
基于空间坐标变换的融合算法
2022-08-30 03:43王浩丞
舰船电子对抗 2022年4期
王浩丞
(电子信息控制重点实验室,四川 成都 610036)
0 引 言
随着电磁对抗技术的发展,传统单模传感器面临越来越大的技术挑战。采用主动雷达体制的传感器(简称主动传感器)具有全天时探测、测向精度高、可精确测距等优点,但易受有源电子干扰和无源假目标的影响。采用被动雷达的传感器(简称被动传感器)具有远距离截获、电磁静默、先敌发现的优点,但难以获得准确的距离信息,同类型多目标分选难度较大。基于主、被动复合的传感器可以综合两者优点,实现两者的性能互补,提高作战保障能力。
主动传感器主要面临抗有源干扰和无源干扰的压力。在噪声压制干扰情况下,有可能不能实现稳定的航迹跟踪。在角度或距离欺骗干扰情况下,有可能跟错目标。在假目标干扰情况下,也有可能跟错目标。
被动传感器具备远距离截获能力,但被动传感器获取的信息主要包含电磁参数和角度信息,无法直接获得较为精确的距离信息。目前,被动传感器通常依靠角度信息形成角度航迹跟踪,但随着传感器与雷达距离变化、传感器自身姿态变化等因素导致被动角度航迹剧烈变化,使得航迹跟踪时被动角度聚类的门限较大,且聚类持续时间较短;另一方面,聚类速度慢,实现时间滞后。
目前主被动复合传感器主要采用角度信息融合,本文提出了一种位置聚类和融合方法,用于主被动复合传感器。相比于角度融合,可以更早地分开多个目标,且聚类效果更加稳定,提高复合传感器融合目标选择的能力。
1 探测目标场景
在目标海域内存在多部同型号雷达,分布如图 1所示。被动传感器探测距离较远,多部雷达的辐射信号均可以截获,并测量其角度;受目标物理尺寸、材料、角度等影响,主动传感器对不同目标探测距离差别较大,同时通常跟踪一个目标。

图1 多部雷达布置图
主被动复合传感器需要通过被动传感器、主动传感器及主被动信息融合的方式从雷达阵地附近筛选出雷达目标。被动传感器可以从远处同时获取多个雷达的信号,但由于同类型雷达电磁参数相近,需要依靠角度信息进行目标聚类;同时被动传感器不能直接获得较为精确的距离信息,因此只能提供多个角度信息参与融合。
另一方面,主动传感器的角度跟踪范围较窄,需要被动传感器提供引导搜索目标。在主动传感器受到有源干扰时,可能难以实现对目标的稳定跟踪,需要被动传感器维持对目标角度的跟踪。另外,通过主被动复合,可以降低主动传感器受假目标诱偏的概率。
2 传感器定位和位置融合方法
2.1 目标定位方法


(1)
在预示点北天东坐标系下,平台指向目标的矢量为:

(2)


(3)
式中:表示预示点北天东坐标系转平台坐标系的转换矩阵,因此在预示点北天东坐标系中,目标的位置为:


(4)
定位精度主要取决于距离、测向误差和平台飞行轨迹,距离越小,测向误差越小,高度越高,则定位精度越高。惯导虽然存在位置误差和姿态误差,但在短期内惯导的误差基本不变,可以认为是个固定误差,对位置聚类和融合的影响可以忽略。
2.2 多目标位置聚类和融合方法
多目标位置聚类和融合方法的流程图如图 2所示,过程如下:

图2 复合传感器位置聚类和融合流程

(2) 主动传感器用单脉冲进行测向测距,获得目标的角度和距离信息[,,]。
(3) 根据主动传感器测向测距结果,结合上一小节的计算公式,计算出主动目标在预示点北天东坐标系下的位置:

(5)
(4) 根据被动传感器测向结果,借用主动测距信息,结合上一小节的计算公式,计算出被动多个目标在预示点北天东坐标系下的位置:

(6)
(5) 对被动多目标测量位置样本量进行积累,积累到一定数量后完成堆中心的初始化。
(6) 根据K均值法对被动测量的各个目标进行聚类,并计算堆的中心。每个堆存放的数据时间不超过1 s,滑动更新(下节为方便分析,只给出不同时间段的数据)。
(7) 将主动目标定位结果和被动的多目标定位结果一一比较,计算它们的空间距离,并将距离和设定门限比较,小于门限表示融合成功。
3 仿真结果
3.1 仿真场景和条件假设
假设主动传感器进行测角测距,角度测量误差标准差为0.2°,误差均值为0.1°,测距误差标准差为4 m,误差均值为2 m。被动传感器测向误差标准差为0.4°,误差均值为0.2°。阵地布置有4部同类型、不同个体雷达,如图 1所示。在预示点北天东坐标系中雷达位置如图 3所示。

图3 预示点北天东坐标系中雷达相对位置
3.2 传感器测向测距仿真结果
仿真过程中传感器的位置和姿态角结合工程经验进行设定。被动传感器可以同时测量多个目标。结合上节的条件假定,多目标角度跟踪航迹仿真曲线如图 4所示。传感器自东向西移动,如图中所示,4个目标在方位角差异大,俯仰角差异小。平台距离目标越近,多目标角度区分得越开。

图4 被动传感器角度航迹跟踪仿真结果
主动传感器进行单脉冲测距、测向,一般只能跟踪1个目标,假设跟踪的目标是雷达,角度航迹跟踪仿真曲线如图 5所示。

图5 主动传感器距离和角度航迹跟踪仿真结果
3.3 传感器角度聚类和角度融合


图6 被动传感器角度聚类结果
如果直接采用角度差进行融合,在末端主被动角度融合结果如图 7所示。如果角度融合门限取为1.5°,从图7可以看到,只有在第4 s后(200帧以后)才能逐渐将其中的雷达角度分开。
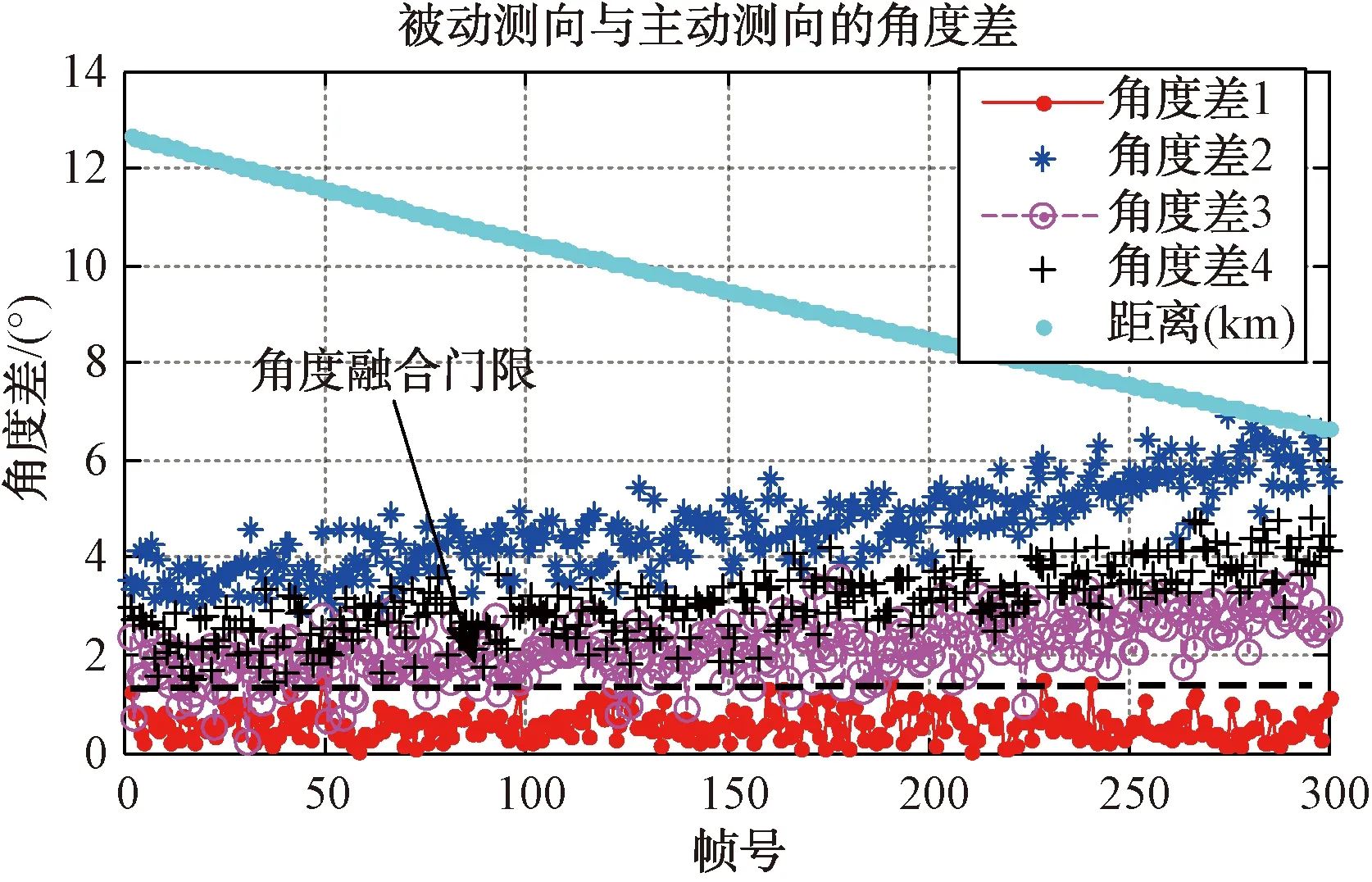
图7 主被动角度直接融合结果
如果对角度先进行聚类,再将被动测向的多个角度堆中心和主动测角堆中心进行融合,结果如图 9所示。采用角度堆中心融合后,同样门限的情况下,可在3.5 s分开多部雷达。

图8 主被动角度堆中心融合结果
3.4 复合传感器位置聚类和位置融合
基于3.2节的被动多目标测向信息,结合主动测距信息,通过2.2节的被动目标定位公式,可以计算在预示点北天东坐标系下的多目标位置。仿真结果如图 9所示。图 9中6幅图分别为6 s时间的位置聚类结果,每幅图横轴、纵轴跨度都是700 m。从图9可以看到,在第1 s内(平台距离目标为12.5 km时,对应时间记为0 s),通过位置聚类可以明显区分多部雷达。随着距离的减小,雷达聚类效果更为稳定。

图9 被动传感器位置聚类结果
位置融合结果如图 10所示,其中的位置差等于2个定位点之间的水平距离。如果位置融合门限取为180 m,从图10可以看到,在第0.1 s后就能逐渐保证融合成功,但存在一定的虚警和漏警概率。详细位置融合结果如图 11所示。由于定位误差的存在,依靠被动测向进行无源定位的目标雷达位置可能在融合圈以外,导致漏检。同时,其他雷达可能在融合圈里,导致虚警。随着平台距离目标的减小,定位精度变高,漏检和虚警的概率逐步减小。
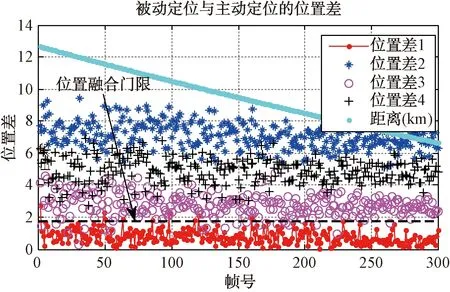
图10 主被动直接位置融合结果
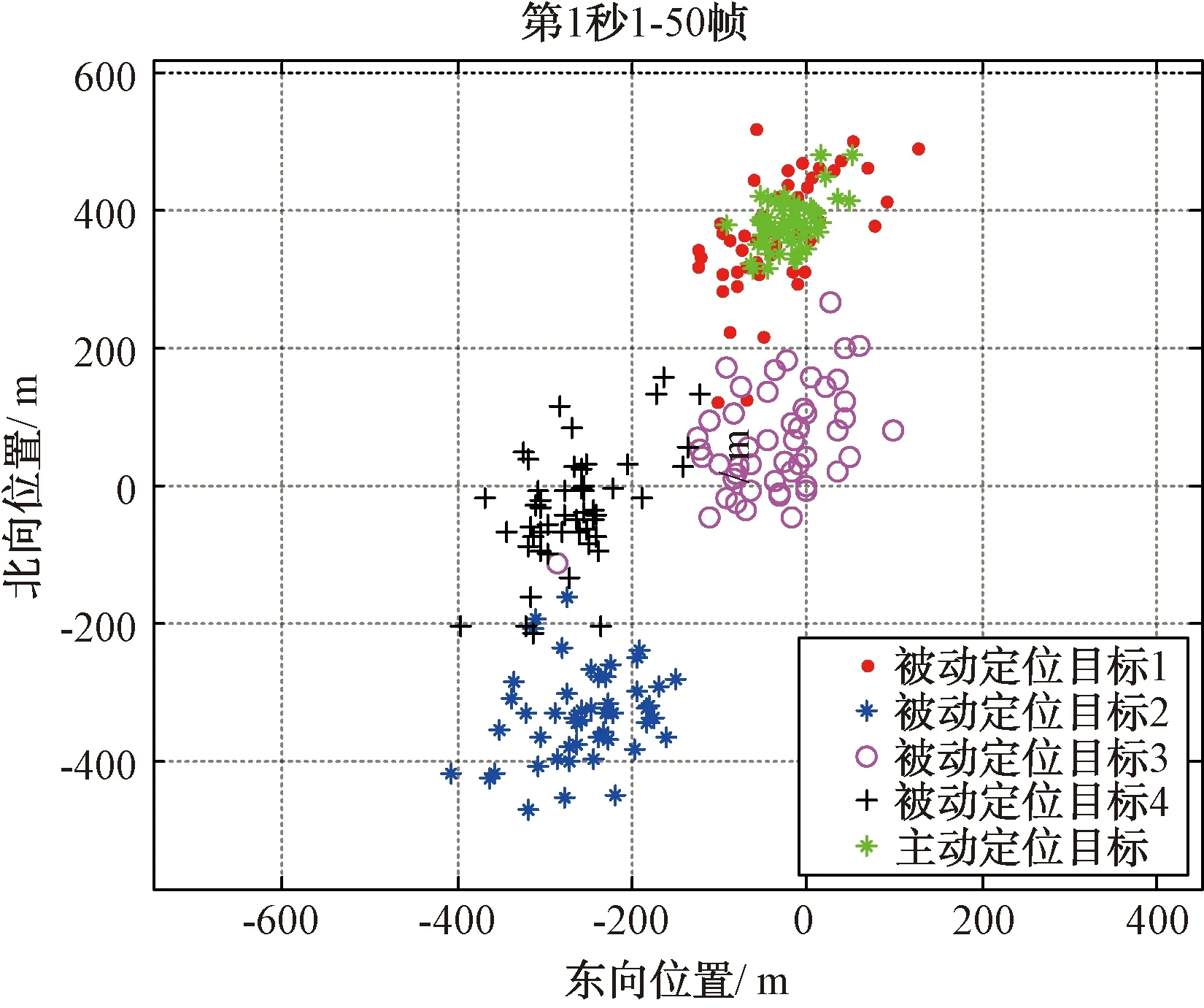
图11 复合传感器主被动位置融合示意图
如果采用位置堆中心融合,结果如图 12所示。位置融合门限仍然取为180 m,从图 12可以看到融合成功概率大大提高,虚警和漏警概率大大降低。

图12 主被动位置堆中心融合结果
不同融合方法的漏检和虚警概率统计结果如表 1所示。从表中可以看到,位置堆中心融合方式效果最好。
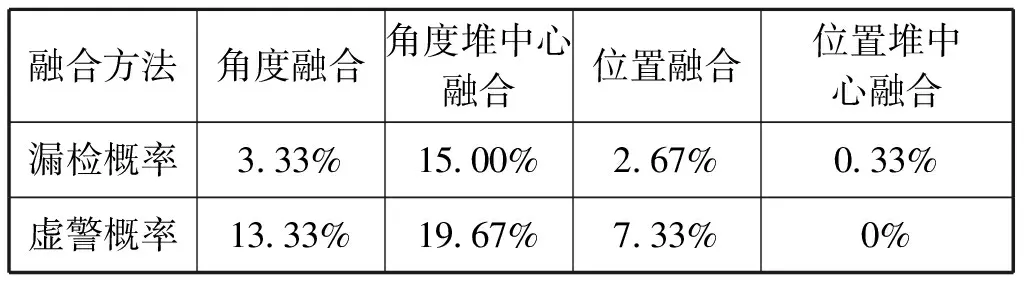
表1 漏检和虚警概率统计
综上,由于传感器在运动中,传感器对目标的测向结果随着平台距离和姿态变化,但在北天东坐标系下,目标的位置不变,对比位置聚类和角度聚类结果,位置聚类相对于角度聚类可以提前分开多部雷达,而采用位置中心聚类的方法能够进一步提前聚类的时间,并提升其虚警和漏检性能。
4 结束语
本文给出了一种目标位置融合方法,用于复合传感器目标融合。相比传统角度融合,采用主被动位置聚类和位置堆中心融合方法可以提前分开多个目标,且稳定性更好,可以提前实现被动和主动跟踪目标的融合。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
VOGUE服饰与美容(2020年5期)2020-09-03
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
电子技术与软件工程(2016年23期)2017-03-06
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
海峡科学(2013年3期)2013-10-21
数学大世界·小学低年级辅导版(2010年4期)2010-03-25
