
某风洞两缸同步液压开环控制系统分析与改进
2022-09-16 13:04顾海涛孙常新朱文杰
机床与液压 2022年6期
顾海涛,孙常新,朱文杰
(中国空气动力研究与发展中心,四川绵阳 621000)
0 前言
液压同步系统,是由两个或多个液压缸/液压马达作为执行器,共同驱动同一负载,运动过程中各执行器速度同步。影响同步的因素主要包括各执行器所承受载荷、摩擦阻力、泄漏、管路、制造安装等。在液压同步系统中,除特殊情况外,一般各执行器型号规格一致,因此各执行器的速度同步主要通过液压回路保证执行器的有效流量相同而实现。根据流量控制方式的不同,液压同步回路可分为节流同步和容积同步两大类,节流同步通常采用节流阀、调速阀、分流集流阀、比例阀、伺服阀等作为控制元件,容积同步则以采用等排量的多联液压泵作为控制元件比较常见,具体采用的控制元件与回路设计依据工况需求而定。
1 两缸同步开环控制系统分析
国内某风洞中的机构中较多采用两缸/多缸同步。以喷管段侧壁为例,每块侧壁由2只油缸驱动,沿轮轨横向运动,侧壁与喷管段合拢到位后,由上下2排螺栓紧固。侧壁轮轨无精确导向能力,而为保证侧壁运动过程中不发生侧偏,主要依靠2只驱动油缸同步运动。侧壁打开/合拢运行频次较低,只有在定期维修或喷管段其他机构等遇到故障时,才需动作,动作时保证两缸同步至关重要,以避免轨道别卡的险情或导轨及侧壁结构损伤的风险。
原两缸同步系统原理如图1所示,油源与喷管段上下壁板32只并联油缸共用1套低压油源,喷管段上下壁板32只并联油缸采用“低压成型、高压锁紧”的运行模式,即各液压缸动作时采用低压,到位后采用高压进行锁紧。油源包括高压和低压共2套,其中低压油源与侧壁液压系统油源共用。系统压力通过先导式溢流阀3设定为3 MPa,压力油通过三位四通电磁换向阀4.1供往侧壁两油缸,油缸6.1的进回油路设置回油节流阀5.1、5.2,油缸6.2的进回油路设置回油节流阀5.3、5.4,两缸同步主要通过节流阀与溢流阀构成的回油节流调速系统保证,运动速度约5 mm/s。由于节流阀的流量不仅取决于节流口面积的大小,还与节流口前后压差有关,阀的刚度较小,受负载变化影响较大。在风洞投入使用之初,尚能满足两油缸500 mm全行程同步误差10 mm的同步能力;随着使用年限的增加,侧壁载荷分布与驱动油缸的负载特性均发生一定变化,导致油缸同步性越来越差,且反复优化节流开度效果有限,在近年几次侧壁运动的过程中,均出现了由于油缸运行不同步(前后两只油缸位移差约20 mm)导致侧壁与轨道别卡的险情。

图1 原侧壁液压系统原理
作者综合对比了两缸液压同步的几种改进方案:
(1)以调速阀为主要控制元件,构建同步回路。调速阀是由定差减压阀与节流阀串联而成的组合阀,增加了节流前后的压力补偿,使节流阀前后压差保持定值,刚度优于节流阀。但此系统压力较低,调速阀进、出油腔最小压差受限,同时随着使用磨损增大,内泄漏量增加风险较高,可能会影响到最小稳定流量,以调速阀为主要控制元件的同步效果在此低压小流量场合可能受限。
(2)以分流集流阀为主要控制元件,构建同步回路。分流集流阀是一种同步控制阀,是利用负载压力反馈的原理,来补偿因负载压力变化而引起流量变化的一种流量控制阀,其作用是按一定的流量比例同时向两个液压缸或液压马达供油(分流)或接收回油(集流)。但分流集流阀通常可以达到的同步精度为4%~5%,且压力补偿特点与调速阀的问题相同,同步效果在此低压小流量场合可能受限。
(3)以比例阀或伺服阀为主要控制元件,构建同步回路。通常基于比例阀或伺服阀,结合油缸位移传感器构建电液闭环系统,通过合理的控制策略、控制算法,能够获得较高的同步精度。但考虑到此类系统造价高、抗污染能力差以及对使用和维护的要求较高等实际问题,与此工况需求的契合度较低。
(4)以等排量的多联液压泵作为控制元件,构建容积同步回路。由于组成多联泵的实际排量及容积效率不完全相同,各泵与液压缸之间容腔的体积也不可能完全一致,再加上液压缸的泄漏以及偏载等因素的影响,常规容积同步回路的实际同步精度往往只能控制在5%左右,且如果采用此方案,还涉及对共用低压油源的改造,与此工况需求的契合度较低。
此外,液压同步方案还包括由节流调速或容积调速基本回路衍生的一些同步方案以及节流调速、容积调速相结合的方案等。如前文介绍,此系统运行频次低,使用维护成本要求尽可能小,但两缸速度平稳性要求较高且需同步,因此作者重点考虑了基于液压同步马达的开环控制方案。
液压同步马达是由加工精度较高、尺寸相同的若干个液压马达组成。相同的尺寸和较高的加工精度,使得通过每一个液压马达的流量(排量)近似相同;再者,由于液压执行器的截面积(或排量)相同,从而实现速度同步。液压同步马达精度较高,但实际使用中还存在着明显的误差,其同步精度主要受以下一些因素的影响:液压马达及液压执行器的加工精度;负载的均匀程度;液压管道的布置;介质中气体的含量、泄漏等。
2 改进的同步方案
此系统两油缸规格相同,缸径200 mm,杆径100 mm,运行速度约5 mm,要求两油缸500 mm全行程的同步误差不超过10 mm,即有效流量的开环控制精度需达到2%以内。
液压马达选择齿轮式同步马达,它能够在较低系统压力下工作,且具有体积小、质量轻、结构简单、内部压损小、工艺性好、对油污染不敏感以及成本低廉等优势,同步误差为±1.5%~±2%。对于两联齿轮分流马达,分流时的同步误差跟各联马达的内泄漏有关,且正比于两出油口压差。此系统油源压力通过溢流阀调定为3 MPa,两油缸工作压力通过排气测压接头测得分别为2.0、1.9 MPa,同步马达两出油口压差工况较好,同步误差能达到±2%以内。通过查阅产品样本,选用HANSA的9RV-02A27,马达排量为4.3 mL/r,计算可得油缸以5 mm/s速度运行时,齿轮转速在2 200 r/min左右,同步马达处于在此工作区间流量控制能力很好,基本满足需求。同步马达特性曲线见图2。
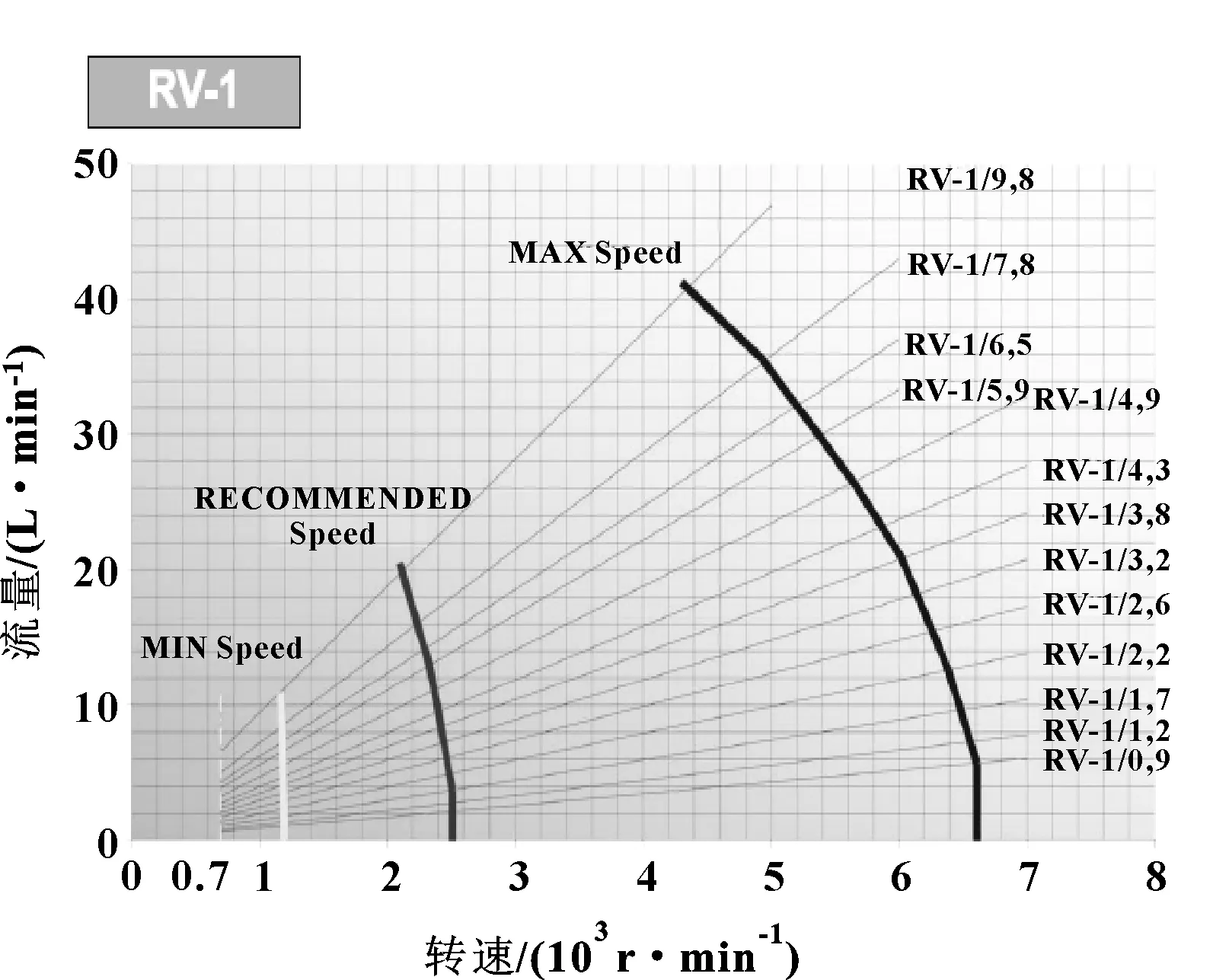
图2 同步马达特性曲线
考虑到作为执行器的油缸,其加工精度已无法改变,只能通过适当维护尽量提高其摩擦、泄漏等性能一致性,阀组的布局限制也决定了管路长短有别,侧壁板的负载分布又只能适应现状。因此,改进的同步方案主要利用齿轮式同步马达对供往两只油缸的主路流量进行等分,旁路采用小流量精密单向调速阀进行流量补偿以保证同步效果。
需要补偿的系统流量(机泵组流量):
=··=0.025×970×0.85=20.6 L/min
单缸以5 mm/s速度运行的流量需求:

Δ=·=10.3×2%=0.21 L/min
Δ′=′·=9.42×2%=0.19 L/min
同步马达出油口的流量波动:0.19~0.21 L/min。
更换密封件维保后两油缸内泄漏量通过量杯实测分别为
=0.4 L/min
=0.5 L/min
因此旁路单向调速阀需要补偿的流量为0.29~0.71 L/min。再综合考虑管路长短差异的影响,选用2FRM-5小流量精密型单向调速阀,最大流量1.2 L/min,该阀特性曲线如图3所示。通过查阅产品样本,其小流量输出受压差变化影响较小,性能非常稳定。
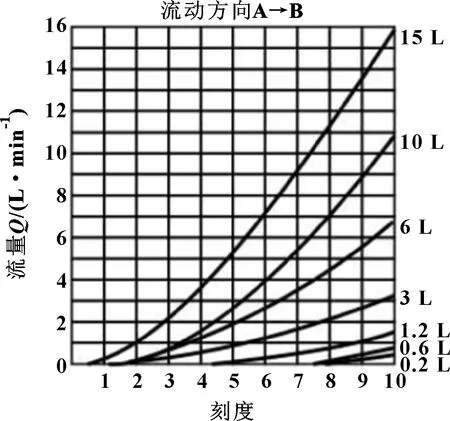
图3 2FRM-5型调速阀特性曲线
通过在旁路采用此小流量精密单向调速阀预置开度进行流量补偿,相较于通过电磁阀根据反馈信号自动进行旁路补油,对油缸速度稳定性更加有利。
改进的同步方案中油源、油缸沿用之前设备,以新的液压同步回路替换原节流调速回路,并在各油缸进、回油路增设截止阀以完善单点油缸调节功能。图4为改进后的液压原理图。新的液压同步回路由手动换向阀、液压同步马达、单向调速阀、单向阀、截止阀等组成。液压同步马达共两只,同步马达3.1的两个出油口分别经单向阀4.1、4.2,截止阀5.1、5.2与两油缸6.1、6.2无杆腔连通,单向调速阀2.1、2.2与液压同步马达3.1并联,分别经截止阀5.1、5.2与两油缸6.1、6.2无杆腔连通;同步马达3.2的两个出油口分别经单向阀4.3、4.4,截止阀5.3、5.4与两油缸6.1、6.2有杆腔连通,单向调速阀2.3、2.4与液压同步马达3.2并联,分别经截止阀5.3、5.4与两油缸6.1、6.2有杆腔连通。换向阀为手动,减少对电气依赖程度,并设置2只,提高系统冗余度。
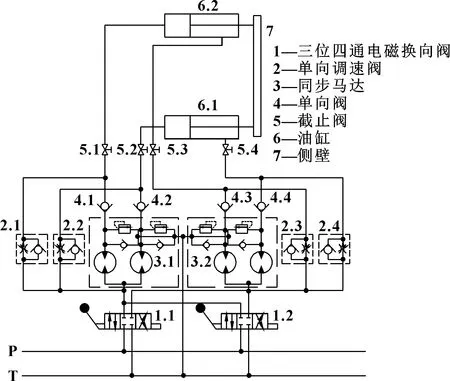
图4 改进的液压系统原理
当侧壁需要运动时,将上下两排紧固螺栓松脱,启动低压油源。两油缸伸杆时,现场手动将换向阀切换至左位,压力油经过换向阀供往单向调速阀2.1、2.2和同步马达3.1,同步马达在同一转轴的带动下以相同流量分别供往油缸6.1、6.2的无杆腔,驱动油缸伸杆运动。同时同步马达内部每一条油路上都含有一个溢流阀和单向阀,当某一油缸出现别卡或首先到位时,油路压力升高至溢流阀设定值时,溢流阀开启溢流保证安全;而当管路中出现吸空趋势时,通过单向阀自动补油提高稳定性。同步马达3.1通向油缸6.1、6.2的无杆腔两路输出虽然流量相同,但油缸的速度还受油缸摩擦、泄漏等性能差异、管路长度不同、负载不均等影响,此时单向调速阀2.1或2.2会从旁路为油缸6.1或6.2的无杆腔进行流量补偿(单向调速阀为预置开度,具体开度通过调试确定),最终保证两油缸无杆腔有效流量相同进而实现同步伸杆。此时油缸6.1、6.2的有杆腔回油通过单向调速阀2.3、2.4中的单向阀与换向阀的回油路连通,在单向阀4.3、4.4的作用下,回油不经过同步马达3.2,不会造成扰动。当两油缸缩杆时,现场手动将换向阀切换至右位,压力油经过换向阀供往单向调速阀2.3、2.4和同步马达3.2,同步马达在同一转轴的带动下以相同流量分别供往油缸6.1、6.2的有杆腔,驱动油缸缩杆运动。此时单向调速阀2.3或2.4会从旁路为油缸6.1或6.2的有杆腔进行流量补偿(单向调速阀为预置开度,具体开度通过调试确定),最终保证两油缸有杆腔有效流量相同进而实现同步缩杆。此时油缸6.1、6.2的无杆腔回油通过单向调速阀2.1、2.2中的单向阀与换向阀的回油路连通,在单向阀4.1、4.2的作用下,回油不经过同步马达3.1,不会造成扰动。
3 同步方案调试注意事项
改进的方案在调试初期,单向调速阀不工作时,同步马达实现两缸全行程同步误差12 mm,然后对应反复优化单向调速阀开度,最终两缸全行程同步误差3 mm。调试过程中,需实时检测两缸速度,运动过程中,遇到超差过大时(超过10 mm)及时停止运动,通过关闭截止阀5.1、5.3或5.2、5.4,位置追回一致后,匹配单向调速阀开度,开展下一轮调试。
两缸到达行程末端后,换向阀继续保持当前工位,增加延时5 s,消除累积误差。溢流压力的调定需要与负载匹配,若压力设置很高,影响消除同步误差;若压力设置很低,负载大的液压缸尚未启动就因升压而溢流,影响同步效果。一般来说,溢流阀的调定压力比负载液压缸工作压力高约2 MPa,此回路中,油缸工作压力为3 MPa,溢流阀调定压力为5 MPa。液压介质中含有气体会影响同步精度,所以新系统安装后调试前首先需进行排气操作。此系统通过油缸上的排气阀进行排气操作。同时需注意调试过程中油温控制在15~50 ℃,降低油液在高温下泄漏性能变化的影响。
4 应用效果
此系统同步回路阀组布置在原阀组位置,手动换向阀设置在阀组上方洞体横梁处,便于操作。同时为了提高后期使用的安全性,为新系统增设一套状态检测系统,主要由PLC模块、拉绳编码器、显示屏等组成。拉绳编码器检测油缸位移,通过数字量输入模块进行采集,通过总线接口与PLC模块连接,油缸运行状态信息直接反馈到现场显示屏,当两油缸出现同步超差时能够及时给出报警指示,如图5所示。两只拉绳编码器分别安装在两个洞体立柱上,在编码器与侧壁外框架法向相交处焊接拉绳挂孔,拉绳通过挂钩连接,确保采集值与油缸运行位移量一致。
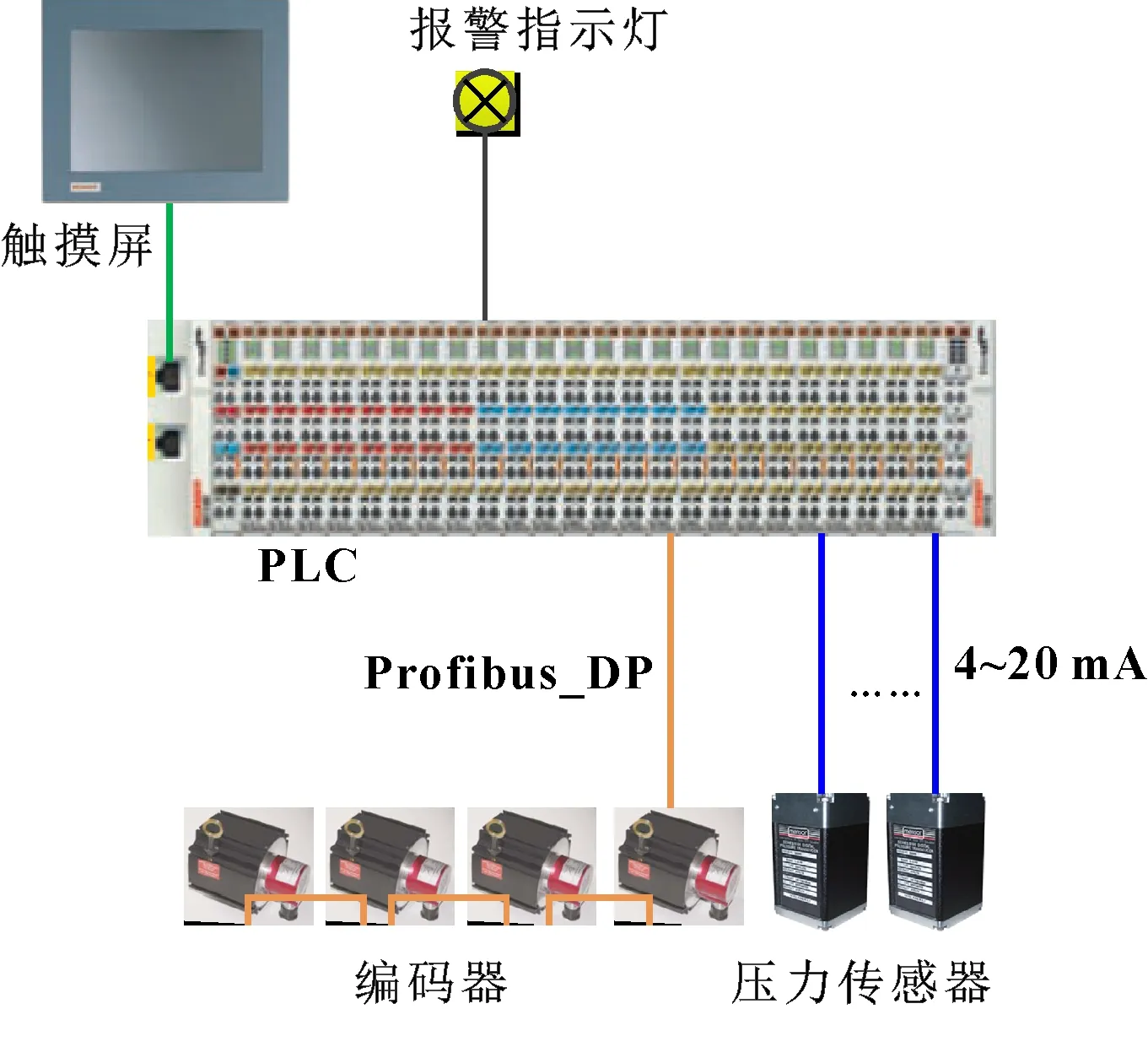
图5 状态监测系统
同步控制系统完成安装、清洗、排气后,首先单独动作,通过机械测量与拉绳编码器反馈信号进行校核,然后通过检测10、40、70、100 s四个时间标记点对应的两油缸位移差,开展10轮反复调试优化。最终两缸全行程同步差在3 mm以内。将单向调速阀调节量固化后,又进行了5个全行程往复动作验证,同步效果比较稳定,完全达到预期要求。摘选的首次与末次调试数据见表1和表2。
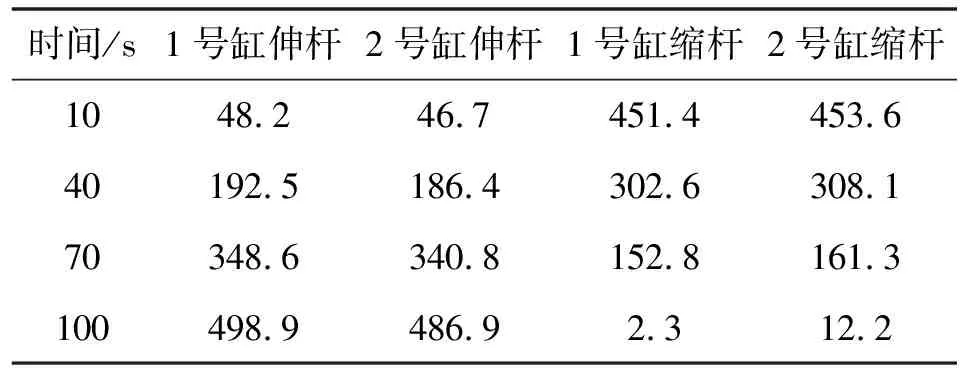
表1 首次位移调试数据 单位:mm
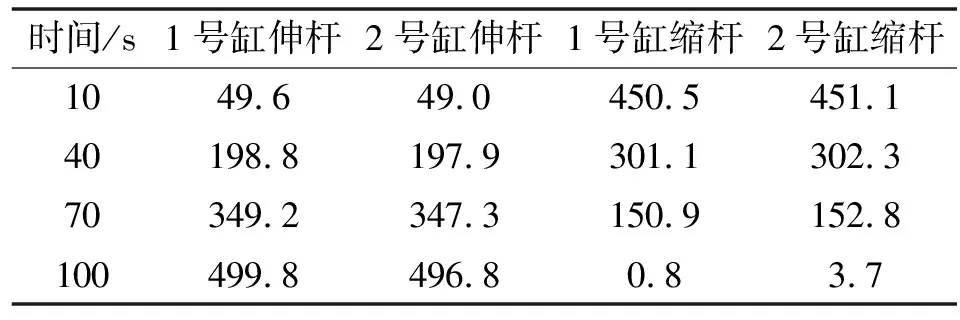
表2 末次位移调试数据 单位:mm
改进工作2019年完成,现场实物如图6所示。调试完成后,为兼顾工程实用性,状态检测系统的超差报警值由原10 mm提高到5 mm。在近两年的数次侧壁打开/合拢运行中,同步效果比较稳定,两缸全行程同步差始终在3 mm以内,实用效果得到较高认可。风洞中其余几套类似需求的系统正在筹备推广采用此种同步方式。

图6 改进后的液压同步系统
5 结论
某风洞两缸同步液压系统,主要是基于齿轮式同步马达的同步能力,再合理配置单向调速阀进行流量补偿构建开环同步回路,取得良好了实用效果,为风洞试验安全顺利进行提供有力保障。实际使用证明:在油源压力较低的工况下,液压马达的同步能力,相比其他预置型流量调节阀具有一定优势;再根据具体系统的实际情况,合理配置流量补偿回路,能够达到很高的同步精度,且速度稳定性较好。当然,后期使用过程中载荷及油缸特性等可能发生变化,开环同步回路需根据运行情况,灵活调整流量补偿元件的设定值,以保证同步效果。
猜你喜欢
汽车零部件(2022年5期)2022-05-30
煤气与热力(2022年3期)2022-03-29
科学与财富(2021年35期)2021-05-10
电焊机(2020年3期)2020-09-10
中国建筑金属结构(2019年4期)2019-05-15
出版人(2019年4期)2019-04-16
阅读(书香天地)(2018年12期)2018-05-14
科技创新与品牌(2017年9期)2017-10-20
文苑·感悟(2017年2期)2017-02-07
集装箱化(2016年8期)2016-10-20
