沉降监测结果
由表5可知,本系统、文献[1]系统、文献[2]系统的地表沉降平均监测偏差分别为0.09,0.88,0.64 mm。相比2组常用系统,本系统监测偏差分别减小了0.79,0.55 mm。
3 结语
本设计充分发挥了Revit二次开发的技术优势,减小了基坑工程施工监测值与实测值的偏差,提高了监测精度。但此次设计系统仍存在一定不足,在今后的研究中,会将基坑土体流变性、动态载荷等因素考虑在内,进一步保证系统监测结果的规律统一性。
猜你喜欢
铁道建筑技术(2022年10期)2022-10-28
建材发展导向(2022年18期)2022-09-22
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
水电站设计(2020年4期)2020-07-16
水道港口(2020年2期)2020-06-08
铁道勘察(2016年3期)2016-08-01
湖南畜牧兽医(2016年3期)2016-06-05
