
肩部康复外骨骼拟人化机构设计与研究
2022-09-02 03:23朱德海张继国
制造业自动化 2022年8期
朱德海,张继国,王 昊,李 坤*,徐 楠
(1.山东建筑大学 机电工程学院,济南 250101;2.山东建筑大学 信息与电气工程学院,济南 250101)
0 引言
近年来,受高血压、糖尿病、血脂异常、吸烟、酒精摄入、腹型肥胖等因素影响,中国脑卒中患者呈现快速增长状态,极大影响了人类的健康生活。据全球疾病负担出具的数据指出,截止到2016年,我国第一寿命年损失(YLL -Years of Life Lost)病因是脑卒中[1]。其发病率为每10万人中有401.1人发病,且从2005年至2016年,缺血性脑卒中患者从每10万人中170人增至270人[2]。2007~2008年患者在3个月、半年、1年的复发率分别为1.9%、13.4%、14.7%[3];而2008~2009年康复后的脑卒中患者在1年后的复发率达到了17.1%[4];在高发病率、患病率及复发率的背景下致残率达到了88%[5]。
伴随着脑卒中患者的增加,传统的物理治疗方式已经不能满足病人的需要。传统物理治疗主要由康复医生对患者一对一治疗,时间短、费用高、频次低、康复周期长。而肩部康复机器人具有频次高、大时长且无需占用康复医生的特点,可代替传统物理治疗。
国内外对肩部外骨骼康复机器人的研究日趋完善,控制方式趋于多样性。ARMin系列[6]是第一个实现商业化的康复机器人,能驱动肩部4个自由度(也叫主动控制),但机器人旋转中心做竖直运动,缺失水平方向位移补偿,导致肩部前伸/后缩属于主动运动下肌肉连带运动(也叫被动康复);马里兰大学的MGA机器人[7]能主动控制肩部的3个自由度,考虑了肩胛骨运动对肩部运动的影响,但用机器人肩部旋转中心为圆弧轨迹来替代正常人因肩胛骨内旋、外旋导致的肩部瞬时旋转中心非圆弧轨迹,即瞬时旋转中心人机不重合,存在拉扯感。还有许多类似康复设备,此处不再赘述。
仅从机构设计而言,目前康复机器人都存在肩部自由度主动控制数不足及任意位置的瞬时肩部旋转中心与康复机器人的旋转中心不重合,出现肢体拉扯感而产生不舒适、运动不协调。
针对上述存在的问题,本文利用肩部解剖学结构确定肩部运动自由度;以肩峰为研究对象,确定肩部运动特性;采用二自由度肩胛带机构用以实现肩部上升/下降、前伸/后缩运动,采用三自由度球铰机构实现肩肱关节屈曲/伸展、外展/内收、内旋/外选运动;最后通过完整机械系统进行运动学仿真,确定关节运动空间。
1 肩部解剖学结构与运动特性
针对目前肩部康复机器人在主动康复自由度数不足及人机瞬时旋转中心不吻合问题,可通过分析肩部解剖学结构对复杂的肩部运动进行划分,识别出肩部运动在人体基准面内的运动类型及运动学特性。
1.1 肩部解剖学结构
如图1所示,肩部复合体是由锁骨、胸骨、肩胛骨及肱骨组成,两两形成关节实现肩肱节律行为,如上肢外展180度时,肱骨实际转动120度,肩胛骨内旋运动60度。
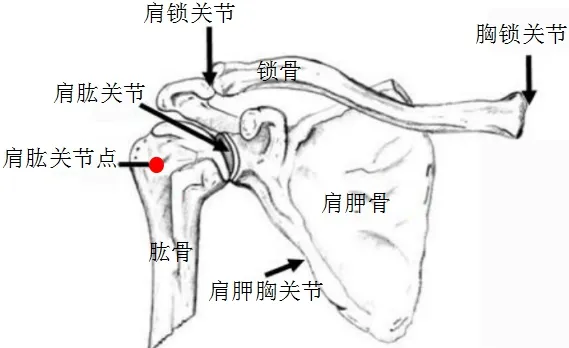
图1 人体肩关节复合体结构[8]
从矢状面、横截面、冠状面出发,如图2所示对运动形式进行分类:以平行于横截面为一类,平行于矢状面为一类,以沿冠状面为一类共分为五个自由度。
HSP60是一种主要存在于线粒体的伴侣蛋白,可抑制细胞凋亡,可通过促进免疫炎症、促进动脉粥样硬化形成参与糖尿病发生[15],并与缺氧诱导因子2α存在蛋白相互作用[16]。本研究显示HSP60在不同血糖状态的结直肠癌样本中的表达无差异,其mRNA表达量随结直肠癌患者年龄增大而增高,可能与其参与多种慢性疾病的病理过程有关。
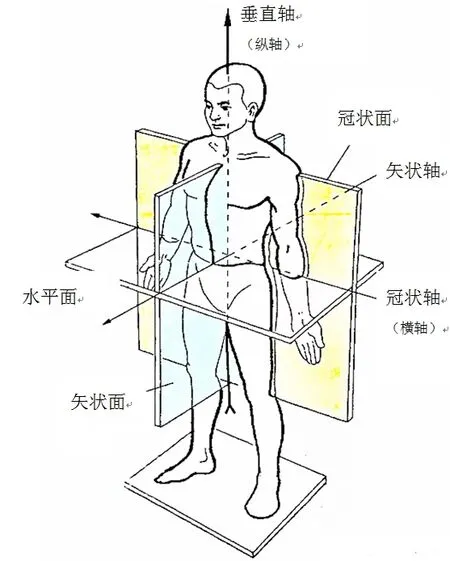
图2 人体解剖基准面
分别为肩部的上升/下降、前伸/后缩;外展/内收、内旋/外旋及屈曲/伸展运动,如图3所示。
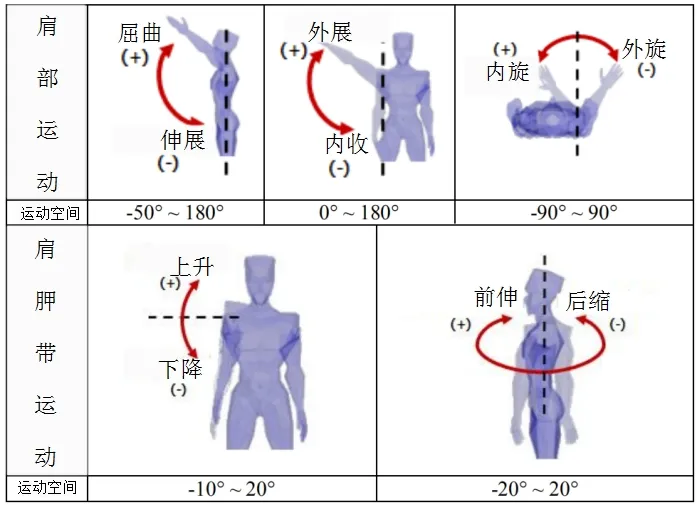
图3 肩部五自由度运动示意图
为研究实际肩部复合体各关节对肩部运动的综合影响,以肩部复合体的局部尖点肩峰为研究对象,肩峰的运动轨迹就是整个肩部复合体综合运动的体现。把肩部复合体节律行为转变为肩峰的轨迹问题,通过控制肩峰的轨迹以实现肩部在节律行为下的运动。
1.2 肩部运动学特性
根据肩部解剖分析,当肩部做前伸/后缩运动时,如图4所示,预期轨迹应以锁骨长AB在横轴方向的投影OB为半径,以胸锁关节中心点A在横轴的投影O为圆心,且平行于水平面做圆弧运动;同理,肩部在做上升/下降运动时应以OB为半径,沿冠状面做圆弧运动。
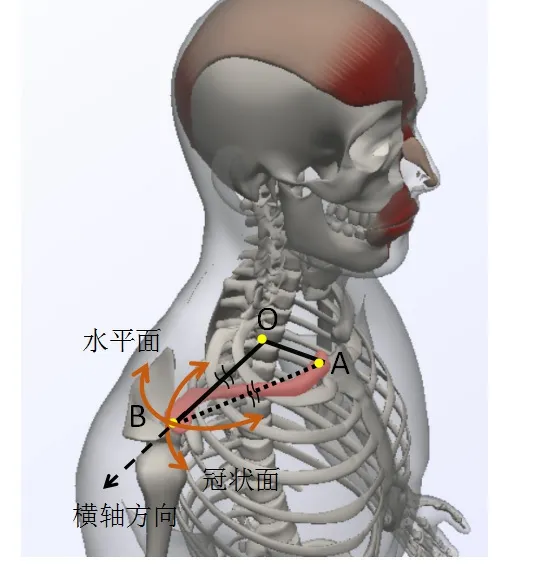
图4 肩关节理论运动面
健康人右肩运动时肩峰的实际运动轨迹如图5所示。实线为肩峰运动轨迹,没有重合是由于试验者重复多次运动时身体出现X横轴方向轻微移动造成的;虚线代表理论轨迹线。
图5(a)红色部分表示健康人肩部上升到极限位置处脊椎呈现扭曲状态,上肢发生侧向偏移。介于虚线及红色线之间表示试验对象脊椎不发生扭曲时所达到的最大极限。由图可得肩部在点{(240,1460),(255,1440)}区间内做类圆弧运动,半径方向偏离胸锁关节点朝向身体内侧,在{(230,1473),(240,1465)}长度内做类直线运动,在X轴方向最大位移为25mm,在Y轴方向位移35mm。
图5(b)表示正常人右肩前伸/后缩时肩峰的运动轨迹(俯视),方框表示当运动到前极限位置时,会出现右肩向左上方偏移,造成曲线在X轴负方向有位移。且肩部前伸/后缩运动轨迹在两极限区间内做变半径运动,轨迹曲率中心偏离胸锁关节点。对应肩峰在X轴方向最大位移为60mm,Z轴方向位移160mm。
从图5可以看出,肩峰在上升/下降及前伸/后缩运动时位移轨迹并不全是接近定半径圆弧曲线,呈变曲率状态。这种轨迹的变化及旋转半径的改变是受到内力的作用:在肩肱节律行为的驱动下,肩部上升/下降运动时肩胛骨在超过一定运动角后受到附着肌肉的作用出现上下偏移;并且当角度进一步扩大,肩胛骨出现一定角度的内外旋转,造成了由类圆弧轨迹转变为类直线轨迹;同理,在肩部前伸/后缩运动时,运动角度扩大时也会发生肩胛骨做一定角度的上下翻转,导致在两极限区间内肩峰轨迹呈现变半径状态。
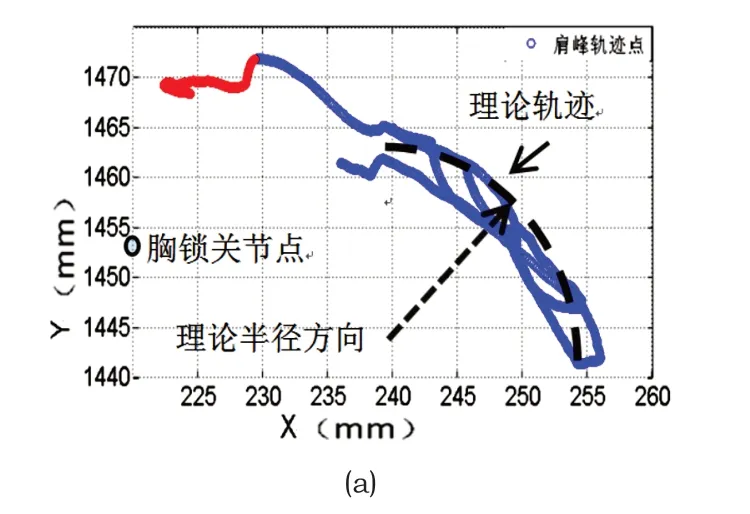
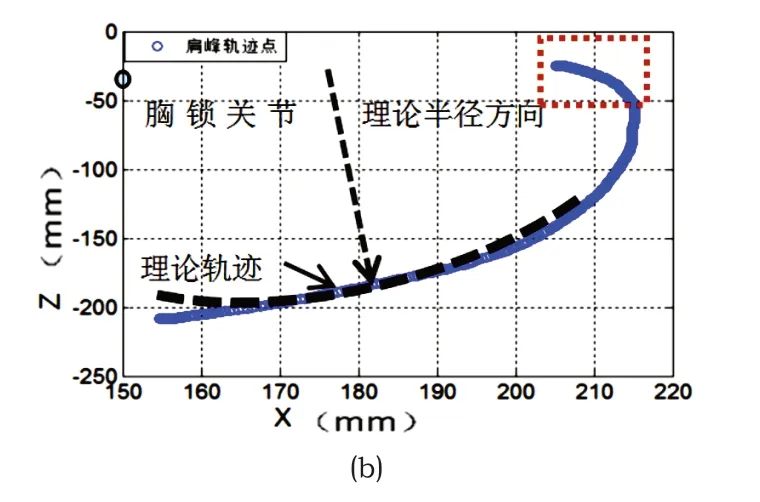
图5 健康人右肩运动时肩峰的运动轨迹
2 外骨骼机器人机构设计
肩部的上升/下降、前伸/后缩运动受到肩肱节律的影响呈现变半径运动状态,迫使肩峰在内力作用下改变运动轨迹。结合肩关节运动空间,使用绕定轴转动的J1关节和平行于冠状面的平行四边形机构J2组成肩胛带机构;对于肩肱关节,用球铰机构J3&J4&J5来代替,以三个独立运转的驱动装置作为肩部三个自由度的驱动源,如图6所示。
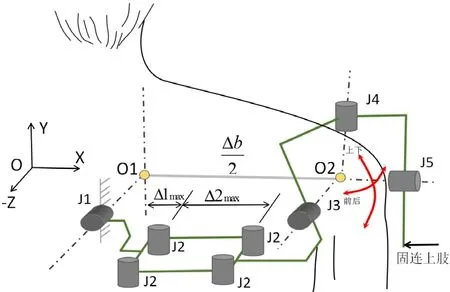
图6 外骨骼机器人运动简图
图6中J代表驱动关节。O1胸锁关节点,O2表示肩肱关节中心,共分为二个部分:J1&J2(肩胛带机构)及J3&-J4&J5(球铰机构)。
2.1 两自由度肩胛带机构设计
外骨骼机器人第一部分为肩胛带机构J1&J2,如图6所示JJ1为主动驱动关节,定轴转动,旋转轴线垂直冠状面穿过胸锁关节点O1。当J1绕轴线旋转时实现肩部的上升/下降运动。
J2为平行四边形机构,如图7所示,杆AB平行于矢状轴,整个机构与冠状面垂直。当角度由Φ变化到θ时实现肩部的前伸/后缩运动。
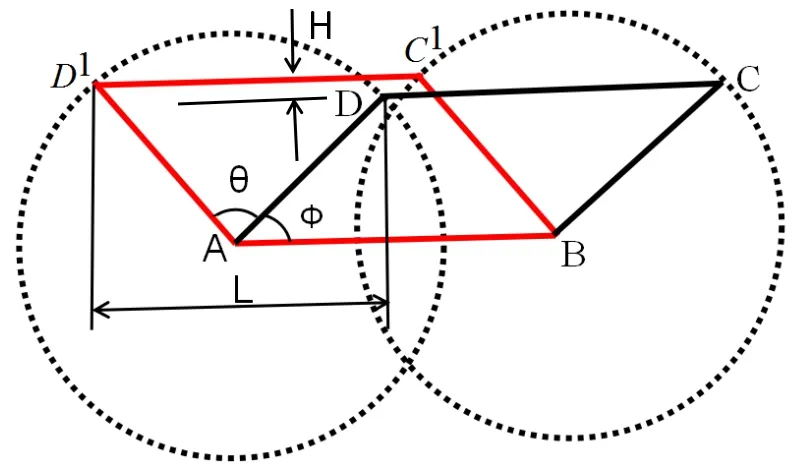
图7 平行四边形机构移动与转角示意图
如图6、图7所示,肩胛带机构的参数关系为:
H表示在X轴方向的移动距离;Δ1max表示J1关节沿X轴方向至J2的最大距离;Δ2max表示J2驱动关节沿X轴方向的最大宽度;LAmax表示包含J1、J2全部宽度之和;Δb表示左右两侧肩肱关节中心之间在X轴方向的距离。Δl表示肩部前伸/后缩时肩峰在平行于纵轴方向的最大运动距离,由试验数据可得。
平行四边形机构在解决运动学差异及刚度上具优势:平行四边形两对边分别平行,当四边形机架固定后,对边连架杆与球铰机构连接后能始终与机架保持一定角度,即康复机器人旋转中心O2与平行四边形机架角度相对固定;较单一转动关节在拟合人、机旋转中心时运动学差异性更小。
2.2 三自由度球铰机构的设计
利用J3&J4&J5球铰机构来实现肩部外展/内收、屈曲/伸展、内旋/外旋动作。根据设计,J3、J4、J5所处的轴线交于一点,如图8所示。结合图6,J3旋转使整个肩肱关节绕J3轴线做旋转运动,实现上肢的外展/内收;J4旋转使上肢实现上肢的外旋/内旋运动;J5旋转实现上肢做屈曲/伸展运动。至此,肩肱关节各自由度通过球铰关节得到了实现。
图8 球铰机构各关节运动示意图
球铰机构为实现最大化满足肩部运动空间,需考虑J3、J4、J5驱动关节的角度布置。为减小变量,结合图6、图8,令J5关节直接与肩部对齐,方向沿-X轴朝于身体内侧。各关节之间位置如图9(a)~图9(d)所示。在保证肩部运动空间各关节对头部、颈部及关节间无干涉的前提下,通过比对选取了α(15度~25度)、β(55度~65度)及γ(55度~65度)值。α、β、γ角度关系如图9(a)、图9(b)、图9(c)所示;坐标系建立如图9(d)所示。
图9 球铰机构关节布置图
球铰机构穿戴与角度配置关系如图10所示,图10(a)为正常穿戴时各关节与人体模型的穿戴关系。箭头方向为各关节的运动方向,参照图8,J3、J4、J5转动时分别对应内收/外展、内/外旋、屈曲/伸直动作;图10(b)表示倾斜放置的J4与J5做屈曲动作时存在间隙;图10(c)表示J3和J5成角度布置避免外旋运动时关节间干涉;由于J4与J3存在角β,使得颈部与J4关节有一定的间隙图10(d)。
图10 三自由度球铰关节连接配置图
3 完整机械系统及仿真分析
图11为采用计算机辅助设计(CAD)的肩部康复机器人双肩三维造型,对其进行运动学分析以确定各关节运动空间,实验条件为各关节做24d/s等角速度运动,运行时间为5s。
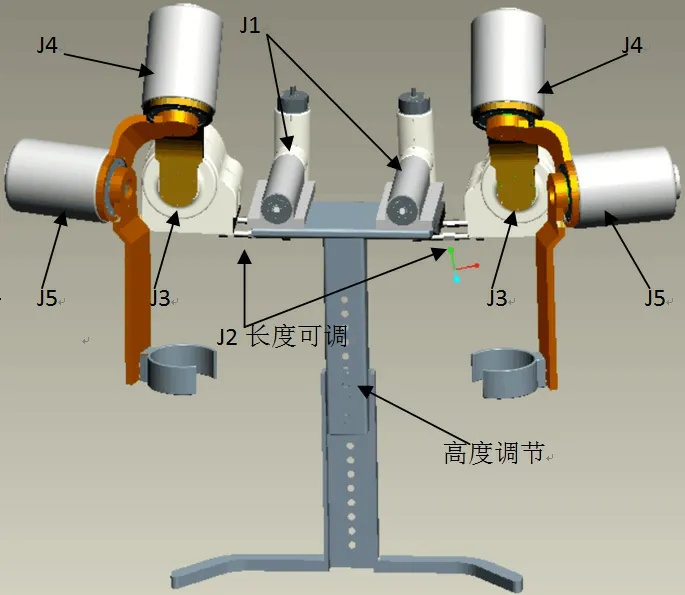
图11 康复机器人三维造型
J1关节转动时球铰中心位移与转角、时间关系如图12所示,实线表示球铰中心位移曲线;运动空间为(-180,180)mm,可达肩部上升/下降全部运动空间。
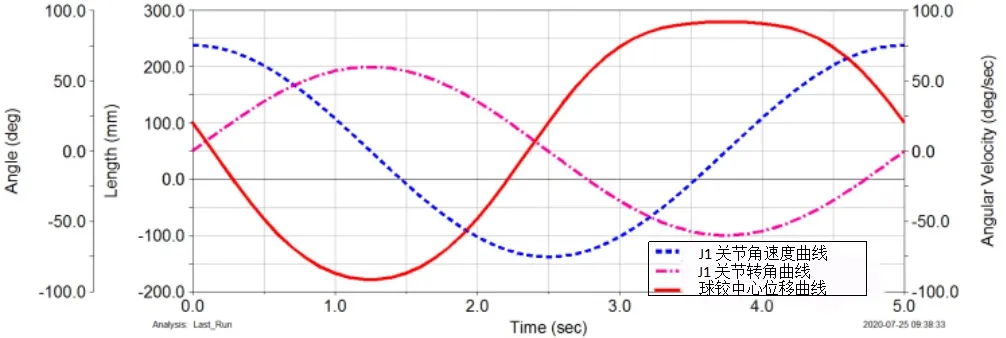
图12 J1关节转角特性曲线
图13为平行四边形机构转动时球铰中心在X轴向与Z轴向位移曲线。虚线框内为满足前伸/后缩运动空间时的有效转角,对应转角42度,此时Z轴向位移运动区间为(50mm,210mm),X轴向位移(-175mm,-75mm),满足图3(b)实际运动参数。
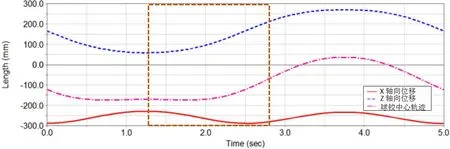
图13 平行四边形机构位移特性曲线
J3转动时肩部外展/内收运动空间如图14所示,虚线表示J3与J2干涉触发曲线;实线表示展角,用以确定干涉发生时外展/内收最大角度。外展最大为100度,内收大于57.5度。
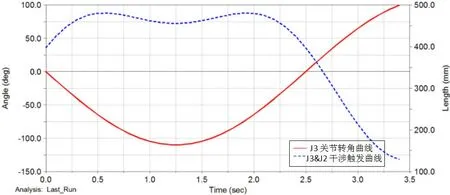
图14 J3关节转动特性曲线
肩部屈曲/伸展、内旋/外旋两自由度在运动时不会发生干涉现象:肩部屈曲动作在体侧平行于矢状面往复摆动,肩部内旋/外旋动作在胸前摆动,固不会受到运动干涉。
结合仿真曲线,可获得球铰机构相对正常人自然运动空间[9]实际转角性能表,如表1所示。
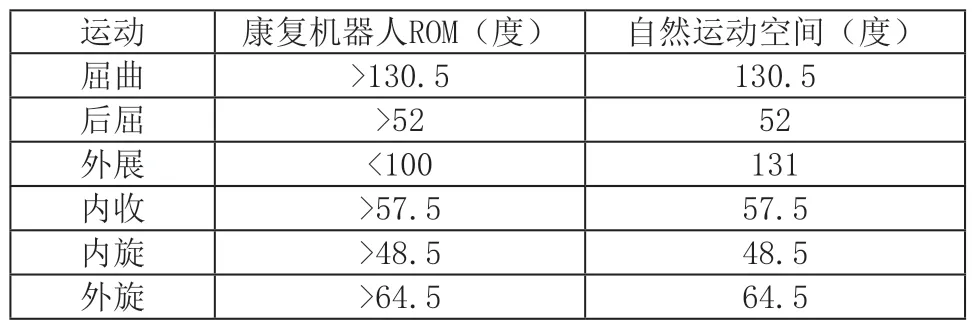
表1 球铰机构运动空间ROM
4 结语
本设计为肩部外骨骼康复机器人对肩部全部自由度康复及机器人与人体肩部瞬时旋转中心的吻合提供了理论设计:基于肩部解剖结构,确定肩部在人体基准面内全部自由度数;并以肩峰为拟合点,对肩峰轨迹进行监测,得出了肩肱节律行为对上肢运动的影响。采用定轴转动关节及平行四边形机构组成肩胛带机构,使得肩部在纵轴及矢状轴方向得到位移补偿,实现肩部上下及前后运动;采用三自由度球铰关节来模拟肱关节在上肢外展/内收、内旋/外旋及屈曲/缩回三自由度运动,并对球铰关节角度配置来最大化满足肩部自然运动空间。令肩胛带机构与球铰关节固连,实现肩部全部自由度主动运动。
后续在样机做出后,通过真人穿戴,总结出各关节的运动速度、协调性控制及不同人群的穿戴尺寸,以便设计出适应性高、协调性好的康复设备,从而更好地服务于脑卒中患者。
猜你喜欢
影像研究与医学应用(2022年16期)2022-09-16
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
临床骨科杂志(2021年4期)2021-08-20
保健与生活(2021年7期)2021-04-19
临床医药文献杂志(电子版)(2020年80期)2021-01-20
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
中华肩肘外科电子杂志(2019年2期)2019-08-08
幸福家庭(2018年2期)2018-02-07
幸福家庭(2017年2期)2017-04-18
