
基于滑模观测器的煤矿永磁同步电机的控制系统设计
2022-09-01 07:07:26张传俊
大众标准化 2022年16期
侯 玫,张传俊
(1.淮河能源控股集团有限责任公司煤业公司安装工程分公司,安徽 淮南 232000;2.安徽工商职业学院,安徽 合肥 230000)
矿用电机车是我国矿山机械主要运输方式,蓄电池充电通常在井下电机车库进行,蓄电池电机车存在电池寿命短、加酸加液泄露等缺点,超级电容器具有充电时间长,使用温度范围宽等特点,使新型电机车具有充电速度快等优点,可以解决铅蓄电池电机使用安全隐患。矿用电机车对驱动电机性能要求较高,交流电机不需应用电刷,消除换向火花引发瓦斯爆炸的隐患,减少检修电刷的工作量,交流调速系统技术日益成熟,实现在矿用电机车上的应用。永磁同步电机出现推动永磁材料发展,永磁同步电机运行性能平稳,采用永磁同步电机为矿用电机车控制系统牵引电机,可以减少电机维护工作量。
1 煤矿永磁同步电机控制技术研究
电机节能是国家节能减排工作的重点领域,采用交流电机成为调速牵引系统的必然趋势,异步电机成为交流调速的主流电机,80年代初第三代稀土永磁材料问世推动永磁同步电机的发展,永磁材料发展使得电机本体性能得到提高,永磁同步电机不需无功励磁电流,具有高功率密度,可维护性好等优点。同步电机不能自行启动成为其推广的障碍,随着电力电子技术的发展,矢量控制问世使得交流调速系统性能得到提升,解决起步困难问题。
目前矿用电机车每台配备3套铅酸电池组,铅酸蓄电池能量密度低,导致电机车用电效率低,充电设备初期建设投资较大,导致在市场上推广受到制约。由于超级电容器制造工艺特殊性,其等效内阻低,超级电容比功率可达到10 000 W/k,超级电容具有很高的应用性能。矿用牵引机车工作环境恶劣,超级电容具有环保寿命长等优点。超电容电源装置可进行短时大电流充放电,超级电容器问世于七八十年代,未来具有良好的发展趋势。矿用电机车中永磁同步电机应用最多,异步电动机控制系统应用中存在低速性能不稳定等问题,参数变化会对系统造成影响。永磁同步电机诞生于1831年,近年来借助永磁材料发展控制技术日益成熟,永磁同步电机性能得到提升。
牵引电机是电机车核心部件,异步电机得到广泛推广应用。采用永磁材料同步电机优于异步电机,因其优越物理特性,加快永磁同步电机技术的发展。永磁同步电机作为矿用电机车驱动电机具有多种优势。近年来永磁同步电机矢量控制技术快速发展,永磁同步电机转子磁链为定值,矢量控制系统中准确检测转子角度实时信息是实现电机性能提高的前提。由于无传感器控制技术的成熟,永磁同步电机矢量控制系统广泛应用于航空航天设备等方面,有效提高系统控制精度与稳定性。无传感器控制技术诞生开拓新技术领域,可以提高控制系统稳定的可靠性,推动永磁同步电机在各行业的应用。
2 矿用电机车永磁同步电机控制原理
近年来,高速永磁同步电机在现代工业生产中得到广泛应用,但机械传感器带来成本增加,滑膜观测器凭借其物理实现简单等优点备受关注,滑膜观测器结果易受到抖振干扰。无位置传感器控制法成为当前热点,主要包括高频注入,滑膜观测器等。交流电机分为同异步电机、异步电动机具有造价低等优点,但存在启动转矩小等缺点。永磁同步电机矢量控制系统成为重要的研究方向。
永磁同步电机根据转子永磁体位置分为表面式与内嵌式,内嵌式永磁同步电机转子磁路不对称,转子磁路结构不对称性产生磁阻转矩有助于提高过载能力。内嵌式永磁同步电机结构与传统感应电机类似,将永磁体取代电励磁绕组安装在转子上。转子永磁体磁场与定子电流产生磁场相互作用,磁场关系变得非常复杂,建立电机数学模型非常困难。通常假设转子无阻尼绕组,电机反电动势在空间呈正弦分布。将三相静止坐标系下永磁同步电机数学模型变换到两相旋转坐标系,坐标系合成磁势在坐标轴投影效果相同,可得到三相静止坐标系变换公式。电机调速控制关键是实现转矩控制,矢量控制是将电机转矩转换为不耦合轴定子电流控制,存在d,p轴电流多种组合方式。
矢量控制核心是解耦控制,矢量控制采用转子磁场定向控制策略,将三相电流矢量分解为相互垂直的励磁电流矢量id、q轴建立在超前转子磁通90°位置处,实时检测转子磁通位置可实现磁场定向控制。Id=0控制方法简单,使得电机调速容易实现,id=0控制方法使永磁同步电机拥有相同于直流电机控制特性。电磁转矩与iq成正比关系,在额定电流内可输出较大转矩。空间矢量脉宽调制是将定子电压合成为旋转电压矢量,可用三相逆变器输出任意相邻基本电压矢量表示定子电压转合为矢量状态,调整矢量作用时间可提高旋转磁场接近圆形程度。
3 滑膜观测器PMSM控制系统
高性能永磁同步电机矢量控制要准确进行闭环控制,传感器设备获得反馈卡信号,增加机械连接与电气连接,无传感器永磁同步电机矢量控制具有广阔前景。永磁同步无传感器控制法包括基于高频信号注入与基于电机反电动势法,高频电流注入方法需要对电流调节器进行特殊设计,通过对IPMSM在转子参考坐标系基本电压方程合理分析,对高频信号注入法可行性验证。
电流环是永磁同步电机矢量控制系统的内环,永磁同步电机矢量控制将定子电流控制分解为励磁分量id与转矩分量iq,点亮转换到同步旋转坐标系产生交叉耦合,电流调节器性能随着转速下降,降低交流环的控制性能。电压前馈解耦等多种方法改善电流调节器耦合性能。耦合方案大多对电机参数依赖性强,改善电流耦合性能有限。复矢量电流调节器通过控制器不对称复零点对消控系统不对称复极点,改善电流动态耦合现象。数字实现通过将连续s域转换到离散z域近似法离散化,在大多数场合下适用,采用直接设计法设计离散电流调节器可表现优越性能。
滑模变结构是变结构控制策略,具有对对象数学模型精度要求低,控制算法简单等优点,滑膜变结构可迫使系统沿规定状态轨迹作运动。滑模变结构控制在50年代出现,形成具有鲁棒性好的控制系统。变结构自动控制系统是表现为控制不连续性非线性系统,滑膜控制条件包括稳定性等。滑模控制系统运动分为滑模面内外运动,设计滑模变结构控制器步骤包括设计切换函数s(x),u(x),滑模观测器是驱使状态变量轨线沿滑模面移动,估算电流误差值中含有反电动势估算信息,通过反电动势公式得到位置角度估算值。结合锁相环估算转正位置,锁相环模块通过反电动势与转子位置关系,对转子速度积分得到位置信息。
4 改进型滑模观测器PMSM控制系统
永磁同步电机调速系统位置传感器实现速度闭环控制,利用传感器确定转子磁极位置,产生所需电磁转矩精确控制电机。采用光电筹码器等机械位置传感器降低系统可靠性,滑模观测器通过分析电机数学模型修正估算值偏差估算转子位置。电机方程往往忽略电机凸极性能。利用李亚普若夫稳定准则进行位置估算,通过建立电机数学模型估算转子速度。
卡尔曼滤波器对估算误差有很好的消除作用,要利用低通滤波器对PWM形式反电动势进行滤波,滑模运动中产生抖振稳态,由于原先系统采用开关切换函数sign(x)估算反电动势,状态变量进行高速滑模切换产生高频率抖动,采用饱和函数代替控制函数继电特性,传统卡尔曼滤波器中增益K1为固定值,K1取值过大引起系统出现振荡。采用调速中系统在调速范围内获得更加良好的稳定性。采用MATLAB7.1系统仿真,经电流观测器得出所需反电动势,滑模电流观测器将可测输入量转变为反电动势输出。
在永磁同步电机矢量控制方案基础上修改,得到永磁同步电机无传感器矢量控制结构,建立永磁同步电机矢量控制仿真模型。经磁链/电流观测器,改进反电动势观测器得出转子位置速度。电流观测器将可测电压作为输入量,改进反电动势观测器将磁链得到电流估算值传入模块。经电流观测器估算后反电动势Ea波形不存在小波纹,根据永磁同步电机转矩响应曲线,转矩达到稳定值电机稳定运行。分析转子位置实际值与估算值曲线,滑模观测器可对角度进行估算。
5 永磁同步电机控制系统实现
永磁同步电机具有重量轻等优点逐渐受到交流伺服系统设计者的青睐,一些精密系统中对伺服系统要求更高性能,用户希望在原有系统集成更多。实验选用TI公司生产数字信号处理器TMS320F2812,设计部分包括软件环境与设计流程,硬件设计驱动电路等。永磁同步电机控制系统硬件结构从整体设计,根据小模块功能进行硬件设计,使系统获得良好抗干扰能力。
控制系统硬件电路分为主电路与控制电路部分,主电路部分包括整流滤波环节,控制部分包括直流电压检测模块等。系统控制将220 v交流电压输入整流滤波器输出直流电压,系统出现过压信号保护电路使DSP进入保护中断。主电路上电对直流侧大电容充电产生瞬时电流,上电启动继电器未关闭,限制电路启动电流,继电器吸合切除启动电阻。电流检测模块检测电机过载产生电流,设计分为对直流母线电压与电机三相电流检测。将检测直流母线电压接入控制板,电压信号输入由运放LM358组成光耦隔离电路,通过运放LM324后接入DSP的AD采用通道。图1为动态变速时转子实际速度与估算转速波形。

图1 动态变速时转子实际速度与估算转速波形
为使永磁同步电机控制系统正常运行,设计合理的硬件电路基础上完成软件编程。主程序对需要中断矢量进行声明,中断服务程序包含控制中断服务子程序。系统通过检测出电机定子电流估算转子位置,检测转子初始位置角,打开DSP中断等待信号进入中断程序。中断服务程序完成控制系统主要功能,电机控制中断程序利用定时器为中断源,CPU响应中断执行系列程序对永磁同步电机控制。动态加载时转子实际转速和估算转速波形见图2。
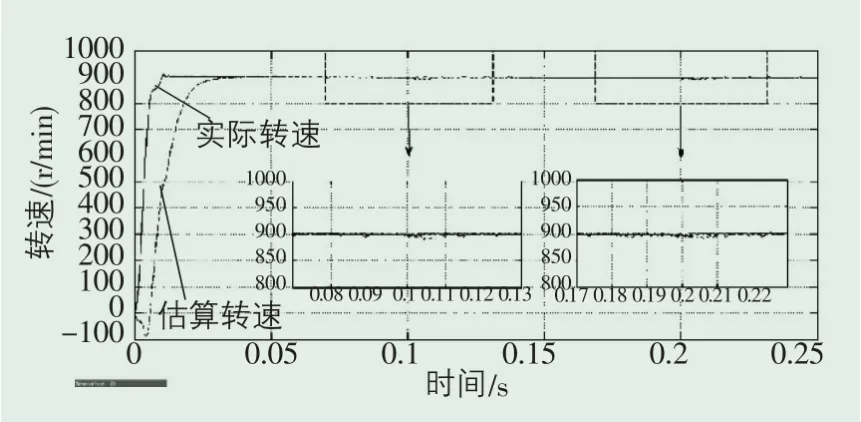
图2 动态加载时转子实际转速和估算转速波形
编码器产生齿脉冲进入DSP中断服务程序,为电机矢量控制提供数据信息。滑模观测器由低通滤波器等组成,建立滑模观测器软件算法流程。经转角补偿后得到转子角估算值。设计实验平台有控制板与永磁同步电机组成。对永磁同步电机矢量进行实验,通过实验平台测试调整系统参数,在额定功率内稳定运行。电机电流波形接近正弦波,实验证明控制系统设计方案可行有效。
6 结语
永磁同步电机具有功率因数高,便于控制等优点,在工业生产中得到广泛应用。以往交流电机控制系统需要利用传感器检测转子。文章设计永磁同步电机无传感器控制系统,具有鲁棒性强等优点。介绍永磁同步电机控制原理,推导电机坐标系数学模型,建立用词同步电机矢量控制系统;对画面变结构产生抖动问题分析,仿真验证削弱抖振方法有效性。推导出滑模观测器数学表达方式,引入卡尔曼滤波器设计,建立用词同步电机矢量控制系统,仿真表明设计观测器有效可行性。
猜你喜欢
防爆电机(2020年6期)2020-12-14 07:16:54
郑州大学学报(工学版)(2020年2期)2020-06-16 12:43:14
汽车电器(2019年2期)2019-03-22 03:35:16
光学精密工程(2016年3期)2016-11-07 09:03:49
大电机技术(2015年5期)2015-02-27 08:22:28
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
自动化博览(2014年6期)2014-02-28 22:32:16
河南科技(2014年23期)2014-02-27 14:19:00
河南科技(2014年11期)2014-02-27 14:17:15
科技创新导报(2012年15期)2012-04-29 19:36:25
