改进ADC 方法在潜艇作战系统效能评估中的应用*
2022-09-16 10:00:56吴茂林
火力与指挥控制 2022年8期
徐 榕,吴茂林,胡 平
(1.海军工程大学兵器工程学院,武汉 430033;2.海军工程大学舰船与海洋学院,武汉 430033)
0 引言
潜艇作战系统作为潜艇作战的核心系统,是由武器平台、信息控制、探测、通信、导航等分系统组成,其能力是潜艇战斗力的直接体现。潜艇作战系统效能是指在规定条件下、规定时间内完成其功能的程度,集中反映了系统的特性和水平。随着战备训练任务强度增大,对作战系统的能力和完好性提出了更高的要求,如何评估潜艇作战系统的系统效能,尤其处于系泊状态下的战备值班潜艇执行任务前的评估,如何确保效能评估结果的准确性,对潜艇提高执行任务有效性非常关键。因此,需要一种高效的方法对潜艇作战系统进行效能评估,掌握系统效能情况,为制定作战方案提供参考依据,从而提高潜艇作战系统执行任务的能力。
近年来,针对潜艇作战系统效能评估的研究取得了较大成果,见文献[1-4]。现阶段的ADC 评估方法多数是对潜艇作战系统的固有能力、环境因素、人员因素等进行分析,忽略了初始状态(即系统开始执行作战任务时的系统状态)对能力矩阵的影响,对执行任务前的潜艇作战系统综合效能评估缺乏相关研究。因此,本文选择系泊状态下的潜艇作战系统作为研究对象,建立指标体系,将初始状态对能力矩阵的影响纳入评估范围,改进状态矩阵求取公式和固有能力矩阵的定义以及求取公式,建立评估模型,给出更贴合实际的评估方法。
1 潜艇作战系统效能指标体系
效能指标体系的建立和完善是进行系统效能评估工作的关键环节,效能指标体系可以为掌握系统工作流程和系统组成提供技术支持,并且效能指标体系的合理与否直接影响到评估结果的可靠性和有效性。
潜艇作战系统主要包括4 个分系统:目标探测系统、指挥控制系统、武器系统和导航系统。目标探测系统由雷达、声纳和潜望镜组成,负责作战目标位置和目标类型等信息的探测;指挥控制系统接收来自各分系统的信息,辅助指挥员进行作战决策,并且下达指控命令给各分系统;武器系统主要是完成武器的发射控制和导引工作;导航系统主要是提供潜艇的定位信息,航速和水流速度等信息。潜艇作战系统效能指标体系如图1 所示。
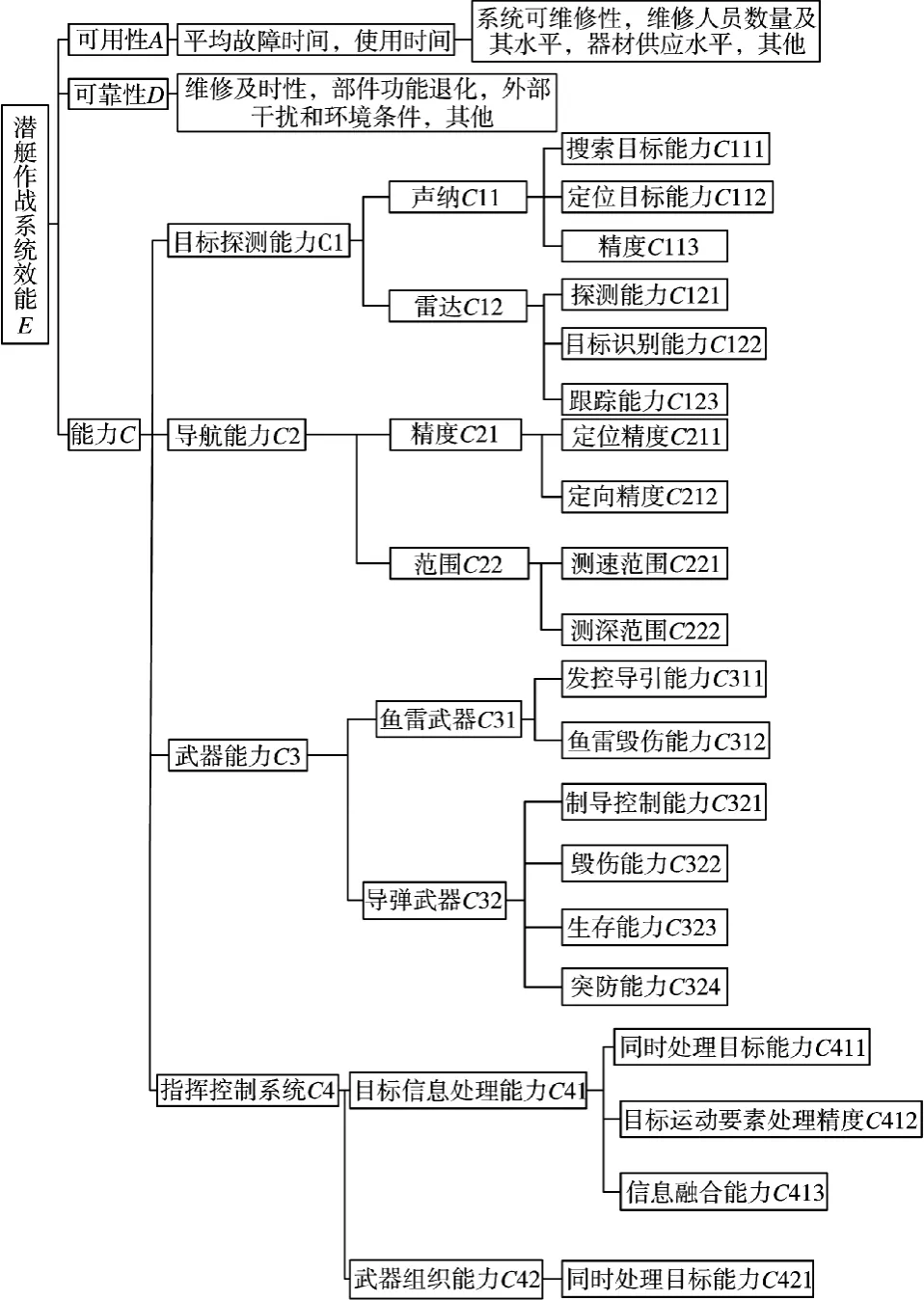
图1 潜艇作战系统效能指标体系框图
潜艇作战系统效能指标体系由可用性、可靠性和能力3 部分组成。可用性和可靠性主要与系统维修水平、系统部件的退化、外部环境干扰等有关。能力主要受系统组织结构和各分系统所具备的能力影响。系统能力按照系统组成逐层分解为可度量基本功能指标。
2 ADC 评估模型建模
传统ADC 模型是通过可用性、可依赖性和能力3 大要素评估装备系统效能。系统效能的表达式如式(1)所示。

A 向量是系统可用性向量,A=[a,a,…,a]是系统在开始执行任务时某个状态概率的集合,a(j=1,2,3,…,n)表示系统在执行任务开始时处于j状态的概率值(0≤a≤1,Σa=1),n 为系统划分状态数。A 向量是在开始执行任务时系统状态的度量,与系统可维修性、维修人员数量及其水平、器材供应水平等因素有关。
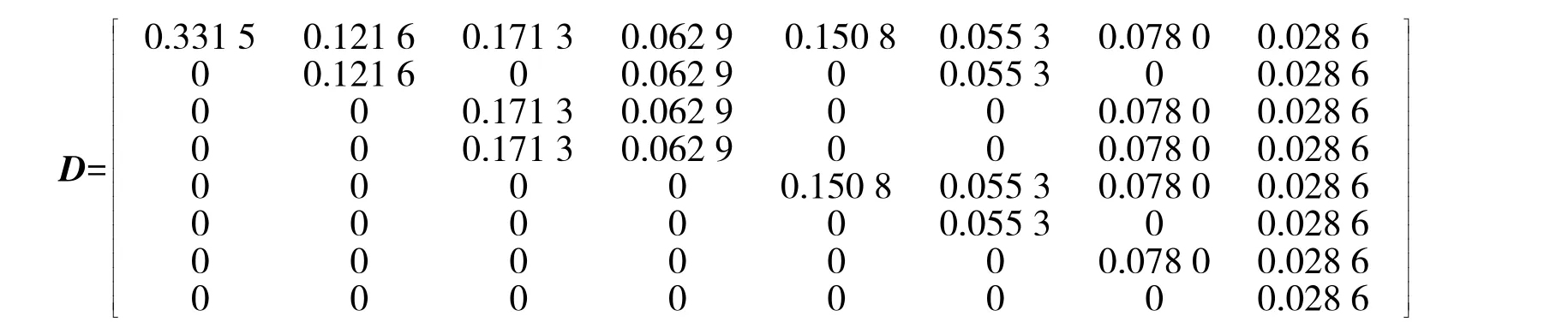
D 矩阵是可靠性矩阵,D=(dij),又称系统可信度矩阵,是执行任务中各系统状态之间两两转移的概率集合。dij 表示系统在执行任务开始时处于i状态,在执行任务过程中因系统变动而导致在执行任务结束时系统转移到j 状态的概率。可靠性矩阵与系统在执行任务期间内维修的及时性,部件功能退化,外部干扰和环境条件等因素有关。
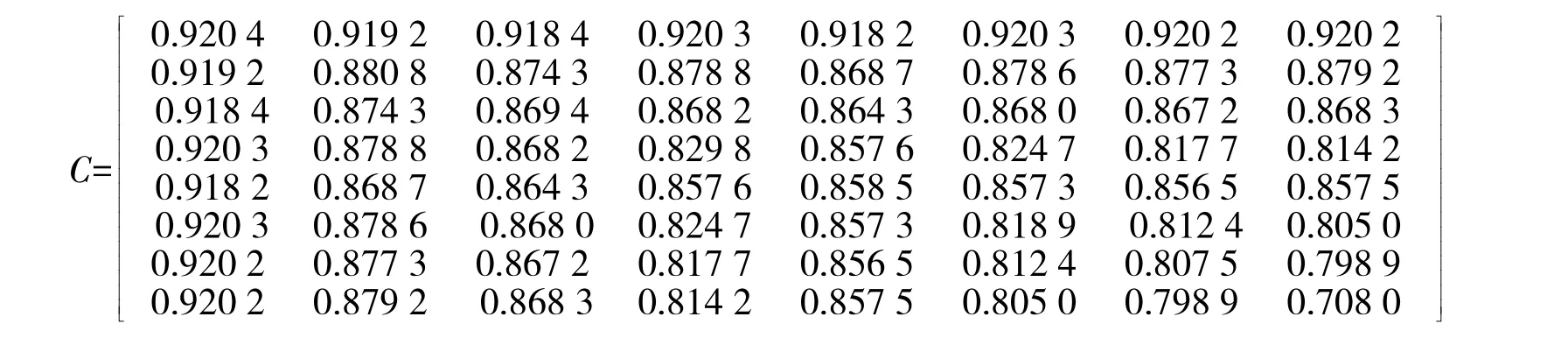
C 矩阵是能力矩阵。C=[c;c;…;c],c是任务结束时系统处于n 状态下的能力值,是系统各项性能的集中体现。与系统部件质量,系统所处状态和系统组成结构等因素有关。
由上可知,ADC 模型评估系统的计算公式是:
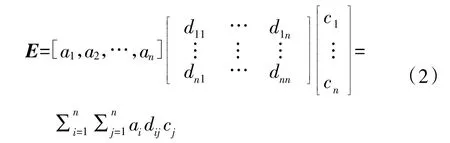
相对于其他武器装备系统,潜艇作战系统在执行任务的过程具有如下特点:其系统部件出现损坏情况时,有可能出现损坏且不能修复情况,执行任务周期长。传统ADC 模型是基于理想状态下的理论分析,已经不能真实地反映装备系统在执行任务期间的作战效能。为了确保系统的效能评估结果的真实性和客观性,需对传统ADC 模型进行改进,将潜艇作战系统特性对可用性向量A 的影响体现出来,并将固有能力矩阵赋值从单一状态转变为综合任务状态。
2.1 可用性向量建模
为了便于模型的建立和验证,因此,假设导航系统在执行任务期间处于无故障状态。潜艇作战系统中当武器系统,目标探测系统和信息处理系统中某一分系统出现问题,潜艇作战系统则无法正常完成作战任务,因此,潜艇作战的子系统与整套武器系统可以视为是串联关系。
传统的潜艇作战系统评估中可用性赋值方法如式(3)所示。当部件出现损坏且无法修复情况时,则无法确定系统平均修复时间,无法对可用性向量赋值。因此,改进赋值公式如式(4)所示。系统故障延迟修复时间包括系统故障修复时间和发现故障到故障开始修复时间。当部件存在出现损坏且无法修复时,则系统故障延迟修复时间只包括发现故障到故障开始修复时间。

其中,T 为系统平均故障时间,Tx 为系统平均修复时间。Tf 为系统故障延迟修复时间。
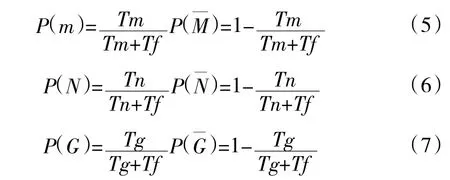
则可用性向量中ai 可以用下列公式表达
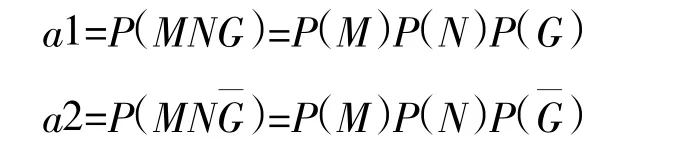
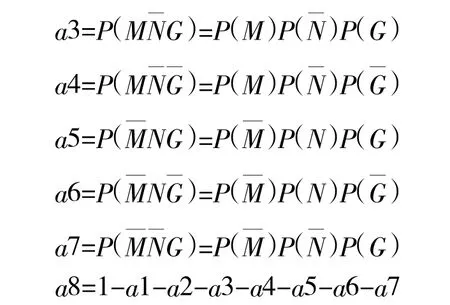
因而可用性向量为A=[a1,a2,a3,a4,a5,a6,a7,a8]。
2.2 可靠性矩阵建模
潜艇作战系统的可信度矩阵D 是在可用性矩阵A 建立的情况下,执行任务过程中系统各状态两两转移概率的集合。设武器系统目标探测系统和信息处理系统的任务可靠度分别为Rm,Rn,Rg,潜艇执行作战任务的时间为T。潜艇作战系统在航期间内分系统的故障分布时间服从指数分布,则由系统使用时间,平均故障时间等参数表示的可信度求取公式为:
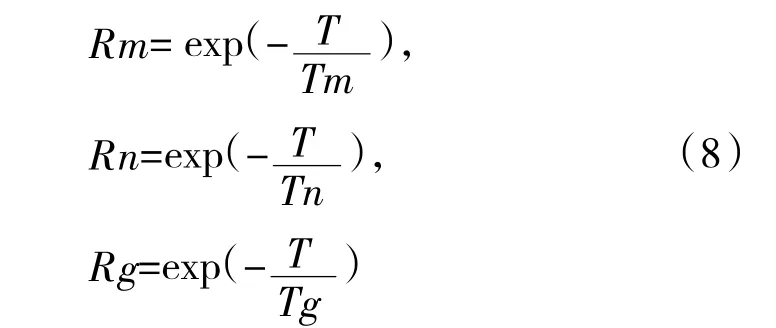
假定子系统在执行任务中,出现损坏且不可修复,则子系统的状态转移概率为:
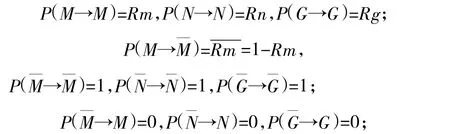
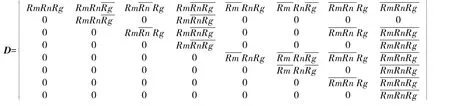
因子系统与整体系统之间是串联关系,子系统之间的状态概率是相互独立,则可信度矩阵中元素的求取公式为:
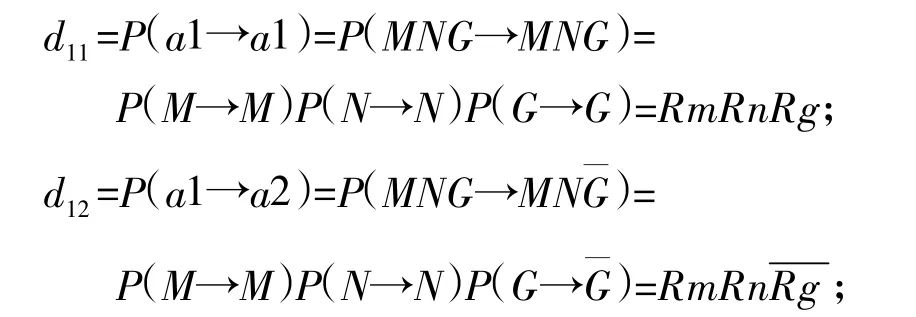
依次类推可以得到D 矩阵中各元素的求取公式,因此,
2.3 固有能力建模
由于系统效能是潜艇作战系统在航期间内的效能,典型ADC 评估方法中的A 状态转移矩阵和D 状态转移矩阵相乘所代表的含义是,系统执行任务时各初始状态到执行任务结束时某一状态的概率之和。但是传统中的ADC 评估方法中的C 矩阵是系统执行任务结束时的终止状态下的固有能力矩阵,无法体现出系统有初始状态转移到终止状态的动态过程中初始状态对固有能力矩阵的影响。因此,将C 矩阵值重新定义和构建计算方法。
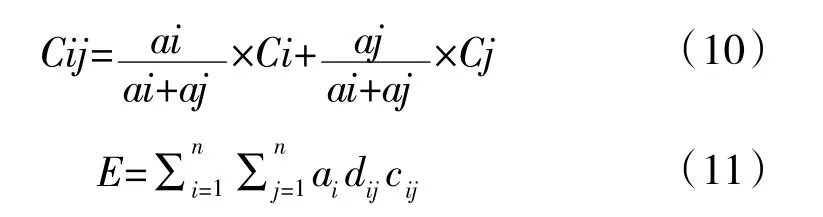
定义Cij:Cij 表示系统从初始状态i 在执行任务过程中转到j 状态,并且维持j 状态到系统执行任务结束中的能力值。
本文采用武器性能指标综合评估和专家打分法结合的方式求取不同状态下的C。根据性能指标对于作战任务完成作用的不同,通过专家打分的方式给予性能指标一定的加权和评判值。

式(9)中:hi 是指标的权重,qi 是指标的评判值。
固有能力矩阵求取公式:
改进的系统效能求取公式将固有能力矩阵从基于单一状态下到综合状态下求取,更符合潜艇作战系统效能评估,准确反映出其执行任务的能力。
3 算例分析
以某型潜艇上的作战系统为例,对改进的ADC方法进行验证,各系统的平均故障时间为1 800 h,2 400 h,2 000 h,系统平均延迟修复时间120 h,平均使用使用为720 h。代入式(7)~ 式(9)可得A=[0.897 3,0.028 0,0.037 4,0.011 2,0.033 6,0.001 1,0.001 4,0.004]。
将数据代入式(10)~式(11)中,得到:
Cn=[0.920 4;0.880 8;0.869 4;0.829 8;0.858 5;0.818 9;0.807 5;0.708 0]


依次类推可得,
将A,D 和C 的值代入式(9),则
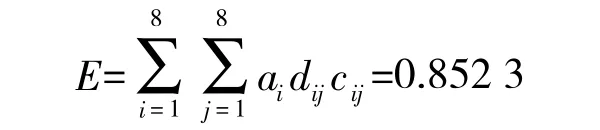
与系统基本效能E0=ADCn=0.809 7 相比,考虑到初始状态对潜艇作战系统效能影响的系统效能E=0.852 3,虽然效能评估结果有所上升,但综合初始状态之后的效能评估结果更符合执行任务前的潜艇作战系统的实际作战能力,为制定作战方案和提高执行任务有效性提供支持。
4 结论
从潜艇在航阶段的特点出发,综合考虑到在航阶段系统初始状态对潜艇作战系统效能评估的影响,提高了对于系统能力矩阵描述的准确性,同时对系统状态计算方法和能力矩阵计算方法进行了改进,使得效能评估结果更加贴合实际系统的能力。改进ADC 方法尚未将系统某子系统完全失效对于系统整体效能的影响纳入考虑范围,也未将多武器系统协同作战对于效能影响纳入考察范围,这两方面有待后续研究。
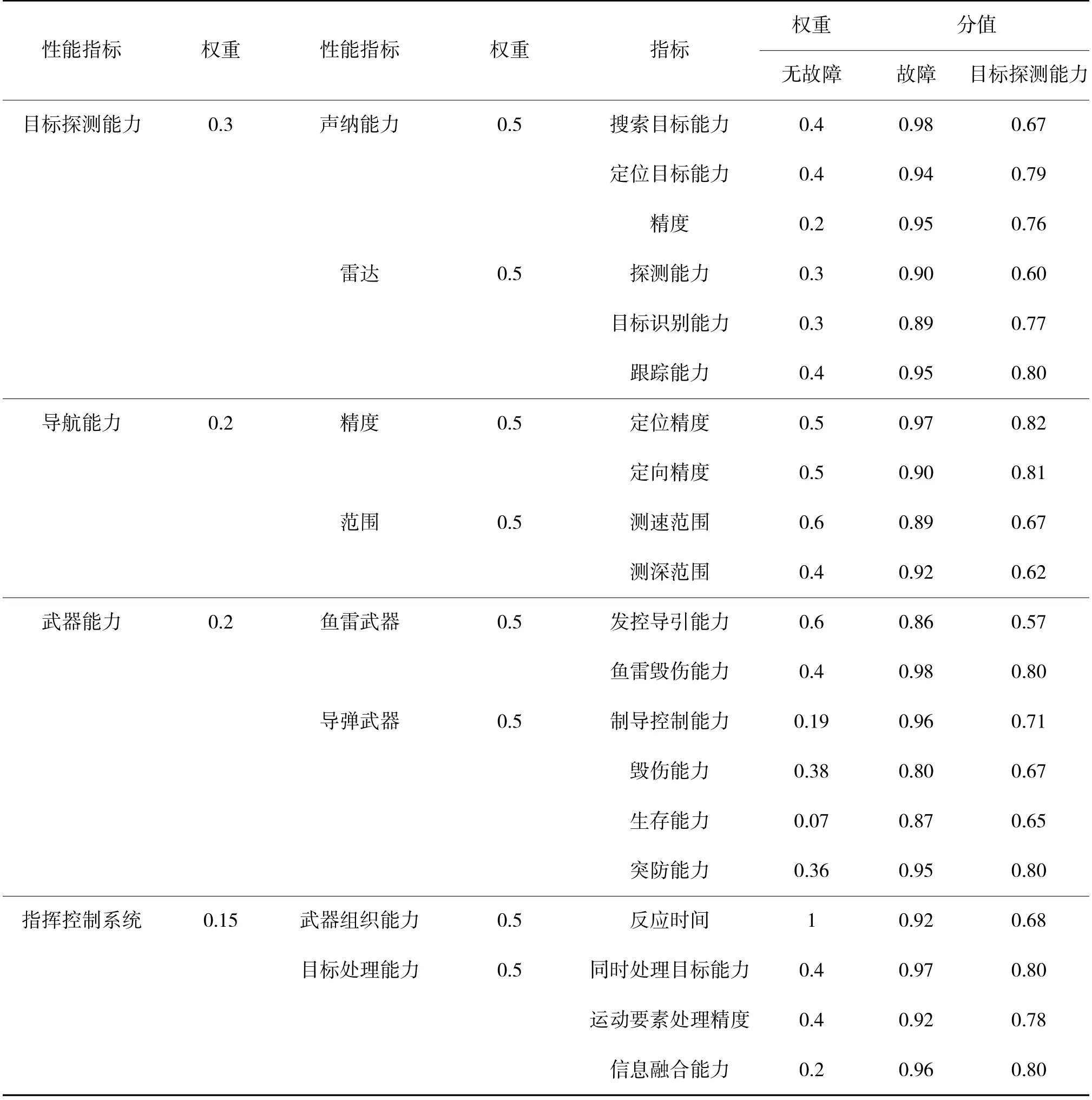
表1 权重打分表
猜你喜欢
包装工程(2023年24期)2023-12-27 09:18:26
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:38
小哥白尼(军事科学)(2021年6期)2021-11-02 05:25:10
海洋信息技术与应用(2021年1期)2021-06-11 01:20:34
小哥白尼(军事科学)(2021年12期)2021-03-29 00:49:14
小哥白尼(军事科学)(2021年11期)2021-02-28 08:29:32
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:34
领导决策信息(2017年11期)2017-05-17 04:49:12
河南科技(2015年7期)2015-03-11 16:23:13
作物研究(2014年6期)2014-03-01 03:39:04