机器人3D 打印建筑的打印路径规划方法探索
2022-09-16 02:57黄舒弈张宇徐卫国
建筑技艺 2022年7期
黄舒弈 张宇 徐卫国
1 研究背景
作为一种新的数字建造方法,3D打印混凝土技术具备了最大限度提高施工效率、消除额外工序、减少临时脚手架和模板材料的优势。自轮廓加工技术(Contour Crafting Technology)提出至今,越来越多3D打印混凝土建筑落成并投入使用,亦演化出了龙门架3D打印与机械臂3D打印两种如今最为常见的增材建造方法。前者从脚手架的概念出发,通过链条驱动,使CNC控制的打印头在X、Y、Z方向移动,实现类似桌面3D打印机的工作效果。后者则通过将打印头加装在六轴机械臂上,让混凝土材料随着机械臂的移动而沉积。由于设备工作原理不同,当下的龙门架项目往往能够实现更大的空间打印,同时能够更有效地保证建筑打印一体化,而机械臂则在灵活性和自由度上具备更多优势,能够更好地满足对设计多元化、定制化的需求,体现了数字化时代新的工匠精神。
虽然3D打印混凝土已经展现了实现参数化形态的诸多可能,但受限于混凝土打印材料的凝固特性以及生成复杂打印路径的难度,现阶段3D打印的成品形态大多比较简单。再加上材料自重、打印精度(层高和笔宽)的影响,一些变化不规律、起伏较大的形态并不适合用3D打印的方式实现,或者无法达到较好的效果。除了部分研究性机构的成果外,目前大部分机械臂建造的项目仍采用最为常见的、与龙门架打印机工作模式无异的水平逐层打印方式,未能发挥机械臂在六个轴向上灵活移动的潜质。这也说明,当下建筑行业内对机械臂这一新兴设备的应用尚停留在工业3.0高效的、自动化的状态,而未真正踏入工业4.0的个性化、数字化生产阶段。因此,如何充分发挥机械臂在智能建造领域的优势,实现更多元的建筑形式,是当下建筑行业需要考虑的问题。
2 3D打印混凝土的打印路径规划概述
2.1 打印路径规划的早期探索
3D打印混凝土实现几何成形的主要原理是让打印头沿着特定路径(Tool path)运动,与此同时,泵送系统通过管道将混合好的打印材料运输至打印头并挤出。除了常见的水平逐层打印,研究者们也在不断探索更多的打印路径规划方法,以实现更多样、更稳定的几何结构。例如南加州大学的比洛克·霍什内维斯(Behrokh Khoshnevis)教授在提出轮廓加工工艺的同时,也由传统的无支撑结构砖砌拱顶的建造方式出发,构想了在没有外部支撑的情况下使用3D打印方法建造圆顶和拱顶的可能性,其设想的本质是通过将打印路径由水平向转变为斜向,使其能够满足打印材料自然堆积的受力需求(图1,2)。在机械臂3D打印技术发展成熟后,这一设想的可行性也由法国国立桥路学校的保罗·卡尔诺(Paul Carneau)在实验中加以印证。因此,如果能够探索更多3D打印路径的规划方法,使更多混凝土结构能够流畅、智能、精致地实现,将有助于更大限度地发挥机械臂的优势,也能有效减少复杂几何形式在施工过程中时间、人力、材料与能源的损耗。

1 传统建造方法中的无支撑结构砖砌拱顶
2.2 常见的机械臂打印路径规划类型
简言之,打印路径规划的目的是让3D打印过程中的每层混凝土打印材料都能够顺畅地叠合,一方面需要每层打印路径的层高尽量保持恒定或均衡变化,另一方面也要确保上层打印路径相较于下层的悬挑不至于过大,以避免因混凝土自重而导致的坍塌。如今,越来越多适用于机械臂的打印路径规划方法得到尝试与应用,根据每层打印路径变化原理的不同,可分为以下三类(表1)。
(1)水平逐层打印
水平逐层打印是3D打印混凝土技术中最为常用的建造方法,在过程中打印头与打印平面始终保持平行关系。在泵送系统稳定与机械臂运行速度恒定的前提下,混凝土打印材料可以在较快的挤出速度下仍然维持特定的宽度,这种打印方式效率高、需要的人为干涉小,适用于体量大、变化少的建筑墙体(表1a)。这种方法也可用于变化幅度较为微弱的曲面或斜面,等高线式的切割方式使得几何形态最终呈现出类似梯田的效果(表1b)。而当设计中出现角度较大的斜面或曲面时,各科研团队往往会借助建筑墙体内的空腔来打印支撑结构,用以承托悬挑的混凝土打印材料。
(2)变平面打印
变平面打印是六轴机械臂所特有的建造方法,每一层打印路径所在的平面是循序变化、不相互平行的。因此,打印的构件不需满足水平切片所要求的悬挑限制,可以通过不同平面的变化与切换实现更自由的构件形态,并且通过不同打印构件之间的组装实现更加复杂的结构。2021 年,苏黎世联邦理工学院(ETH)与扎哈·哈迪德建筑事务所(Zaha Hadid Architect)等团队合作的Striatus 缆索结构桥项目(表1c)采用了此种方法,这使得每个混凝土构件能够被精准地打印与装配,也实现了桥体的纯受压状态。
(3)曲面打印
曲面打印中机械臂沿一个曲面模板(如球体)的表面运动,使挤出的材料附着在模板上,从而产生变化更加丰富的形态效果。不同于平面打印中机械臂的单一平面运动,曲面打印对机械臂的运动方式提出了更高要求,需要机械臂和加装设备在运动的同时不断改变朝向,从而保证打印材料挤出的方向能够与其所参照的曲面垂直。目前,曲面打印项目多停留在实验室阶段,例如2018年清华大学徐卫国教授带领学生试验了线粒体内膜造型的曲面打印;2021年法国公司XTreeE实现了半球体模板上珊瑚造型的打印(表1d)。

表1 常见的机械臂打印路径规划类型与对应的项目
2 无支撑3D 打印拱顶的打印路径规划构想
3 打印路径规划的技术探索
在清华大学徐卫国教授团队设计的深圳国际会展中心3D打印公园中,研究团队探索了诸多景观小品的打印路径规划形式。本文围绕其中的两个案例,探讨机械臂3D打印混凝土建造在打印路径规划上的新可能。
3.1 变曲面打印:“鹏城花开”雕塑
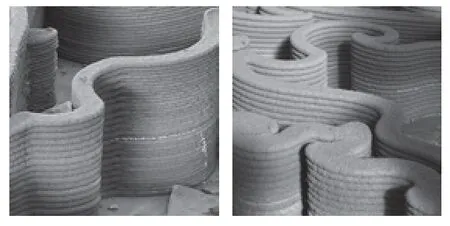
该雕塑的体量约为2 600mm×2 700mm×1 800mm,设计原型为勒杜鹃,为模拟其花瓣有机、无序的形态,雕塑主体设计为数组起伏的曲面。打印路径规划的难点在于,将雕塑拆分为5个独立的分块后,各块仍无法简单用连续变化的平面或者曲面切分(图3)。因此,研究团队使用一组渐变的不规则曲面进行切割,使最顶部的曲面贴合花瓣的上边缘曲线,而底部则根据设计需求分为几组不平行平面。每个分块继而被切分出四部分主要结构(图4):第一部分为雕塑的基础,内部包含了柱状的承托结构,用以支撑花瓣的瓣底,这一部分采用变平面打印,使最上方的打印路径平面与瓣底曲面相切;第二部分为变平面打印的花瓣,结合底部承托结构的变化来支撑瓣底不断悬挑的碗状形态;第三部分则为双层变曲面打印的花瓣,每个花瓣的打印面由一组往返的打印路径组成,保证每层打印材料都具备足够的稳定性与承受力;第四部分则为单层变曲面打印的花瓣,用以固定整个不规则顶面。最终效果如图5、6所示,五个分块分别打印完成后,再吊装至现场装配固定。

3 “鹏城花开”雕塑的分块示意
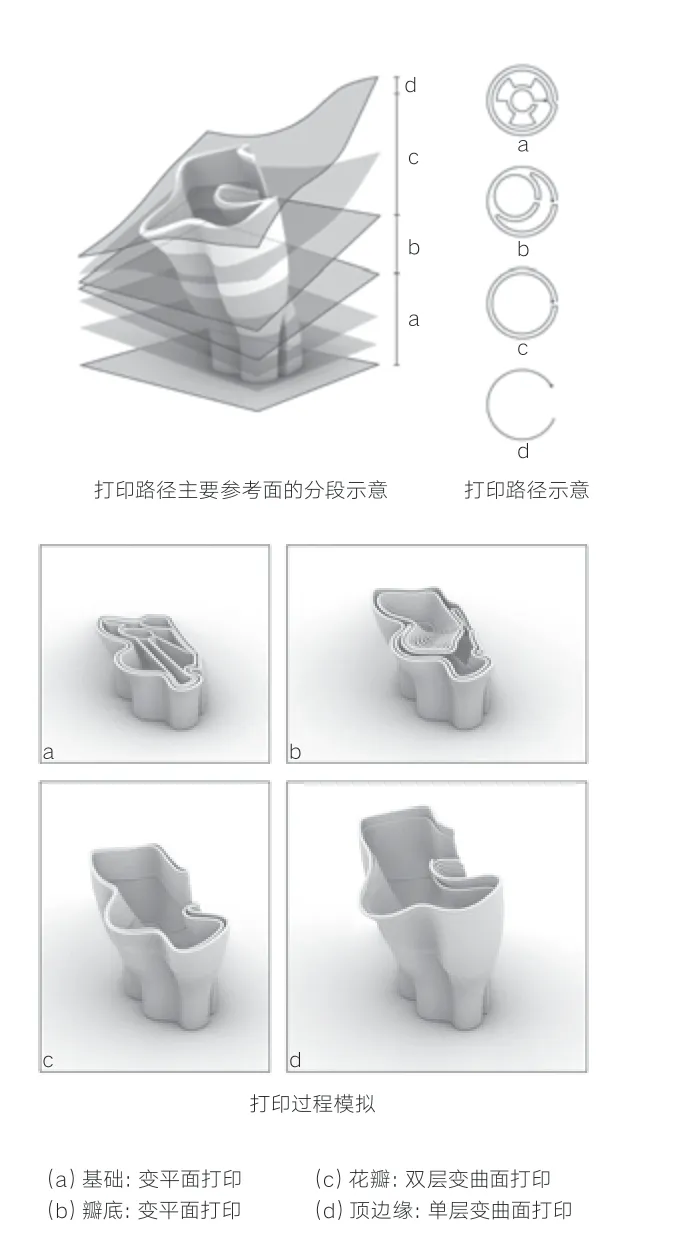
4 “鹏城花开”雕塑的打印路径规划方法

5 “鹏城花开”雕塑打印过程及细部
3.2 间层打印:“宝安”雕塑
“宝安”雕塑的体量约为4 900mm×3 400mm×650mm(图7,8),以项目所在地宝安区的Logo作为展示对象,结合分形曲线算法(Fuzzy—cradle)生成祥云图案。因展示需求,雕塑的最低点高度仅200mm,最高点则有650mm,若采用变平面打印的方法,即便每一层打印路径的最高处层高取20mm,最低处也仅有6mm,且容易在最低处造成打印材料堆积,影响效果;若以顶面为参考面采用逐层打印,则最底部将产生数十种不同路径,因分形图案较为复杂,难以用统一的规律生成(图9)。最终,研究团队尝试先将雕塑细分为19组渐变平面,然后在每个平面内采用间层打印的方法(图10),首层先打印雕塑平面的1/3(a区域),然后打印2/3(b区域),到第三层才完整地打印整个平面(c区域)。依据这样的逻辑,整个雕塑的打印路径可分为两部分,一部分是完整切分雕塑主体的一系列变平面,另一部分是每两个变平面之间用以“找平”的间层。雕塑的变平面在达到设计所需斜度后,于顶部采用水平逐层打印方式完成最后5层打印路径(d区域),以突出展示对象。间层打印的方法最终也使得雕塑侧面呈现出疏密有致的纹理,高品质地实现了平整、准确的顶面效果。

6 “鹏城花开”雕塑现场组装后效果
7 “宝安”雕塑细部

8 “宝安”雕塑组装后效果
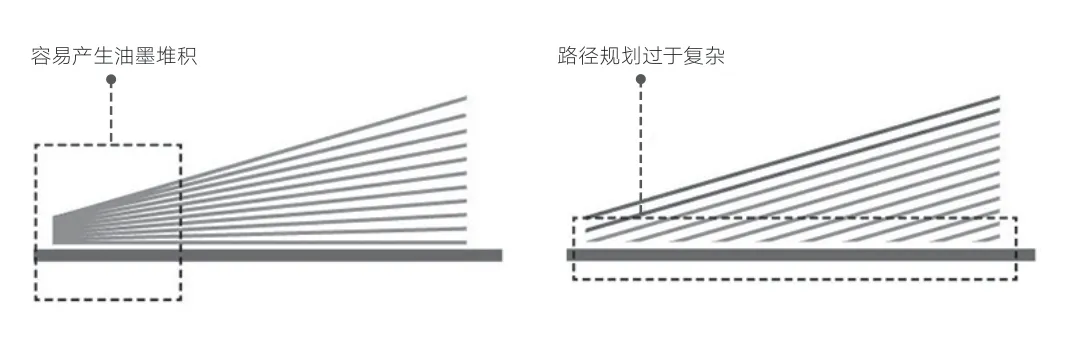
9 “宝安”雕塑存在问题的打印路径规划方案

10 “宝安”雕塑打印路径方案剖面示意
4 结论与展望
综上所述,机械臂赋能下的3D打印混凝土技术具备了更大的形态潜力,为建筑师实现复杂、多样的建筑形式提供了可能。本研究展示了国际上常用的三种机械臂3D打印的路径规划方法,并以此为基础探索变曲面打印、间层打印两种打印路径规划的新思路,以实现复杂形态下更加稳定、精确、快速的混凝土成型。随着3D打印建筑体量与建设需求的增大,机械臂打印路径规划的未来发展方向也必然更加多元,多台机械臂的打印路径协同、实时速度控制、智能打印路径生成,都是行业正在探索的领域。相较于传统施工方式,这些结合了数字化设计与机器人辅助建造的新方法能够有效地提升效率、减少消耗,是建筑业真正走向智能建造的必由之路。
1,2 来源于文献[2]
3,4,9,10 作者自绘
5-8 作者自摄
1 作者自绘,图片来源于文献[11-14]
猜你喜欢
家教世界·创新阅读(2022年6期)2022-06-27
小天使·一年级语数英综合(2020年11期)2020-12-16
智富时代(2019年8期)2019-09-23
智富时代(2019年8期)2019-09-23
中学生数理化·高三版(2019年1期)2019-07-03
中学生数理化·高三版(2019年1期)2019-07-03
好孩子画报(2019年3期)2019-04-28
卷宗(2017年16期)2017-08-30
试题与研究·高考数学(2016年1期)2016-10-13
小朋友·快乐手工(2009年4期)2009-04-28