
小型移动式光伏扬水系统的开发
2022-09-02 07:24徐向宇陈锐坚
太阳能 2022年8期
徐向宇,徐 政*,陈锐坚
(1. 清华大学深圳国际研究生院电力系统国家重点实验室深圳研究室,深圳 518055;2. 深圳天源新能源股份有限公司,深圳 518055)
0 引言
光伏扬水技术经历了30多年的发展历程,已产生丰富的系列产品,光伏扬水系统单台水泵的额定功率可从数十瓦到数百千瓦,既有解决偏远无电地区家庭或村落生活用水问题的小型光伏扬水、淡化与净化系统,也有面向农林牧业灌溉、荒漠治理等的大型光伏水利系统[1-5],相关的产品和系统方案主要由丹麦的格兰富公司和丹佛斯公司、德国的劳伦斯公司、印度的塔塔公司,以及中国多家变频器和水泵厂商提供。
光伏扬水系统主要由光伏阵列、水泵、控制器及其他配套设备构成,通常采用固定安装的方式,就近取水与利用。在早期的推广应用中,由于光伏扬水系统的初始投资成本高,其应用通常以政府财政补贴、集体资金投入、公共设施建设为主,难以吸引个体消费者。近年来,随着光伏组件价格大幅下降,光伏扬水系统成本显著降低,其市场规模也不断增大,已在全球100多个国家和地区得到推广应用,并以东南亚和非洲市场为主,小型光伏扬水系统也开始向个体消费者市场渗透。
在中国西部偏远地区,小型光伏扬水系统主要用于解决生活用水和牲畜饮水等问题。由于西部偏远地区地广人疏、居住分散甚至不固定,水源与取水条件多变,多年前就有研究人员发现了移动式光伏扬水系统的市场需求并提出了设计构思[6-7]。笔者团队基于长期光伏扬水技术研究所积累的经验和成果[8-9],开发了以电动三轮车为移动载体的小型移动式光伏扬水系统,并制作了样机,实现了多功能兼容、低压安全、适应性强、操作简便等设计目标。本文主要介绍了小型移动式光伏扬水系统的整体设计方案,包括结构设计、设备配置和充放电与逆变控制器(下文简称为“控制器”)开发,并通过实验确认小型移动式光伏扬水系统的运行特性,验证了设计方案的可行性。
1 小型移动式光伏扬水系统的设计
1.1 结构设计
小型移动式光伏扬水系统的结构设计取决于移动载体的选择,首先需要确定移动方式是自动式还是拖动式。考虑到扬水系统的自重和实际路况等因素,若采用人力或其他动力的拖动式,现场操作难度大;而自动式的移动载体的选择需要综合考虑消费者的经济承受能力、驾驶操控能力、移动载体与光伏扬水设备的结合度,以及多功能兼容性。基于此,本光伏扬水系统选择电动三轮车作为移动载体。电动三轮车具有以下优势:
1)结构紧凑,便于进行安装光伏组件的改造,而且运行灵活、操控简单。
2)标配的蓄电池与光伏发电相辅相成,光伏组件可向蓄电池组充电,提供电动三轮车行驶的动力;而蓄电池组又能辅助光伏组件向扬水设备提供稳定的电能。
3)价格较低,用途广泛,载上光伏扬水设备后能够灵活地到水源地取水,卸下扬水设备后则变身为光伏电动三轮车,可用于短途交通与运输。
本设计方案选择了一款动力和尺寸均较大的电动三轮车,整车的长、宽、高分别为3200 mm、1200 mm、1350 mm,翻斗式车厢的长、宽分别为1800 mm、1200 mm,驱动电机额定功率为1200 W,标准配置72V/35.5Ah胶体铅酸电池,最高可配置72V/45Ah胶体铅酸电池。
根据所选电动三轮车的外形尺寸,小型移动式光伏扬水系统的结构设计方案为:选用4块规格相同的光伏组件;用40 mm×40 mm的角铝制成固定在车厢上的框架(批量生产时向三轮车厂商定制专用的车厢);先在框架顶部水平固定2块光伏组件,离地高度为1800 mm,总长与整车基本保持一致,宽度不超过车宽;再在车厢两侧各安装1块活动的光伏组件,利用合页将光伏组件上边框固定在框架上,在电动三轮车行驶时垂下,用弹簧锁扣将光伏组件下边框固定在框架上。小型移动式光伏扬水系统行驶时的外观如图1a所示。该系统充电和扬水时,将两侧的光伏组件打开,用斜杆支撑固定,还可通过调节车身朝向和车厢倾角,使光伏组件对准太阳,提高光伏阵列输出功率。小型移动式光伏扬水系统扬水和充电时的外观如图1b所示。

图1 不同状态下小型移动式光伏扬水系统的外观Fig. 1 Appearance of small-scale mobile PV pumping system under different conditions
对于扬水设备,其控制箱固定在车厢上,而电缆盘、水管车、水泵放在车厢内,用弹簧锁扣固定。
1.2 设备配置
小型移动式光伏扬水系统的运行功率上限取决于电动三轮车的外形尺寸与蓄电池组的容量。该光伏扬水系统设计方案的设备选型具体为:
1)光伏阵列:由4块250WP/30V的多晶硅光伏组件组成;单块光伏组件的尺寸为1640 mm×990 mm,重量为23 kg;光伏阵列总标称峰值功率为1000 WP。为保证电气安全,光伏阵列采用“2串2并”的接线方式,开路电压为74 V,最大功率点(maximum power point tracking,MPPT)电压为60 V。
2)蓄电池组:由6个12V/35.5Ah的胶体铅酸电池串联而成,正常工作电压范围为63~84 V。虽然胶体铅酸电池的重量能量比、体积能量比及充/放电循环次数不如锂电池的,但其使用环境温度范围宽、价格低、安全性高、维护方便。
3)水泵:由于水源与取水点不确定,要求水泵扬程范围宽、电机效率高、扬水效率稳定,而受光伏阵列和蓄电池组容量的限制,水泵的最大运行功率应控制在1 kW以内。因此,选用由高效直流无刷电机驱动的潜水螺杆泵,额定功率为600 W,额定电压为48 V,额定转速为3000 rpm,额定流量为1.8 m3/h,最高扬程为138 m;全长为560 mm,外径为100 mm,出水口径为32 mm,重量为7.9 kg,轻巧灵便。
4)电缆盘:考虑到从深井或从电动三轮车无法靠近的河湖中取水时,需要有长电缆连接控制器与水泵,再加上水泵的运行电压低、电流大,为了减小电缆压降,选用横截面为4 mm2的三芯电缆;电缆全长为60 m,分2个电缆盘,实际距离较短时用1个电缆盘,否则就将2个电缆盘串联使用。
5)水管车:为了保证足够的扬水高度和距离,配置1台水管车,采用全长为50 m、管径为25 mm的柔性水管。
6)水桶:若取水处与用水处相隔较远,可先将水灌入水桶,然后运至用水处,该光伏扬水系统共配8个25 L的塑料水桶。
1.3 充放电与逆变控制器开发
小型移动式光伏扬水系统的电气与控制电路框图如图2所示。图中底部的充电器、蓄电池组、驱动器及电机均为电动三轮车原有的配置;虚框包围的部分则为本小型移动式光伏扬水系统的控制器,由控制电路、电源电路、光伏控制电路及水泵驱动电路组成;蓄电池组支撑的直流母线为公共连接点。图中:Udc为直流母线电压;UPV为光伏阵列输出电压;Uac为控制器逆变输出电压。
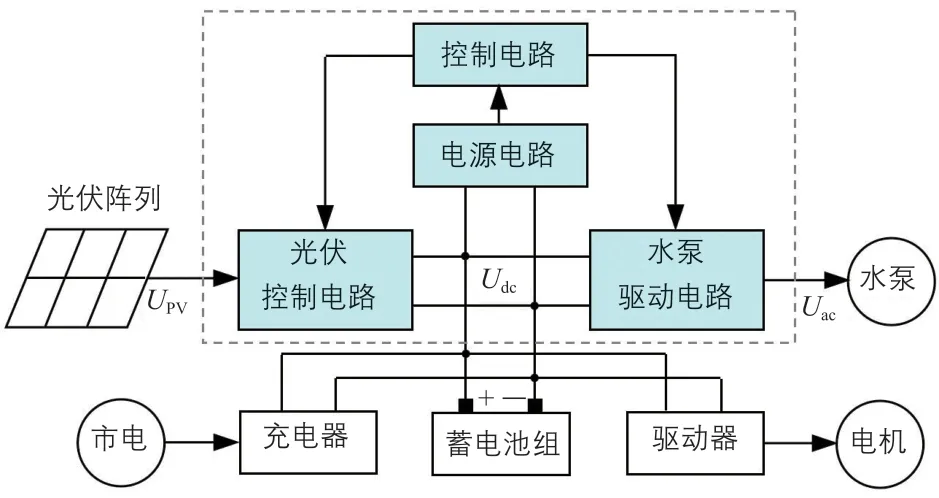
图2 小型移动式光伏扬水系统的电气与控制电路框图Fig. 2 Block diagram of electrical and control circuit of small-scale mobile PV pumping system
电源电路从蓄电池组取电,采用单端反激式电路拓扑,为控制电路提供所需的3路工作电源,分别为5 V、5 V和15 V;控制电路以美国Cypress公司生产的Arm架构32位控制芯片CY8C4146为核心,根据相应的算法对光伏控制电路和水泵驱动电路实施脉冲宽度调制(pulse width modulation,PWM),开关器件均为功率场效应管;光伏控制电路采用Boost电路拓扑,开关频率为16 kHz,可实现光伏发电对蓄电池组的智能充电控制[10];水泵驱动电路采用三相全桥逆变电路拓扑,开关频率为8 kHz,可实现对水泵的变频调速控制。
控制器的实物图如图3所示,其与主要配套设备在车厢内的固定摆放布局的实物图如图4所示。
1.4 控制策略
小型移动式光伏扬水系统有充电、行驶和扬水3种运行状态,而光伏发电和扬水逆变的控制均基于蓄电池组的荷电状态,保持相对独立,因此只需分别设计光伏发电和扬水逆变的控制策略。

图3 控制器的实物图Fig. 3 Photo of controller

图4 控制器与主要配套设备在车厢内的固定摆放布局实物图Fig. 4 Photo of fixed layout of controller and main supporting equipment in carriage
1.4.1 光伏发电控制策略
1)根据蓄电池组的最高工作电压Umax(对应满荷电状态),设定光伏发电控制的直流母线电压的上限阈值U1约等于蓄电池组的最高工作电压,当直流母线电压小于光伏发电控制的直流母线电压的上限阈值时,意味着光伏阵列输出功率能够全部被消纳。实施MPPT控制,采用经典的扰动观察法,以光伏阵列输出电压为扰动变量,扰动步长ΔU为0.2 V。根据光伏阵列输出功率PPV的变化,在每个MPPT控制周期(20 ms)更新光伏阵列输出电压的目标值UPV-ref。
光伏阵列输出电压的目标值可表示为:

式中:n为第n个MPPT控制周期。
其中:

2)调节Boost电路的导通占空比D,使光伏阵列输出电压跟随光伏阵列输出电压的目标值,再检测对应的光伏阵列输出功率。由于直流母线电压的大小随蓄电池组荷电状态、行驶驱动功率及扬水功率而大幅变化,因此本文根据Boost电路升压比与导通占空比的关系,采用以直流母线电压为前馈的控制。
Boost电路的导通占空比可表示为:

Boost电路调压控制的抗扰动能力强,且无需优化整定控制器参数。
当直流母线电压大于等于光伏发电控制的直流母线电压的上限阈值时,表明蓄电池组已接近充满,而光伏阵列输出功率过剩,因此保持ΔU(n)=0.2 V不变,再通过式(1)和式(3)调节光伏阵列输出电压的目标值和Boost电路的导通占空比,逐渐降低光伏阵列输出功率,实现直流母线电压的恒压控制。
1.4.2 扬水逆变控制策略
对水泵的直流无刷电机实施变压逆变调速控制。根据蓄电池组的最低工作电压Umin(对应亏电状态),设定扬水逆变控制的直流母线电压的下限阈值U2大于蓄电池的最低工作电压。
当直流母线电压大于扬水逆变控制的直流母线电压的下限阈值时,通过调节控制器逆变输出电压控制水泵满功率运行(高扬程)或全速运行(低扬程);当直流母线电压小于等于扬水逆变控制的直流母线电压的下限阈值时,通过减小控制器逆变输出电压来降低水泵运行转速和功率,直至水泵停止运行。
由于扬水逆变控制的直流母线电压下限阈值的设定保留了相应的裕度,从而保证蓄电池组合理保存电动三轮车继续行驶所需的电能。
2 本光伏扬水系统运行实验
2.1 行驶性能测试
小型移动式光伏扬水系统首先必须具备良好的机动特性,电动三轮车操控简单,在行驶过程中有2种供电模式,一种是蓄电池组单独供电模式,另一种是光伏发电与蓄电池组同时供电模式。实测行驶过程中小型移动式光伏扬水系统的电气特性如图5所示。图中:I为电动三轮车行驶时的驱动电流;t为时间;L为电动三轮车的行驶里程;Ubat为蓄电池组的空载电压。

图5 小型移动式光伏扬水系统行驶过程中实测的电气特性Fig. 5 Measured electrical characteristics of small-scale mobile PV pumping system during driving
蓄电池组单独供电时的直流母线电压和电动三轮车行驶时的驱动电流的波形如图5a所示。从图中可以看出:打开电源后,蓄电池组单独供电时实测直流母线电压和电动三轮车行驶时的驱动电流分别为77 V和0 A;将电动三轮车的加速转把拧到底,开始加速行驶,直流母线电压逐渐降至69 V,驱动电流先升至50~60 A,然后逐渐回落至35~40 A,车速稳定在32 km/h;松开电动三轮车的加速转把减速滑行时,驱动电流迅速降至0 A,直流母线电压回升至76 V;反复加速、减速操控的实测结果显示,加速时驱动电流均经历相似的变化过程,加速驱动功率高达4~5 kW,保持32 km/h匀速行驶时的驱动功率约为2.5 kW。
蓄电池组充满电后的续航里程决定了小型移动式光伏扬水系统的活动范围。在平坦的铺装路上保持约30 km/h的车速持续行驶,蓄电池组的初始空载电压为80.7 V,随着行驶里程的增加,蓄电池组的空载电压不断降低,直至降到其最低工作电压(63 V),如图5b所示。从图中还可以看出:蓄电池组单独供电时续航里程约为43 km,而晴天条件下顶部500 WP光伏组件与蓄电池组同时供电时的续航里程可增至约60 km。
2.2 水泵性能测试
在水泵测试平台上对所选潜水螺杆泵的运行特性进行全面测试,其以最高转速3600 rpm和额定转速3000 rpm运行时的实测结果分别如图6所示。图中:H为水泵全扬程;P为水泵功率;Q为水泵流量。
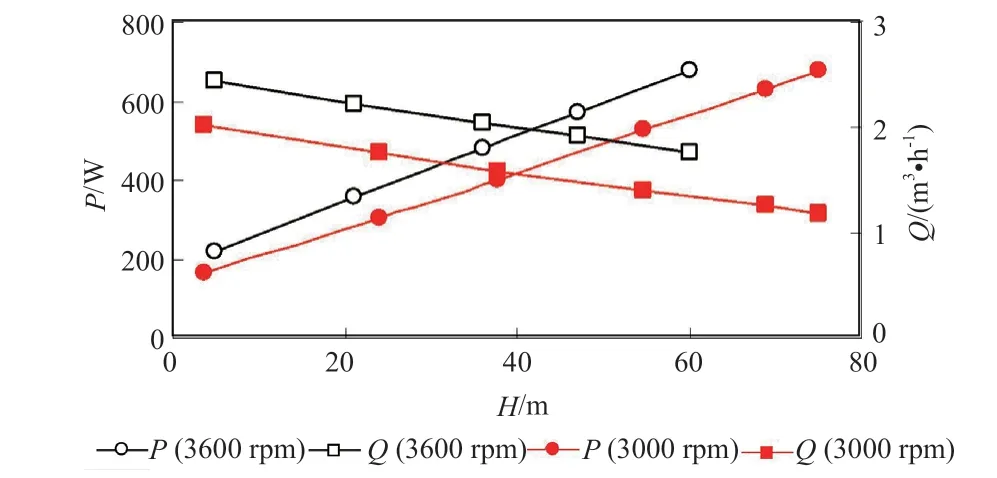
图6 不同转速下水泵的运行特性Fig. 6 Operating characteristics of water pump at different speeds
从图6可以看出:随着水泵扬程的增高,水泵功率呈线性增大,水泵流量呈线性减小。当转速为3600 rpm、扬程为60 m时,水泵功率为680 W,水泵流量为1.76 m3/h,对应水泵满功率运行状态,扬水效率高达42.3%。由于在实际应用中的最高扬程通常低于50 m,因此水泵以全速(即3300 rpm)运行为主,仅当光伏阵列输出功率和蓄电池组荷电不足时才会减速运行。
2.3 光伏发电特性测试
小型移动式光伏扬水系统有3种系统运行模式,分别为:充电模式、行驶模式、扬水模式,下文对不同运行模式下的光伏发电特性进行测试。
2.3.1 充电模式
充电模式时,小型移动式光伏扬水系统停驶,水泵停运,由光伏组件向蓄电池组充电,根据蓄电池组的荷电状态实施MPPT控制或恒压控制。为了避免因达到光伏发电控制的直流母线电压上限阈值而降低光伏阵列输出功率以保持直流母线电压的恒压运行状态,选用顶部2块光伏组件展示充电控制特性,充电模式下的光伏发电特性如图7所示。图中:IPV为光伏阵列的输出电流。

图7 充电模式下的光伏发电特性Fig. 7 PV power generation characteristics in charging mode
从图7可以看出:充电模式下,顶部500 WP光伏阵列的输出电压与输出电流实测波形较为平稳,即光伏阵列运行状态较为稳定,光伏阵列输出电压波形在最大功率点(MPP)电压上下呈“三点振荡”状态,光伏阵列输出电流波形的变化方向与输出电压波形的变化方向相反,MPPT精度大于99%,控制器转换效率约为96%。
为展示小型移动式光伏扬水系统的最大充电能力,选用全部4块光伏组件进行全天充电模式时的光伏发电特性测试。晴天条件下全天充电模式时的光伏发电特性实测结果如图8所示,图中:Eh为太阳辐照度。
蓄电池组的端口电压始终与直流母线电压保持一致。从图8可以看出:蓄电池组初始电压为67 V,处于亏电状态;从09:00起用1000 WP光伏阵列进行充电,上午处于MPPT控制模式,光伏阵列输出功率随太阳辐照度的变化而变化,直流母线电压逐渐上升;从13:00起,直流母线电压达到设定的阈值87 V,进入恒压充电模式,光伏阵列输出功率逐渐减小,从亏电到充满状态约需7 h。

图8 晴天条件下全天充电模式时的光伏发电特性Fig. 8 PV power generation characteristics in all day charging mode under sunny condition
2.3.2 行驶模式
行驶模式时,水泵停运,小型移动式光伏扬水系统移动,为了行驶安全,两侧光伏组件不打开,仅用顶部的2块(500 WP)光伏组件辅助供电。晴天条件下行驶模式时光伏发电特性如图9所示。
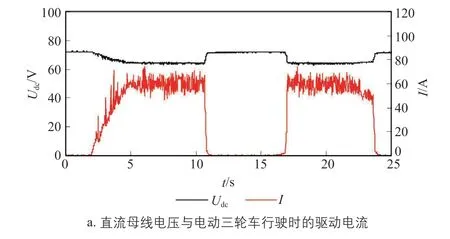
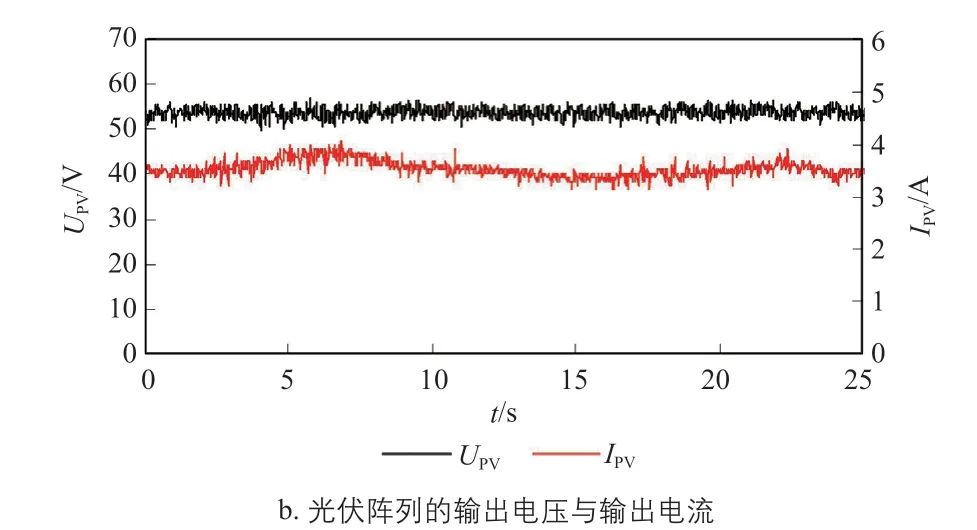
图9 晴天条件下行驶模式时的光伏发电特性Fig. 9 PV power generation characteristics in driving mode under sunny condition
从图9可以看出:晴天条件下行驶模式时,在驱动功率扰动下,尽管直流母线电压随电动三轮车行驶时的驱动电流的变化而跃变,但光伏阵列输出电压始终保持稳定,光伏阵列输出电流则略有波动。
电动三轮车行驶过程中,太阳光会被周围建筑和树木短时遮挡,此时的光伏发电特性如图10所示。

图10 光照扰动下的光伏发电特性Fig. 10 PV power generation characteristics under irradiation disturbance
从图10可以看出:随着太阳光的短时变化,虽然太阳辐照度存在跃变,但MPPT控制能够迅速响应,因此光伏阵列输出电压基本保持稳定,而光伏阵列输出电流则存在大幅变化。
2.3.3 扬水模式
扬水模式时,电动三轮车停驶,水泵运行,由4块光伏组件和蓄电池组同时向水泵供电。净扬程h为25 m,水管全长为50 m,水泵始终全速(3300 rpm)运行,晴间多云条件下扬水模式时全天光伏发电特性如图11所示。水泵驱动电路输入功率Ppum稳定在480 W左右,流量计测量得到水泵流量为1.96 m3/h,基本符合图6的水泵测试结果。由于水管中的摩擦水头损失和出水口的速度水头损失,全扬程远大于净扬程,再加上长电缆(60 m)的损耗,所测得的水泵驱动电路输入功率与水泵性能测试结果(约为360 W)相比明显增大。
若定义小型移动式光伏扬水系统的扬水效率η为单位时间内流体势能的增量与水泵驱动电路输入功率之比,即其可表示为:

式中:ρ为流体的密度;g为重力加速度。
根据式(4),可得到上述运行状态所对应的小型移动式光伏扬水系统扬水效率为27.8%。
当光伏阵列输出功率大于水泵驱动电路输入功率时,向蓄电池组充电;反之,则蓄电池组放电。水泵全天运行8 h,扬水量为15.7 m3,光伏发电量与水泵耗电量基本持平,扬水运行结束时蓄电池组仍保持高荷电状态。
3 结论
本文从结构设计、设备配置和充放电与逆变控制器开发3个方面介绍了自主设计开发的小型移动式光伏扬水系统的整体设计方案,并通过实验确认了小型移动式光伏扬水系统的运行特性,验证了设计方案的可行性。
1)以电动三轮车为载体的小型移动式光伏扬水系统的结构紧凑、移动灵活、操控简单,配套的1000 WP光伏阵列基本满足扬水系统的用电需求,光伏发电向蓄电池组充电约6~7 h,就能使蓄电池组从亏电状态转为充满状态。
2)设计方案中的充放电与逆变控制器实现了光伏发电、蓄电池组充放电及水泵运行的全自动、智能化控制,MPPT精度大于99%,且采用低压直流电配置,小型移动式光伏扬水系统的安全性高。
3)水泵选用直流无刷电机驱动的潜水螺杆泵,最大运行功率约为600 W,扬水效率可达40%。小型移动式光伏扬水系统适应5~50 m的净扬程范围,与之对应的晴天条件下的日扬水量约为18~12 m3。
4)光伏发电和蓄电池组同时供电使小型移动式光伏扬水系统的续航里程可达60 km,也适用于日常的短途交通和运输,大幅提高了系统投资性价比。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
电气技术(2022年5期)2022-05-23
宁夏电力(2022年1期)2022-04-29
商用汽车(2021年4期)2021-10-13
科技信息·学术版(2021年7期)2021-01-10
冰雪运动(2019年3期)2019-08-23
智能计算机与应用(2019年1期)2019-01-11
课程教育研究·学法教法研究(2018年20期)2018-08-11
山东工业技术(2017年16期)2017-09-05
科技创新与应用(2017年5期)2017-03-16
