基于空基平台的激光通信技术研究和展望
2022-09-13 05:50:18张金刚周广铭张大铭于思源谭立英
宇航总体技术 2022年4期
张金刚,周广铭,张大铭,于思源,李 博,马 晶,谭立英
(1.北京宇航系统工程研究所,北京 100076;2.哈尔滨工业大学航天学院,哈尔滨 150001)
0 引言
我国在信息通信网络研究和建设中取得了巨大的进步,特别是5G的发展与建设已经走在世界前列。在国家发展战略中,天地一体化网络是我国正在建设的信息化重要基础设施,在保障和拓展国家利益、维护国家安全、促进国民经济发展、提高我国国际影响力等方面具有重大意义。天地一体化网络重大项目能够有效解决我国信息网络建设整体不平衡的问题,为各类用户提供“随遇接入,安全可信”的服务。在天地一体化网络建设中,基于空基平台的通信网络建设是实现应用落地、国防通信能力提升的关键环节。
空基平台包括飞机、无人机和飞艇等在天空中运动的平台。空基激光通信具有独特的优势,通信建立的机动性更强或者在移动通信网络的建立中可当作转接站。同时,激光通信相比于微波通信,具有良好的抗电磁干扰特性和高保密性,同时还可以提供新的较宽的通信频带。另外,激光通信还具有通信速率高、通信容量大以及功耗低等优点,非常适合用于空基平台。目前,各国都重视对空基平台激光通信的研究,特别是对其中机载激光通信系统的研究。美国在激光器发明之初就对激光通信进行研究,在21世纪初欧洲与日本也进行激光通信的研究。
在空基激光通信应用的背景下,本文首先概述了空基激光通信网络结构,然后阐述了国内外空基激光通信研究进展,在此基础上对空基激光通信技术所面临的问题和未来发展趋势进行分析和总结。
1 空基激光通信网络结构和应用
空基激光通信技术发展和应用的主要目标是实现全球范围内覆盖的数据通信链路网络,并和地面现有的网络连接,以便及时反馈和利用空间激光通信传输数据。空间激光通信链路技术从最初的点对点通信朝向激光通信网络方向发展。天地一体化网络示意图如图1所示。从图1中可以看到,空基平台激光通信是天地一体化网络建设中的重要组成部分。空基激光通信链路依据通信对象所在位置的不同分成3类:空基平台-卫星平台通信链路、空基平台-空基平台通信链路、空基平台-地面通信链路。围绕空基平台可以展开空-空、空-星、空-地、空-船等链路通信。

图1 天地一体化网络示意图及拓扑结构[2-3]Fig.1 Integrated network of space and earth[2-3]
空基激光通信网络在军用和民用上将有重要应用。现有的国内外军事网络体系中,主要以微波、电缆和光纤作为宽带宽通信的基本保障,而在偏远地区作战时,需要在没有地面有线网络设施的条件下,提供和光纤通信容量相当的机动数据传输能力,或在强电磁干扰环境下实现高可靠通信,这时激光通信技术就显现出了无可替代的优势。因此,很多国家在激光通信的研究中投入大量资金、人力以及技术支持,期望能够在现代信息化战争中占据先机,提高信息化战斗能力,提升国家的国际地位。同时,在近几场高科技局部战争中,无人机在侦察、搜索、欺骗、干扰、定点清除等方面的突出表现令全世界对其潜在的军事价值有了更深刻的认识,以无人机为节点的激光通信链路已经成为研究热点。空基激光通信在民用方面同样具有巨大的潜力。在部分大型民航客机飞行中,乘客依旧不能使用手机等移动通信设备进行通信。原因一是乘客的手机信号会干扰到飞机与航站楼之间的通信,影响飞机飞行安全;原因二是机载的微波通信无法满足乘客通信速率的需求。在民航飞机上装载激光通信终端可以解决以上两个问题。
空基激光通信系统由3个部分组成,分别是空间光收发单元、光束捕跟单元以及通信信号处理单元。空间光收发单元负责发射和接收在空间传输的信标光及信号光;光束捕跟单元利用粗精跟踪控制组件进行信标光指向、捕获和跟踪,以建立稳定的激光链路;通信信号处理单元负责激光信号的编解码、调制、解调和储存。
2 国内外空基激光通信研究试验进展
我国从20世纪90年代开始了激光通信的研究,前期主要研究卫星激光通信技术,近年来逐渐向空基、地基等方向的激光通信技术发展。长春理工大学侧重于机载激光通信,开展了多项外场试验,实现了飞机间百千米距离的1 Gbit/s激光通信;武汉大学和中电34所主要研究地面点对点激光通信,实现了地面数千米至数十千米间的高速激光通信。
美国一些研究机构在激光器发明不久之后就针对激光通信技术展开了各类研究,其中美国的空军研究实验室(AFRL)从20世纪70年代开始就对激光通信技术在机载平台上的应用开展了研究。国外空基激光通信的主要研究试验情况如表1所示。

表1 国外一些重要的空基激光通信试验Tab.1 Foreign experiments of air-based laser communication
1980年,美国AFRL在白沙靶场搭载KC-135飞机进行了试验,第一次成功演示了机载对地激光通信系统。通过脉冲间隔调制(PIM),实现了20 kbit/s信标通信,平均误码率小于10,20 km距离试验测量误码率在10~10之间。
1984年,美国军方资助的HAVELACE项目实现了相距160 km的两架KC-135A飞机之间的激光通信试验,获得了通信速率为19.2 kbit/s、误码率优于10的试验结果。该试验采用手动执行捕获,导致两个移动飞行平台之间的初始捕获异常困难,但是一旦捕获成功,链路便保持稳定跟踪。
1995年,在AFRL支持下,Thermo Trex公司研发了新一代机载激光通信系统RILC。在1996年成功进行了飞机对地面站间20~30 km的激光通信试验,通信传输速率1 Gbit/s,突破了空地激光通信关键技术。
1998年,Thermo Trex公司又实现了空基平台间50~500 km距离、1 Gbit/s激光通信试验,突破了空空平台间激光通信关键技术。然而,由于管理及技术原因,研发遇到问题而陷入停滞,只是在2004~2005年之间进行了部分试验,2005年该项目便终止了。
1998年,美国海军实验室在也开始光通信技术的研究,其制作的猫眼型调制反射镜MRR可以实现与其制作的双模光学询问器(DMOI)进行7 km距离、45 Mbit/s的单向通信。2012年开始开发微型DMOI模块安装在无人机上,该模块可以与地面进行25 km、155 Mbit/s的通信,还可以与MRR进行1 km、2 Mbit/s的通信。该项试验验证了单端捕跟控制实现低速激光通信的可行性。
2003年,AFRL开始了一个全新的项目ESTER。这个项目的目标是尽量利用商用技术和货架产品来研发机载激光通信端机。这个项目的端机被称为FALCON。在2011年完成了飞机对飞机激光链路通信试验,通信速率2.5 Gbit/s,通信距离 94~132 km。
2003年,美国NASA下属的JPL 实验室研制的第二代OCD系统进行了空对地激光通信链路APT演示验证试验。系统主要技术指标为:高空无人机的飞行高度为18~23 km,跟踪精度18 μrad,通信速率实现2.5 Gbit/s,通信波长1 550 nm。该项试验验证了无人机平台下的小型化激光通信终端链路能力。
2003年,欧洲也积极研究空基激光通信,欧洲空间局(ESA)开展了CAPANINA项目。在2005年的气球试验中第一次从高度20 km的平流层向远处距离64.3 km的地面发送1.25 Gbit/s的数据,误码率低于10。该项试验对球载平台在大风干扰下的链路性能变化进行了评估。
2006年,美国AOptix公司将自适应光学引入激光通信,开展自由空间光学试验网络试验(FOENEX)项目,目标是使用带有自适应光学(AO)系统的10 cm口径天线进行50 km空-地和200 km空-空激光通信组网试验研究。2009年,完成了安装在P68式飞机和LCT-5地面站之前多频道数据2.5 Gbit/s的通信。但在2012年的最终试验中,该系统在空-地和空-空通信中都出现时断时续的不稳定性。该项目证明AO可以提高接收到的通信性能,但在移动平台上使用AO需要更高的校正带宽和更高阶的像差校正。
2006年,法国成功地在静止轨道Artemis卫星与飞机间建立了空-星激光通信链路,空基平台飞行高度约10 km。利用激光通信,实现了40 000 km双向50 Mbit/s的激光通信链路。该试验验证了强度调制/直接探测在较强大气湍流条件下工作的可行性。
2008年,德国航空航天中心(DLR)的ARGOS项目利用了Do-228飞机与地面站之间的空间激光通信验证试验。通信距离为10~85 km,通信速率为155 Mbit/s。2010年,进一步实现通信距离为10~100 km、通信速率为1.25 Gbit/s的演示验证。激光载荷的安装位置如图2所示。

图2 安装在Do-228飞机上的激光通信载荷[17]Fig.2 Laser communication terminal mounted on Do-228[17]
2009年,美国麻省理工学院完成的飞机与地面站之间激光通信试验,飞行高度3 657 m,通信速率2.5 Gbit/s,链路距离25 km。
2013年,德国航空航天中心在DODfast项目的支持下,完成了“狂风”战斗机与地面移动站之间的激光通信测试试验,如图3所示。其通信速率为1.25 Gbit/s,通信距离大于50 km,飞机速度大于200 m/s。

图3 狂风战斗机搭载激光通信终端[19]Fig.2 Laser communication terminal mounted on Tornado fighter[19]
2016年,Facebook公司拟建设无人机无线光网络,以Aquila无人机为空中激光节点,预计建成之后可为全球十多亿人提供WiFi服务。该无人机飞行高度18 km,利用太阳能充电,滞空时间长达3个月。
2017年,通用原子公司在空基激光通信系统中演示(ALCOS)项目中的无人机激光通信载荷,其安装在MQ-9 Reaper死神无人机上与GEO卫星进行高速激光通信,采用机身安装的方式将无人机安装在飞机的前部,如图4所示。在演示试验中,该项目实现了通信速率为1.8 Gbit/s、通信距离达到上千米的激光通信试验。无人机平台对激光通信终端质量和功耗要求严苛,且平台稳定性差,对实现数万千米的空星链路,技术难度极大。

图4 死神无人机激光通信载荷安装位置Fig.4 Laser communication terminal mounted on the Reaper drone
3 空基激光通信关键技术分析和未发展趋势
3.1 空基激光通信面临的问题
空基激光通信网络是天地一体化建设中的关键环节,将目前以地面信息网络为主的网络边界,扩张到空中领域的全方位覆盖。切实完成了“国家利益到哪里,信息网络覆盖到哪里”的战略需求。要想实现空基激光通信网络的建设目标,主要面临以下4个方面的难点。
1)空基平台振动扰动:空基平台具有低频扰动和高频振动的特性,这对激光通信系统的瞄准、捕获、跟踪(Pointing、Acquisition、Tracking, PAT)都有不同程度的影响。空基平台的振动与卫星平台的振动具有一定的相似之处,但也表现出其独有特点,相似处体现在振动幅度都随着频率的增加而快速减小,其特点在于低频振动的振动幅度更为剧烈,对比效果如表2所示,这将严重影响系统的PAT效果。

表2 振动情况对比Tab.2 Comparison of vibration conditions
2)强天空背景光:由于地表大气散射的影响,近地表面天空背景光光强远超星际通信天空背景光。通常情况下的星载激光通信终端接收到的恒星背景光功率为10~10W,而空基激光通信终端接收到的天空背景光强度受到天顶角、观测方向、观测时间以及大气光学厚度的影响,背景光功率比星载终端高2~3个量级。这样强的天空背景光将严重影响信标接收和通信接收单元的性能,使得接收信噪比很低,增加通信误码率并且降低了捕获概率。所以在终端设计中应该考虑滤除天空背景光的相关设计。
3)高动态特性:首先空基激光链路相比于星地激光链路通信距离较短,相对运动角速度较大,使得动态跟踪难度增加,跟踪精度降低。本文应用STK进行数据仿真,得到的数据如图5所示。图5(a)为地面站与空载平台在跟踪状态下的方位俯仰轴跟踪速度和通信距离数据,空载平台选择速度为700 km/h的民航飞机,飞行高度为10 km。图5(b)为地面站与卫星平台在跟踪状态下的方位俯仰轴跟踪速度和通信距离数据,卫星平台选择低轨卫星,轨道高度为1 200 km。通过数据分析可以发现,空载平台下的动态跟踪速率是卫星平台下的2倍以上,因此需要优化跟踪策略,提高系统的跟踪能力。

(a)空载平台跟踪角速度和距离

(b)卫星平台跟踪角速度和距离图5 两种平台跟踪角速度和距离分析Fig.5 Analysis of tracking angular velocity and distance of two platforms
4)大气影响:无论是空-地、空-空还是空-星通信链路,大气信道特性都是激光链路通信中需要面临的重要难题。不同的大气条件对激光具有不同程度的吸收和散射效果,使接收光斑产生严重的畸变,如图6所示,严重情况下造成系统的跟踪精度下降。接收端光功率也会受到不同程度的严重衰减,同时会引起接收光功率波动,严重影响通信效果,使通信误码率增加。激光通信解调器接收到的信号光强度浮动较大,需要动态调整接收机的光强探测范围,才能正确解调出激光携带的信息数据。

(a)未经过大气传输的接收光斑

(b)经过大气传输的接收光斑图6 大气传输对接收光斑的影响Fig.6 Effects of atmosphere transmission on receiving spots
3.2 空基激光通信关键技术
随着无线激光通信技术的发展,部分难点已找到相应的解决方案,促使空基激光通信网络建设日益完善,其关键技术总结如下所述。
1)高精度主被动视轴稳定技术:对于空基激光通信系统,由于空基平台不稳定会造成开环指向角度的剧烈变化,通过配备角速率陀螺仪和捷联导航设备的方式快速测量姿态角数据,并利用卡尔曼滤波算法预推测姿态角,实时调整激光通信终端的瞄准指向,保证主被动视轴的相对稳定。该方法具有计算量小、迭代速度快、开发成本低的优点,同时还有较好的抗振能力。为了优化控制器的动态模型,提高控制器对干扰和不确定项的鲁棒性,应用滑模变结构控制实现激光通信终端对空基平台姿态变化参考轨迹的跟踪,为快速开环捕获和高精度动态跟踪奠定了基础。
2)PAT技术:空基平台具有运动速度快、飞行路径不确定的特点,会不同程度地增加瞄准、捕获、跟踪难度。同时,激光的波束非常窄,对于高速运动的目标来说,想要直接对准并保持稳定跟踪相当困难。应用粗精复合轴控制技术,将低频的大偏转量交给粗瞄准机构(轴系电机)进行补偿,把高频的小偏转量交给精瞄准机构(压电陶瓷偏转镜)进行快速调节,可有效提高PAT的效果。
3)大气信道补偿技术:大气对空基激光通信链路会产生一定的干扰,主要体现在激光在大气中传输时受到的大气衰减、大气湍流效应,这是高数据率通信不可忽略的影响因素。由于大气衰减造成的光功率损耗无法避免,但可应用大功率发射及高灵敏度接收技术来弥补。应用自适应光学技术可以有效补偿由于大气湍流造成的光束强度起伏、相位起伏、光束扩展、光束漂移、像点抖动等现象。该项技术可以有效补偿大气的各类影响,为空基激光通信信道传输提供了技术支持。
4)光学基台小型化设计:空基平台的载质和功率都有限,特别是针对无人机平台,更需要加小型的终端以满足平台对质量和功率的限制。目前,国内外报道的无人机激光通信载荷质量已经降低到10 kg以下,其主要技术途径是对终端进行静力学、动力学和热力学分析,采用叠层结构设计,实现紧凑的空间布局,选择轻型、抗机械形变的材料,并运用新型晶体结构替代传统的轴系结构完成粗瞄准过程,大大减少了结构的体积和质量。
3.3 空基激光通信的发展趋势
随着空基激光通信技术的飞速发展,通信速率越来越快,如图7所示。通信速度已经从最初的20 kbit/s发展到了现在的2.5 Gbit/s,未来还要向太比特每秒的速度发展,将在高速通信领域逐步发挥出激光通信技术的优势。
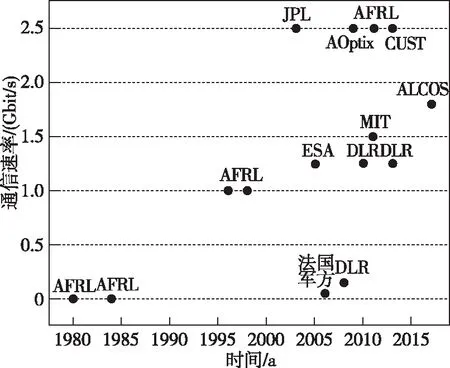
图7 国内外历年空基激光通信试验传输速率Fig.7 Transmission rate of air-based laser communication
空基激光通信可将侦察到的海量原始数据实时向中继卫星或地面站传输,如有战争或者局部冲突爆发可以快速布局,进行全方位立体侦察,搜集敌方作战相关信息,打击敌方部队。同时,也可以在敌方强磁干扰下快速建立通信,保证远程指挥和情报的实时传输,防止敌方破坏干扰和窃听,具有较大的实战意义。
空基激光通信的发展趋势总结如下:
1)在终端研制技术方面,重点向小型化、轻量化和低成本方向发展,同时需要提前布局终端的批量化生产能力;
2)在链路系统技术方面,重点发展AI技术和多源信息融合技术,以提升空基激光链路和网络的可用度和稳定性;
3)在应用领域方面,将从空-空、空-地、空-星链路发展至天地一体化网络系统应用,在完成高速数据传输基础上,逐步向网络数据中继方面发展,将成为今后空天网络系统的重要组成单元。
在未来的空中骨干网络建设中,可在空基平台上采用激光通信和射频通信互补,与卫星平台、地面站共同组成天地一体化网络。该网络在军事上,应用于无人机、临近空间飞行器、预警机与地面或者其他指挥节点大数据传输,快速部署空基通信单元等。在民用上,可以满足大型客机网络通信需求,实现航行过程中无间断网络服务。同时,飞艇、系留气球等空基平台也可以作为星地激光通信的中继节点。
4 结论
本文通过分析国内外空基激光通信技术的发展情况,总结出该项技术面临的各类问题以及关键技术,并预计了其未来的发展趋势。空基激光通信可解决现有微波通信数据率低、抗干扰能力差、保密性低和频段使用受限等瓶颈问题,是今后空基平台数据传输的重要发展方向。与卫星激光通信技术相比,空基激光通信的平台动力学环境、温度环境等更为恶劣,对技术发展提出了新的挑战,同时也给我国科研人员提供了多类技术发展方向。相信在不久的未来,空基激光通信将会逐渐从试验走向工程应用,将在信息化战争中发挥重要作用。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:10
移动通信(2021年5期)2021-10-25 11:41:48
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
电子产品可靠性与环境试验(2020年2期)2020-12-14 12:14:35
科学(2020年5期)2020-11-26 08:19:24
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
大陆桥视野·下(2017年5期)2017-06-19 01:20:38
北京航空航天大学学报(2016年7期)2016-11-16 01:50:54
现代防御技术(2016年1期)2016-06-01 12:13:27
发明与创新(2015年30期)2015-02-27 10:39:52