
深水拖曳式大功率时频发射与多链缆多分量电磁探测系统
2022-08-31 12:52王猛邓明余平殷长春陈凯罗贤虎
地球物理学报 2022年9期
王猛,邓明*,余平,殷长春,陈凯,罗贤虎
1 中国地质大学(北京),北京 100083 2 广州海洋地质调查局,广州 511458 3 吉林大学,长春 130026
0 引言
海洋可控源电磁探测方法(Marine Controlled-Source Electromagnetic, MCSEM)是目前海洋油气资源勘探和海底地质构造调查中不可或缺的物探手段之一(Johansen et al., 2019).自本世纪初开始,海洋可控源电磁探测方法逐渐进入国际油气勘查界,显示出明显的学术价值和应用前景(何展翔和余刚, 2008).国际上活跃的海洋电磁服务提供商挪威EMGS公司,主要采用传统单船作业方法,预先在海底沿测线布设若干台接收机,然后按照预定的测线拖曳大电流发射机(Mittet and Schaug-Pettersen, 2008),他们完成了数百次深水油气资源勘探任务,最大发射电流达10000 A,有效降低了钻井干井率;挪威PGS公司开发了单船拖缆式电磁探测系统并与拖缆地震勘探系统进行了融合,在浅水油气勘探领域取得了良好的应用效果(Zhdanov et al., 2012),目前该公司的电磁业务被加拿大OFG公司收购.具有学术影响力的研究机构包括:美国Scripps海洋研究所,他们除了开发了传统的单船海洋可控源电磁探测系统(Constable, 2013)以外,还开发了拖缆式的Vulcan探测系统,并应用于冻土层和天然气水合物的探测(Constable et al., 2016);加拿大多伦多大学开发了在海底拖曳的单缆电磁探测系统(Yuan and Edwards, 2000),德国BGR利用上述系统开展了海底冷泉和天然气水合物的探测研究(Schwalenberg et al., 2010)等.
20世纪末,以中国地质大学、吉林大学、广州海洋地质调查局和中南大学等所组成的团队,率先在国内开展海底大地电磁探测技术研究(何继善和鲍力知, 1999),2000年完成了国内首批海底大地电磁仪的研发(邓明等, 2003),并成功开展了南海海试(邓明等, 2002)和南黄海应用试验(魏文博等, 2009).2006年起,广州海洋地质调查局和中国地质大学(北京)在国家863计划支持下率先开展了海洋可控源电磁方法的研究,研发成功了国内首套拖曳式海洋可控源电磁探测系统(邓明等, 2010),包括发射机(王猛等, 2013)和接收机(陈凯等, 2012),于2010年完成国内首次海洋可控源电磁剖面测量工作.后续又在中国地质调查局的支持下,系统软硬件得到完善和升级优化,在南海天然气水合物资源调查中发挥了积极作用(景建恩等, 2016; 陈凯等, 2017).
1 系统整体设计
十三五期间,广州海洋地质调查局联合中国地质大学(北京)、吉林大学和中南大学等7家单位开展了双船拖曳式海洋可控源电磁勘探系统研发工作.本文探讨的深水拖曳式大功率时频发射与多链缆多分量电磁探测系统是国内首次提出的全新探测装置和工作方式.使用双船可以任意改变收发距,可以实现同线、旁线、同心圆和变方位扫面观测,其原理示意如图1所示.双船拖曳式海洋可控源电磁勘探系统仍属于MCSEM范畴.MCSEM用于油气和天然气水合物资源勘探,前人做过不少的研究.Constable和Weiss(2006)分析了MCSEM对不同深度高阻薄层的反映能力;赵峦啸等对频率域MCSEM海底油气勘探能力进行了讨论(Luanxiao et al., 2008);何展翔等(2009)开展了基于三维模拟的海洋CSEM资料进行了处理;刘长胜等(2011)对时频域方法进行了理论模拟并且评估了系统参数对油气可控源电磁勘探的影响.

图1 深水双船拖曳式海洋可控源电磁探测系统海上作业示意图Fig.1 Schematic diagram of offshore operation of deep water dual-ship towed MCSEM exploration system
为了指导双船拖曳式海洋可控源电磁探测系统设计,殷长春团队开发了面向目标自适应海洋电磁三维正演算法(殷长春等, 2019),并对海底起伏地形下埋有高阻异常体模型的不同装置海洋电磁响应进行了模拟,分析和总结了起伏海底地形对双船拖曳式海洋电磁系统响应的影响特征(Zhang et al., 2018),模型如图2所示.

图2 正演计算用的装置及模型(Zhang et al., 2018)Fig.2 Devices and models for forwardcalculation (Zhang et al., 2018)
通过与已有的结果进行对比分析(殷长春等, 2014),结果表明:1)对于同线和旁线观测,当发射系统或采集系统经过地形突变点时,海洋电磁响应曲线在相应的位置出现突跳,电磁响应幅值变化和海底地形之间存在良好的对应关系.采集系统经过海底地形突变点时造成的突跳更加明显,因此,发射和采集的定位,以及海底地形起伏对海洋电磁响应的影响不可忽视.2)同线观测对高阻异常体的反应能力很强,因此对海底高阻油气目标体进行探测时优选同线观测方式.3)该系统相较于传统的单船拖曳式电磁探测系统,双船作业方式更为灵活,能够实时调整收发距与观测方式,获得的数据集进行联合反演的结果优于单一数据集.上述研究结果为双船拖曳式海洋电磁系统设计和响应特征识别奠定了理论基础,具有指导意义.
2 拖曳式发射技术
天然电磁场传播至海底以后,由于深层海水的低通滤波作用,相对高频的电磁信号在海底变得微弱,无法产生一定信噪比的反射信号供电磁接收设备采集(Flosadóttir and Constable, 1996).因此需要人工电磁激励场源,以满足深部油气等目标的探测需求.
本论文设计的深水拖曳式大功率时频电磁发射系统,以下简称发射系统,主要包括甲板端和水下两个部分,工作过程是,船载大功率电能经深拖缆传输至海底,传输至海底发射方舱的三相高压电经过变压器降压后得到三相低压电,再通过整流桥整流和电容滤波,得到直流低压电,在智能化电路控制下,最后通过绝缘栅双极型晶体管(IGBT)模块组成的H桥对直流进行逆变处理,形成多频点的冲击逆变电流脉冲,实现近海底千安培级的大电流激发,建立超强的人工电磁激励场源(Wang et al., 2017).甲板端主要包括船载大功率发电机、甲板升压单元和仪器控制计算机等,水下部分主要包括发射机拖体、控制舱、发射方舱、发射偶极和超短基线USBL信标等部件,其原理框图如图3下半部分所示.本文设计的创新型发射方舱可以将大功率器件产生的热量通过舱壁高效耗散;新型的层叠母排设计,也有效减少了功率器件电气连接之间的杂散电感.
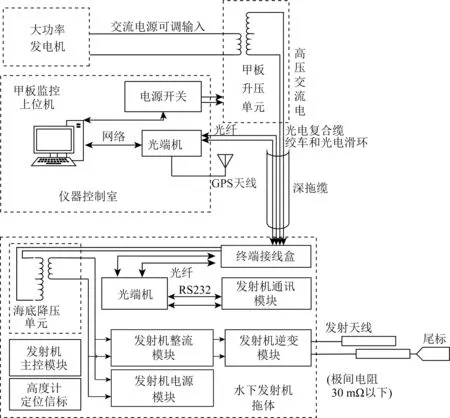
图3 深水拖曳式大功率电磁发射系统原理框图Fig.3 Block diagram of deep water towed high power electromagnetic transmission system
发射系统还包括远程通信、发射电流采集、电源管理、姿态方位采集、离底高度监测、拖体尾标声学通信、发射电压采集、辅助信息采集(Duan et al., 2019)等功能.发射系统中大电流逆变技术是关键,核心指标是最大发射冲击电流.本文设计最大发射电流1500 A,室内验证的发射电流是2280 A,海上验证的最大发射电流是1988 A,频率范围是0.01~16 Hz.这个指标处于国内领先和国际先进水平.
3 拖曳式采集技术
为了提高工作效率,节约船时,省去在海底布设固定式采集装置,本文设计的采集系统和发射系统一样,均由作业船只拖曳行进.该设计就可以根据勘探目标不同,采用灵活多变的方式进行观测,获得更多具有针对性的目标地质体信息.
多链缆多分量电磁探测系统,以下简称采集系统,由甲板控制端、拖曳式主采集站、若干台多分量电磁从采集站、中性浮力链缆以及尾标等组成,实现最大5个从节点链接,单个拖曳从节点测量并记录三轴正交的电磁场分量以及运动姿态信息(Chen et al., 2020),结构如图4所示.其中,甲板控制端实现电源控制、GPS授时、数据监控等功能;拖曳式主采集站实现指令传送、时间同步(Qiu et al., 2020)、数据存储与上传、电源管理等功能;从采集站中集成低噪声电场传感器和磁通门传感器、数据采集舱、高度计、运动传感器等.采集站之间由中性浮力链缆连接,保证指令和数据通过链缆进行实时交互.主节点汇总各从采集站的数据包,借助光纤缆发送至甲板端.PC可通过以太网访问甲板单元,甲板单元与主采集站之间通过光电复合深拖缆连接.深拖缆集成3条光纤和220VAC电力传输,为水下采集站提供220VAC电源、以太网.主采集站主要完成AC/DC和光电转换,为后续从采集站提供以太网通讯和48VDC,同时记录姿态、高度和深度等信息.从采集站负责多分量电磁信号采集,以及记录本站的姿态信息、高度和深度信息.同时,采用6支电极组成三轴正交电场传感器,实现对Ex、Ey、Ez三个分量电场的测量;磁通门传感器完成三轴正交Bx、By、Bz三分量磁场测量;采集舱内置电子部件,实现各传感器信号的高精度采集、存储和传输;高度计用于获取拖体离海底高度数据;定位信标实现拖体的水下定位,可获取拖体精确位置;拖体集成全部零部件,提供承载平台;浮体为采集站提供浮力,使得采集站浮力为中性;等浮缆将多台采集站连接,实现供电、通讯、牵引等功能.主采集站与尾标各安装一个USBL信标,用于实时获取位置信息.多链缆多分量电磁采集系统,在甲板端到海底各个采集站之间,构建了完整的数据链路和以太网链路.上位机可通过以太网链路实时查看各个采集站的姿态信息、高度深度信息及采集的电磁数据.

图4 多链缆拖曳式电磁采集系统原理框图Fig.4 Block diagram of multi-cable towed electromagnetic acquisition system
4 海洋试验及结果分析
2019年11月,广州海洋地质调查局组织第三方质量监督专家,利用海洋地质四号和海洋地质六号船开展了深水双船拖曳式海洋电磁勘探系统现场海试.海试任务来自于“深水双船拖曳式海洋电磁勘探系统研发” (2016YFC0303100)项目科研搭载,该项目是科技部“十三五”国家重点研发计划专项“深海关键技术与装备”下属项目之一.海洋地质六号船作为发射子系统海试母船,海洋地质四号船作为采集子系统海试母船.
双船拖曳式海洋电磁勘探系统共完成两次海上试验,工区位于南海北部珠江口东南部,航迹图和观测示意图如图5所示.第一次海试时间段为2019年11月9—12日,深水工区水深2000 ~2400 m,在神狐海域开展了同线观测方式的试验;11月13日—14日避风;第二次海试时间段为11月15—18日,在珠江口外海域动力定位点附近开展了4条测线工作,分别为2条同线、1条旁线和1条同心圆测线观测.同心圆的中心为拖曳式发射船.
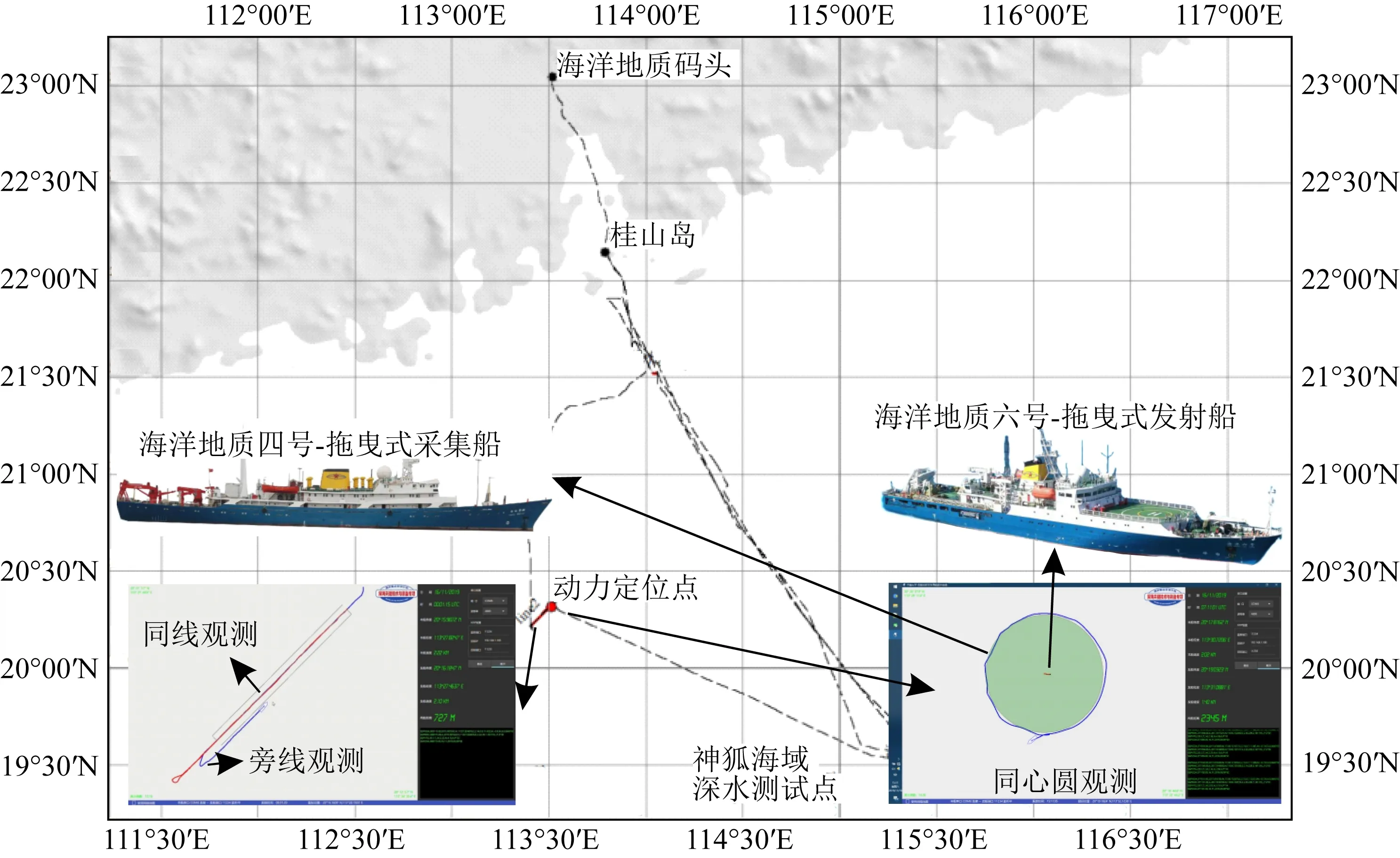
图5 试验海域位置及示意图Fig.5 Location and schematic diagram of test area
参加海试的发射系统包括甲板供电集装箱及其内部升压单元、发射拖体、发射天线和发射尾标,如图6所示.图6a左为发射电极集装箱,中间为一台400 kVA的柴油发电机(由于发射系统需要的发射功率较大,为了安全和布线方便,另外携带一台发电机作为主供电电源),右为甲板供电集装箱.图6b为大电流发射机拖体,长4.5 m×宽1.1 m×高1.3 m,重约2.5 t,采用船载的直径33 mm光电复合深拖缆为其提供电力和光纤通信支持.发射机拖体和图6d中的尾标拖体上各有一个超短基线USBL定位信标,用于确定前端和后端发射电极的水下绝对位置.发射机拖体和尾标拖体上还装有高度计,用于测量拖体和尾标距离海底的高度,为船载多波束测量的海底地形进行修订参考.图6c中的发射天线包括发射电缆和发射电极,均是中性浮力组件,便于在近海底进行拖曳.

图6 深水拖曳式大功率电磁发射系统参试设备(a) 甲板供电集装箱及其内部升压单元; (b) 发射拖体; (c) 发射天线; (d) 发射尾标.Fig.6 The deep water towed high power electromagnetic transmission system test equipment(a) Deck power supply container and its internal boosterunit; (b) The towed body; (c) Transmitting antenna; (d) Transmitter tail.
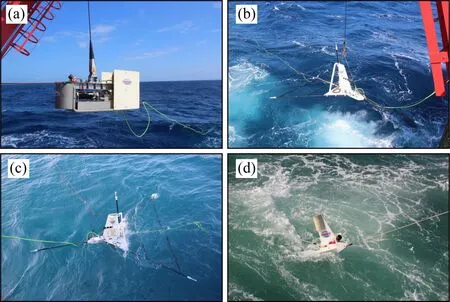
图7 多链缆拖曳式电磁采集系统参试设备(a) 拖曳式主采集站; (b) 从采集站A; (c) 从采集站B; (d) 采集尾标.Fig.7 The multi-cable towed electromagnetic acquisition system test equipment(a) Towed main acquisition station; (b) Collection station A; (c) Collection station B; (d) Tail tags.

图8 不同类型激发波形情况下的电流电压曲线(a) 频率型发射电流曲线; (b) 与1对应发射电压曲线; (c) 1∶10占空比的时间型发射电流曲线; (d)与(c)对应的发射电压曲线.Fig.8 Current and voltage curves under different transmission waveforms(a) Frequency type transmission current curve; (b) Transmission voltage curve corresponds to 1; (c) Time-type transmission current curve with 1∶10 duty cycle; (d) Transmission voltage curve corresponds to (c).
采集系统包括拖曳式主采集站、从采集站A、从采集站B和尾标,如图7所示.图7a中的主采集站采用光电复合缆与甲板端建立电力和通信连接,绿色的电缆为中性浮力的链缆,用于链接主采集站和从采集站,进行电力供应和数据传输(Chen et al., 2020)海试结果充分验证了发射系统和采集系统的功能和性能,各项技术指标均达到或超过了预定研究目标.代表性的试验结果曲线如图8、9和10所示.
对于不同类型激发波形情况下发射电压和发射电流曲线,如图8所示,即频率型曲线,俗称频域波形,占空比近100%;时间型曲线,俗称时域波形,占空比可调,图中展示的是1∶10的波形,系统可以实现1∶10到1∶100可调的占空比输出.在频域波形情况下,最大发射冲击电流达1988 A,如图8上边两个图形所示.无论在频域和时域波形情况下,发射电压波形在关断和开启的瞬间均会产生电压尖峰,由于电压波形采样率有限,尖峰波形不能完整展示.
拖曳式电磁场采集会引入运动噪声,导致采集到的电场和磁场信号本底噪声较大.图9展示了在发射频率0.1 Hz和发射电流1500 A情况下,从采集站A截取的某段时间序列曲线.从图中可以看出,Ex、Ey通道信噪比较好,Ez信号不佳,磁道对人工场源信号灵敏度低.
观测的电磁信号数据时频谱见图10,给出了两个从采集站分别在同线和旁线两种情况下部分电场分量的短时傅里叶变换时频谱图.不同颜色代表了信号强弱,红色代表信号强,蓝色代表信号弱.图10a是同线测量方式下,从采集站B的Ex分量时频谱图.人工源发射波形为0.25 Hz的方波.

图9 从采集站A截取的某段时间序列曲线Fig.9 A certain period of time series curve intercepted from collection station A

图10 时频谱图(a) 同线,从采集站B,Ex分量; (b) 旁线和同心圆,从采集站B,Ex分量; (c) 旁线和同心圆,从采集站B,Ey分量; (d) 旁线和同心圆,从采集站A,Ex分量; (e) 旁线和同心圆,从采集站A,Ey分量; (f) 旁线和同心圆,从采集站B,Ez分量.Fig.10 Time spectrum diagram(a) Axial line, acquisition station B, Ex component; (b) Sideline, concentric circles, acquisition station B, Ex component; (c) Sideline, concentric circles, acquisition station B, Ey component; (d) Sideline, concentric circles, acquisition station A, Ex component; (e) Sideline, concentric circles, acquisition station A, Ey component; (f) Sideline, concentric circles, acquisition station B, Ez component.
图10(b—f)前半段(02∶24之前)为旁线测量,后半段为同心圆观测方式.图10b为旁线和同心圆方式下,从采集站B的Ex分量时频谱图.发射波形0.25 Hz的方波.通过对比图10a和图10b可以发现,近似收发距情况下(收发距约为720 m),同线测量模式的电场响应幅度大于旁线测量方式.
图10c为旁线和同心圆方式下,从采集站B的Ey分量时频谱图.通过对比图10b和10c发现,Ey分量与Ex分量的时间一致性较好,但其场值较Ex分量的场值小.
图10d和图10e为旁线和同心圆方式下,从采集站A的Ex和Ey分量时频谱图.通过对比图10b、图10d和图10e发现,从采集站A的Ex分量较从采集站B的Ex分量场值略小,原因为从采集站B的Ex极距大于从采集站A.同样,从采集站A的Ex分量较Ey分量场值略大.
图10f为旁线和同心圆方式下,从采集站B的Ez分量时频谱图.该分量的幅度比Ex和Ey分量幅度均小.
根据从采集站A和B时间序列的时频谱图分析可以获悉,Ex、Ey分量信噪比较高,人工源信号清晰可见,Ez分量信噪比相对较低,这与Ex、Ey和Ez的极距分别为5 m、4 m和2 m相对应.从此也可以得到,增加极距可以显著提高信噪比.五张图中,无论人工源信号是否在激发,所采集的信号中均存在一个以2 Hz左右为基频的频率,该信号可能与拖曳运动过程中产生的有规律运动噪声有关;在0.1~0.2 Hz范围内也存在较大的背景噪声,可能与海浪噪声有关,若要激发相关频率,则必须增加发射源偶极矩,以抑制海浪噪声,这也为以后的电磁发射提供了频率选择参考.
总体而言,各个采集站的一致性较好,完整地反映了人工源信号的激发过程,从而证明了深水拖曳式大功率时频发射与多链缆多分量电磁探测系统工作正常,可以获取到信噪比高的数据,显著提升数据质量和有效的数据数量,为后续处理和反演提供技术支撑.
5 技术指标与对比
经过室内测试和海上试验验证,本文所设计的深水拖曳式大功率时频发射与多链缆多分量电磁探测系统的技术指标总结如表1所示.由于国内外并未有类似的双船全拖曳式电磁探测系统,仅能与国际上同类型的美国Scripps海洋研究所、挪威PGS公司和国内有关单位研制的相近全拖曳式电磁系统进行对比.国内中国海洋大学和山东蓝海可燃冰勘探开发研究院有限公司(余刚等, 2020)正在攻关类似系统.
6 结论与展望
(1)以理论正演为出发点,在国内首次提出了双船全拖曳式海洋可控源电磁探测技术,突破了近海底条件下的大电流拖曳式发射关键技术,解决了全链缆多通道动态三轴电磁场的实时高精度采集和传输难题.

表1 硬件系统技术指标表Table 1 Technical specifications of hardware system
(2)发射系统和采集系统分别由两艘船拖曳行进,可以根据勘探目标不同,采用灵活多变的方式进行观测,获得更多具有针对性的目标地质体电性异常信息.同时克服了常规海洋可控源电磁探测方法作业效率不高的难题,无需提前在海底布设接收装置,可以节约大量的船时,提高工作效率,这对有限的海上作业时间窗口至关重要.
(3)所研发的装备技术将为后续开展海底资源调查,尤其是深水油气、天然气水合物、块状金属硫化物以及海底其他矿产资源勘探提供高技术支撑.另外,也可以用于浅部地质构造探测、滑坡灾害预警、水中静止和移动目标探测等领域.
致谢向各位审稿人及编辑表示衷心感谢.向团队的其他成员,包括所有参与双船拖曳海洋电磁系统研发的项目组成员表示感谢,同时也感谢海洋地质六号与海洋地质四号船全体船员的大力支持.
猜你喜欢
华人时刊(2022年3期)2022-04-26
黄河之声(2022年1期)2022-03-16
资源信息与工程(2021年5期)2022-01-15
黄河之声(2021年21期)2021-03-22
军民两用技术与产品(2021年9期)2021-03-09
华人时刊(2020年19期)2020-11-17
铁道通信信号(2020年9期)2020-02-06
中国生物医学工程学报(2019年4期)2019-07-16
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2018年23期)2018-12-26
