
氢燃料商用车整车能量管理技术研究
2022-08-29 08:01杨志超袁世豪张学锋
汽车电器 2022年8期
杨志超,武 增,王 健,袁世豪,张学锋
(大运汽车股份有限公司技术中心,山西 运城 044000)
作为新能源汽车发展的三大路线之一,随着国家相关激励政策的出台,燃料电池汽车产业进入发展快车道,尤其是中远途、中重型氢燃料电池商用车在示范运营区的需求也逐步增多,市场竞争态势也逐步显现,为保证整车的市场竞争力,除整车集成技术外,整车的控制技术尤为关键。
氢能源商用车整车控制技术中整车能量管理技术最为核心,氢能源商用车整车能量来源以氢燃料发动机为主,动力电池为辅。氢燃料发动机发出的电能既可以用于驱动电机,也可以给动力电池充电,动力电池既能为驱动电机提供所需能量,又能回收整车回馈的能量。如何将动力系统的能量输出和回馈合理地控制,以保证动力性、经济性和各系统的使用寿命,是我们要研究的方向。
1 氢燃料商用车动力系统控制架构
氢燃料商用车动力系统控制架构除负责整个系统的协调控制工作的整车控制器(VCU)外,还包含燃料电池系统、动力电池系统、电机电控系统、动力传动系统、高压配电系统及整车附件等,具体见图1。
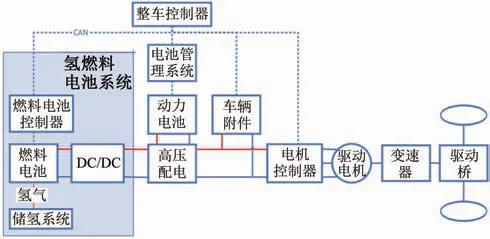
图1 氢燃料商用车动力系统控制架构
氢燃料商用车动力系统控制架构是一个耦合性很强的电气系统,氢燃料电池系统通过DC/DC变换器以提升和稳定电压输出,给整车驱动系统输出能量,但考虑到燃料电池系统响应时间慢及本身其他性能的不足,系统增加符合整车功率及容量需求的动力电池系统来弥补。整车控制器(VCU)进行动力系统的协调控制工作,实现车辆在多动力源(动力电池、燃料电池、电机能量回收)之间的能量分配,从而达到更好的经济性和动力性。
2 氢燃料商用车整车动力系统工作状态
为满足整车的正常运行,氢燃料商用车整车在不同状态下,燃料电车系统及动力电池系统的工作状态见表1。
从表1中可反映出,在整车不同工作模式下,燃料电池系统和动力电池系统可能出现不同的工作状态,并且电驱系统工作时整个动力系统能量的输出和输入状态也不同,具体有以下几种模式。
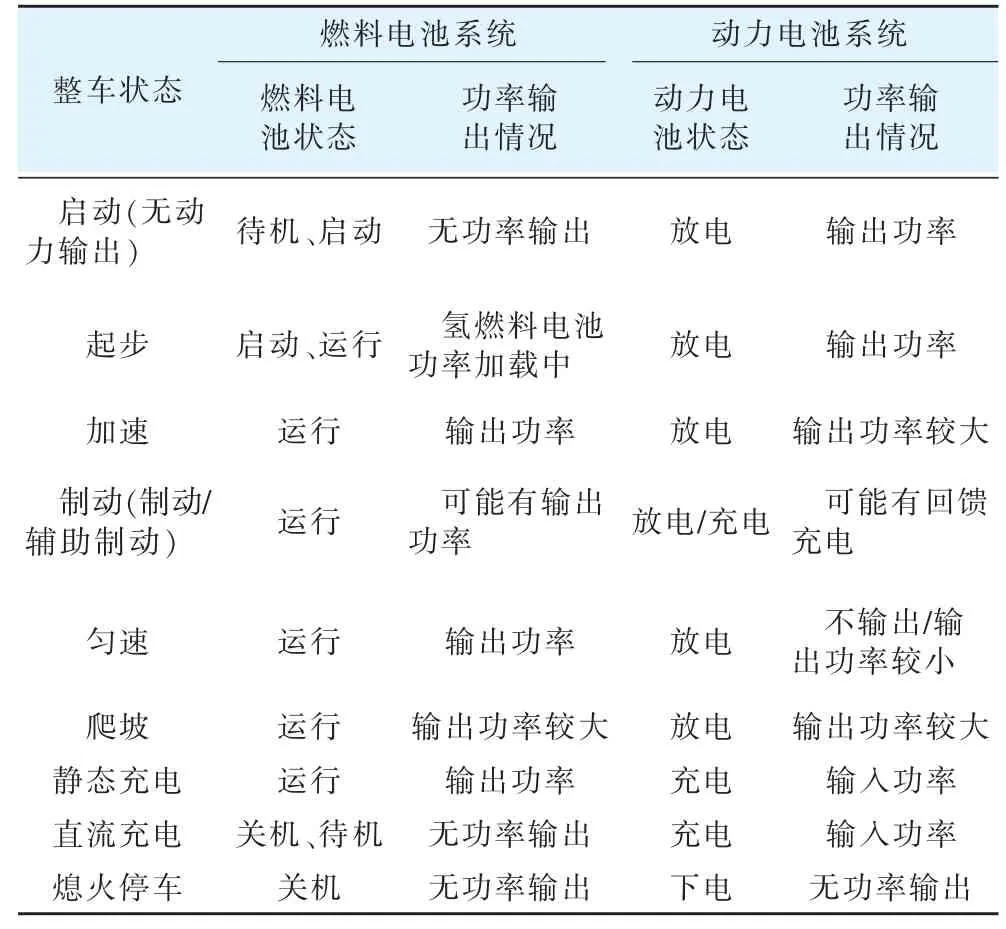
表1 燃料电车系统及动力电池系统的工作状态
1)燃料电池和动力电池共同驱动模式:燃料电池在启动状态稳定后,整车需求功率较大且燃料电池可输出功率无法满足时,如整车爬坡、加速时,功率需求短时间增大,燃料电池功率升载速率无法满足或重载运行情况下燃料电池满功率输出也无法满足整车需求功率,此时剩余的功率需求就由动力电池来提供,保证整车的动力性。如图2所示。
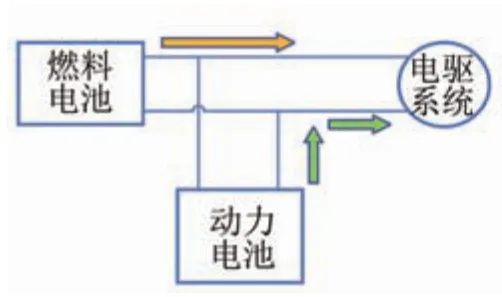
图2 燃料电池与动力电池共同驱动
2)燃料电池系统单独驱动模式:当燃料电池工作趋于稳态且输出功率能够满足整车功率需求时,由燃料电池单独为驱动系统提供动力,此时动力电池无充电需求且不输出功率。由于现阶段燃料电池本身功率的限制,此工况只有在整车运行负载较小时出现。如图3所示。
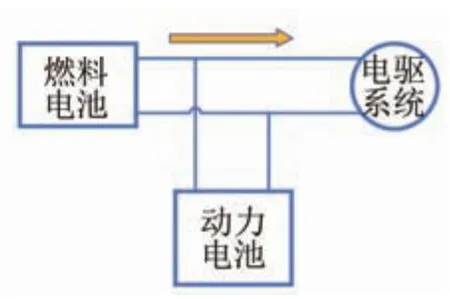
图3 燃料电池与动力电池共同驱动
3)动力电池单独驱动模式:当动力电池SOC高于需要充电的阈值上限,且燃料电池此时处于未开机的状态。此时车辆运行将完全由动力电池系统提供能量(若适配的动力电池放电倍率较低时,纯电模式运行不适合重载车况)。此种模式下,燃料电池系统仅被唤醒,处于关机或待机状态,仅作为总线节点实时上报燃料电池参数状态。如图4所示。

图4 动力电池单独驱动
4)燃料电池驱动并给动力电池充电模式:整车运行过程中,燃料电池工作趋于稳态,整车驱动功率需求较小,且动力电池可允许充电且SOC满足充电条件时,燃料电池系统为整车提供驱动需求功率,并在动力电池系统的最大可持续充电电流限值内,对动力电池进行充电。如图5所示。
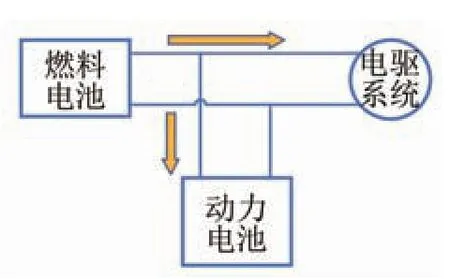
图5 燃料电池驱动并给动力电池充电
5)车辆静止状态燃料电池给动力电池充电:当车辆启动处于静止状态,动力电池SOC值较低,此时虽然整车无驱动需求,为了保证整车能够满足各工况正常运行,在不通过充电桩充电,使动力电池SOC维持在平衡的状态下,由燃料电池系统提供电能给动力电池系统充电。如图6所示。

图6 车辆静止状态燃料电池给动力电池充电
6)能量回馈模式:当车辆行驶过程中执行减速制动或开启辅助制动功能时(减速、下坡、遇红灯减速制动及其他非紧急制动),且动力电池SOC值在可充电阈值内时,动力电池系统允许整车进行能量回馈,整车将制动产生的电能回馈给动力电池系统达到整车节能的效果。车辆运行过程中燃料电池工作,整车减速制动时,由于燃料电池系统的响应时间相对滞后,此时燃料电池和驱动电机共同给动力电池回馈电能(图7)。若燃料电池不工作,则驱动电机给动力电池回馈能量(图8)。同时考虑动力电池过充的保护机制。

图7 燃料电池与电驱共同给动力电池回馈
7)其他模式:除了以上模式外,整车在停火状态下,可能存在停车充电模式和停车熄火模式。如图9、图10所示。
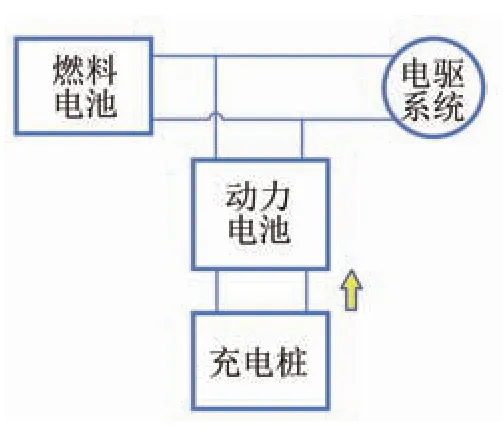
图9 停车充电桩直流充电
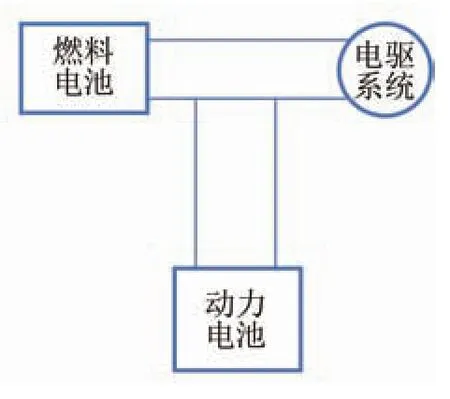
图10 停车熄火
3 能量管理控制方案
整车动力系统在不同的工作状态下有不同的能量流动方式,依据驾驶员意图要求就需要一套完整的既要满足整车各状态下运行需求又要符合现阶段各系统部件特性的整车能量管理策略。
3.1 控制需求因素
1)能量输出要满足整车各状态下的动力及附件功耗的需求。
2)考虑现阶段燃料电池系统技术如功率偏小、升降载速率慢、不能频繁启停等限制,燃料电池在工作中要使其尽量保持稳态或准稳态,剩余功率由动力电池辅助提供。
3)考虑动力电池的自身特性,避免动力电池过充过放,控制其SOC保持在合理的范围内,达到安全、可靠、经济的效果。
整车运行过程中,能量控制要结合整车的功率需求、氢燃料电池状态、动力电池SOC及其充放电能力,来分配燃料电池系统与动力电池系统所需的输出或输入功率。整车控制器依据驾驶员意图如油门踏板、制动踏板等数据求得电机需求功率,再加上整车其他附件如空调、PTC、油泵等所需消耗的功率,最后确定燃料电池系统、动力电池、电机回馈的功率输出或输入状态。
3.2 控制策略设计
整车控制器接收动力电池BMS发出的SOC值及当前电池可允许持续充、放电电流、可允许的峰值充、放电电流,根据当前整车运行状态向燃料电池系统发送燃料电池系统启动、关机及功率输出指令,为了避免燃料电池系统频繁起停,VCU必须在SOC跳变点进行滞回控制;控制电机保障在整车制动能量回收或辅助制动激活时可输出的功率范围。在保证整车动力性的前提下,尽量维持燃料电池的输出功率稳定,且不让动力电池处于过充或过放的状态。
1)燃料电池与动力电池共同驱动,工作状态的能量流如图2所示。当满足燃料电池工作条件,动力电池SOC<SOC,例如在急加速车况中,由于燃料电池加载较慢,由电池来承担瞬时的剩余部分功率输出:
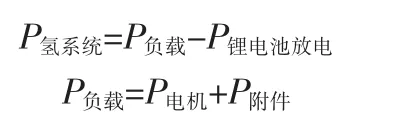
当整车需求功率长时间大于燃料电池可输出功率时,例如重载上长坡的车况下,氢燃料电池已运行到最大功率点,动力电池需要较长时间承担不足部分功率输出。此时的功率平衡关系为:
2)燃料电池单独驱动并给动力电池充电,工作状态的能量流如图5所示。当满足燃料电池开启条件,动力电池SOC<SOC,且整车需求功率介于燃料电池的最小输出功率及最大输出功率之间时,VCU向燃料电池请求的功率根据汽车消耗功率需求进行调整,燃料电池输出的功率不仅要满足整车行驶功率,还要对动力电池进行充电。此时功率平衡关系为:

3)动力电池单独驱动状态,工作状态的能量流如图4所示。当动力电池SOC≥SOC时,VCU向燃料电池发送关机指令,此时车辆运行在动力电池单独驱动的状态,当蓄电池降低到SOC以下,燃料电池重新开启。此时的功率平衡关系(以下所有为正值)为:

4)纯电运行能量回收模式,工作状态的能量流如图8所示。当纯电模式行驶车辆时,开启辅助制动或满足制动能量回收条件时,VCU向电机发送负扭矩将车辆的势能转换为电能,在动力电池可允许充电的电流范围内,对动力电池进行回馈充电。此时的功率平衡关系为:

5)氢燃料与动力电池共同驱动下,制动能量回收模式,工作状态的能量流如图7所示。为了减少对氢燃料电池寿命的影响,使燃料电池能够较平稳输出功率,在氢燃料电池正在给动力电池充电的情况下,可适当牺牲电机可回馈的电能。此时的功率平衡关系为:

4 结语
氢燃料车型控制的终极目标是燃料电池能够实现整车功率跟随,既能满足整车的动力需求,又能使动力系统的效率达最高,但现阶段氢燃料电池自身特性无法实现快速升降载,且单机功率还无法达到整车的需求,采用动力电池作为辅助的动力源,既能给整车提供辅助的动力,又能回收制动时电机产生的回馈能量和氢燃料电池降载过程无法释放的能量。完善的控制策略针对燃料电池的需求功率跟随电池SOC及整车实时需求功率进行变化,避免其出现功率频繁跳动,同时兼顾动力电池的充放电能力,在极端工况下对氢燃料电池及能量回馈的功率加以限制,在保证动力性及经济性的情况下,让整车稳定安全地运行。
猜你喜欢
消费电子(2022年7期)2022-10-31
汽车实用技术(2022年17期)2022-09-16
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年12期)2022-07-05
汽车实用技术(2022年5期)2022-04-02
汽车观察(2020年4期)2020-05-27
通信产业报(2019年33期)2019-11-04
汽车与安全(2019年3期)2019-06-21
汽车与安全(2019年12期)2019-05-14
