
混合动力汽车电动机辅助控制策略研究
2022-08-31 04:13薛涛
汽车零部件 2022年8期
薛涛
延安职业技术学院,陕西延安 716000
0 引言
随着全球环境和资源等问题的日益突显,为降低汽车排放,目前全球主要汽车制造企业的发展方向已从传统燃油汽车转向新能源汽车。现阶段我国新能源汽车技术处于快速发展和推广期,同时随着驱动电机、动力电池的不断技术突破与创新,新能源汽车产业成为我国节能减排的重要途径。新能源汽车目前主要包括纯电动汽车、混合动力汽车以及燃料电池汽车3种类型,其中混合动力汽车是传统汽车向纯电动汽车过渡的理想方案。2021年中国新能源汽车产量达354.5万辆,较2020年增加了217.90万辆,同比增长159.52%,占全国汽车总产量的13.59%。新能源汽车占比增加,可有效平衡能源与经济发展之间的矛盾,目前也是我国汽车发展的一项重要措施。混合动力汽车相较于传统燃油车动力结构,主要增加了驱动电机,且动力电池作为储能装置。本文通过制定合理的电动机辅助控制策略可实现整车最优动力性和经济性,在车辆开发仿真阶段中,控制策略逻辑设计发挥着重要的作用。
1 整车结构与技术参数
1.1 整车结构
混合动力汽车结构主要分为串联式、并联式以及混联式3种类型,其中混联式结构兼顾了前两种结构的优点,系统可有效发挥整车动力性和经济性。本文以混联式结构为研究基础,动力系统中发动机与驱动电机MG2分别在输出端设置离合器与变速器连接,可实现两种动力源独立驱动车辆,如图1所示。另外,系统还设置发电起动一体机MG1及蓄电池。变速器采用“两轴+平行轴”结构,分别与驱动电机和发动机连接,最后共同作用于主减速器输出动力。系统结构的主要特点表现在发动机和驱动电机MG2输出轴上安装离合器,动力系统在工作时,控制策略根据动力需求控制离合器工作,通过各部件协调输出动力,满足车辆行驶,最后可实现车辆的多种动力需求。

图1 混联式混合动力汽车结构
1.2 系统技术参数
本文以较为成熟的混合动力汽车作为研究对象,依据整车动力总成系统参数,并利用AVL CRUISE软件完成整车仿真模型的建立及仿真分析。选用某公司生产的混合动力汽车作为仿真测试的参考车型,动力系统基本技术参数见表1,其中驱动电机MG2类型为永磁同步电机,发电机MG1类型为ISG。测试车型技术参数见表2,其中车轮规格为205/55 R16。
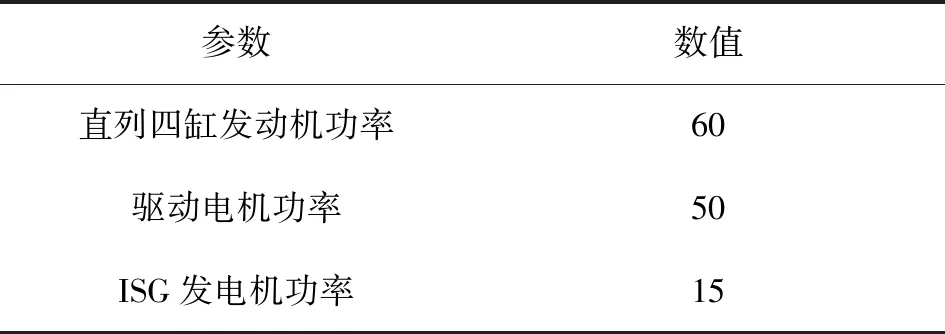
表1 动力系统基本技术参数 单位:kW

表2 测试车型技术参数
2 整车模型
根据车型结构建立整车模型,如图2所示。在仿真软件中根据需求设置车辆各部件,主要完成整车参数、发动机、蓄电池、离合器、发电机MG1、驱动电机MG2、变速器等主要动力系统部件。同时根据控制策略需求设置驾驶员和Matlab-Interface等控制模块,其中动力和能量传递部件主要通过机械连接和电气连接来完成。机械连接主要表现为动力传递方向,由发动机、驱动电机、离合器、变速器等部件来完成;电气连接主要表现为能量流传递方向,由动力电池、发电机和驱动电机来完成。机械连接和电气连接信号遵循整车控制策略的输入和输出变量。

图2 整车仿真模型
3 控制策略设计
3.1 电动机辅助控制策略
能量控制策略是混合动力汽车整车运行的顶层逻辑,其合理性可有效协调各动力部件的输出效率,最后提升整体性能。另外,能量控制策略的稳定性决定车辆工作模式的切换,随车辆动力需求的变化,控制策略的快速响应同样影响车辆的整体性能。现阶段能量控制策略可分为两类:基于规则和基于优化的能量控制策略。本文根据车型需求与控制变量选择基于逻辑规则中的电动机辅助控制策略,其动力系统转矩与速度的逻辑关系如图3所示。

图3 动力系统转矩与速度的逻辑关系
电动机辅助控制策略特征主要体现在通过蓄电池的状态变化来控制发动机和驱动电机的工作状态,车辆行驶中所需功率主要根据需求功率变化来判断发动机的工作与否和驱动电机的介入情况。电动机辅助控制策略划分了发动机工作区域和驱动电机介入条件。动力系统可实现动力部件独立工作,也可驱动电机辅助动力。发动机和动力电池两者协调动力输出,保持整车运行稳定,同时也能保持蓄电池充电和放电正常,延长其循环寿命和避免过充和过放。
3.2 控制参数确定
根据电动机辅助控制策略设置运行模式,详见表3。

表3 运行模式设置
根据运行模式,需设置蓄电池上下限值、发动机介入车速、制动能量回收最低车速、充电最大转矩和充电功率上限。相关控制变量参数见表4。

表4 相关控制变量参数
3.3 基于SIMULINK控制策略设计
控制策略模块如图4所示,主要包括输入信号、输出信号、模式切换模块、转矩计算模块和转矩分配模块。其中输入信号和输出信号是控制策略与仿真模型连接的数据,根据输入信号数据,控制策略可计算出车辆此时所需转矩等参数需求;模式切换模块主要根据参数需求进行模式选择,从而进行各动力部件的转矩分配和信号输出,满足车辆行驶要求。
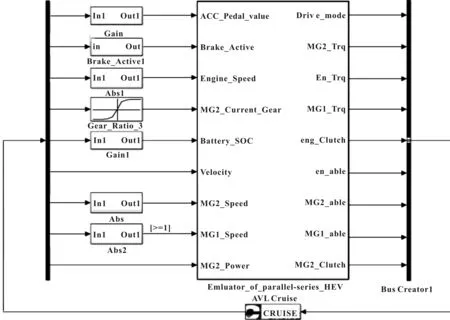
图4 控制策略模块
4 控制策略验证
4.1 AVL CRUISE与MATLAB数据连接
CRUISE-Interface控制参数如图5所示,验证控制策略是否满足仿真车型需求,需通过Interface模块与控制策略连接实现信号数据处理。

图5 CRUISE-Interface控制参数
4.2 仿真测试
图6为车辆速度跟随曲线,由图可知,所设计控制策略可满足NEDC循环工况。预期车速与实际车速吻合,只有在最高车速处,曲线出现轻微偏差。

图6 车辆速度跟随曲线
动力电池运行曲线如图7所示。根据蓄电池电压、等参数变化,蓄电池容量保持在60%左右,可稳定驱动电机供电。

图7 动力电池运行曲线
整理仿真数据,可得出仿真车型动力性与经济性参数,详见表5。

表5 仿真车型动力性与经济性参数
根据仿真测试数据可验证此控制策略的正确性和稳定性,并得出电动机辅助控制策略符合设计方案,仿真测试数据符合车型相关技术参数要求。
5 结论
能量控制策略是汽车研发过程中的重要步骤,通过研究混合动力汽车控制策略,利用仿真软件测试其合理性。仿真结果验证了该控制策略符合车型技术参数要求,可实现各个运行模式切换,满足车型不同动力需求,且经济性能良好。由于此类型混合动力系统需要实现发动机和驱动电机系统耦合,为更精确控制系统需要,从参数匹配方式、软件模型、控制策略和实车测试等方面进行优化。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年12期)2022-07-05
现代电子技术(2022年10期)2022-05-13
汽车实用技术(2022年5期)2022-04-02
飞控与探测(2022年1期)2022-04-02
科技创新与应用(2020年15期)2020-05-21
电机与控制学报(2018年9期)2018-05-14
中国高新技术企业(2016年35期)2017-02-10
科技视界(2016年18期)2016-11-03
