
基于机载 LiDAR 技术的典型水库水量变化估算
2022-08-26 08:59潘丽娟王冬梅任旭华石一凡
水利信息化 2022年4期
潘丽娟 ,王冬梅 ,任旭华 ,石一凡
(1.河海大学水利水电学院,江苏 南京 210098;2.江苏省水利科学研究院,江苏 南京 210017)
0 引言
在传统的河湖库容及周边地形测量研究中,水上研究主要依靠实地外业测量,水下研究多采用声呐等方法确定水深及水下地形,再根据相关 GIS 技术计算水文数据并生成库容曲线。然而,该方法受气象、地形地势等环境因素影响较大,且作业效率低,危险系数高,测量周期长,已无法满足河湖水量动态变化监测的需要。机载 LiDAR(激光雷达)测量是一种主动测量方式,不依赖自然光,具有受天气影响小、测量精度高、作业范围广、便携、人工野外作业量少等优势,在地形测量上有着广泛应用[1]。通过卫星、无人机等多种设备搭载 LiDAR 系统,在河湖枯水期开展周边区域的遥感地形调查,获取河湖及其周边区域的精细 DSM(数字地表模型)数据,再结合多期水位监测数据即可实现河湖水量的动态监测,可有效支撑河湖日常监管,减少人工工作量,提高工作效率,实现河湖的高效科学管理[2]。
当前机载 LiDAR 在河湖水位和水量计算上有所应用,但在水库区域应用较少[3]。目前江苏省已建成的大中型水库达 900 余座,水库在地区防洪抗旱及保障饮水安全中发挥着重要作用。因此,为更及时、便捷和准确地了解水库水量的变化,发挥水库区域对防洪抗旱的积极作用,以仑山水库为研究对象,使用机载 LiDAR 监测水库,利用 LiDAR 技术估算库区水量变化。
1 数据采集及研究方法
句容仑山水库是一座中型水库,位于江苏省镇江市,属山谷水库,水库水面无明显遮挡物,水域边界清晰,便于无人机飞行观测。观测期间该水库处于清淤阶段,水位较低,使用机载 LiDAR 能观测水库全貌,利于进一步进行数据处理分析。
1.1 数据采集
1.1.1 实验数据采集
于 2021 年 6 月 11 日进行点云数据采集实验,当天天气状况良好,水库水位为 48.7 m。无人机飞行 4 个架次,作业面积为 3.98 km2,获取有效点云数量 2 400 万个。无人机搭载 RIEGL miniVUX LiDAR 对实验区进行数据采集,LiDAR 模块具体参数如表1 所示。点云数据的质量受 LiDAR 模块参数的影响,根据实验区特点选取合适的分辨率及点云密度,有利于提高点云数据精度。

表1 LiDAR 模块参数
1.1.2 验证数据采集
为验证机载 LiDAR 数据精度,根据水库及周边的地形特征,选取水库边界区域进行实地高程采集。根据坝体、道路、草地等不同地形条件,在水库周边按不同地物类型选取 6 处区域采集高程,仑山水库卫星图像及地面实测高程点位置如图1 所示,12 个验证点地物类型分别为坝坡(序号 1 和 6)、滩涂(序号 2,5,8)、山坡(序号 3)、耕地(序号 4)、道路(序号 7,11,12)、桥面(序号 9 和 10)。
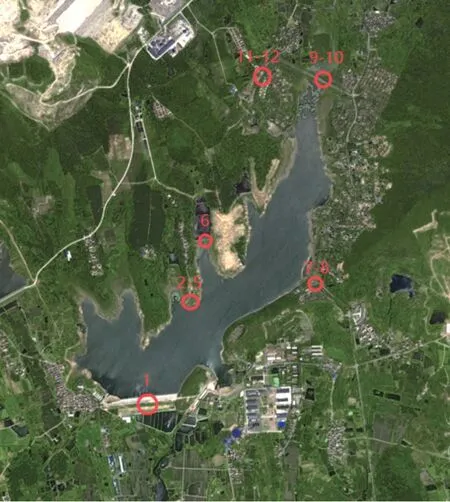
图1 水库地面实测高程点位置选取
本次外业测量仪器选用 Trimble R10 GNSS 智能接收机,利用 GPS RTK 勘测技术获得实验数据控制点坐标,测量坐标系统选用 2000 国家大地坐标系,高程系统为大地高系统。
1.2 研究方法
确定实验区后,对采集的原始点云数据做预处理,并进行滤波分类,构建不规则三角网(TIN),进而生成 TIN 的 DEM(数字高程模型),采用ArcGIS 软件提取栅格 DEM 中的面积及地形数据,对水库的水量变化进行估算。数据处理流程如图2所示。
2 点云数据处理
2.1 点云去噪
在机载 LiDAR 点云数据处理中,由于地面植被及建筑的影响,激光难以穿透障碍物到达地表,导致有的点位于真实地面,有的点位于植被或建筑物上,且机载 LiDAR 点云存在大量离散的粗差点,分布无规律,因此本研究采用 KD- 树自上而下的递归方式做空间划分及近邻搜索。设标准差倍数,对每个点搜索指定邻域点个数的相邻点,计算点到相邻点的距离平均值,如果距离平均值大于最大距离,则判定为噪点并去除[4-5],点云去噪流程如图3 所示。
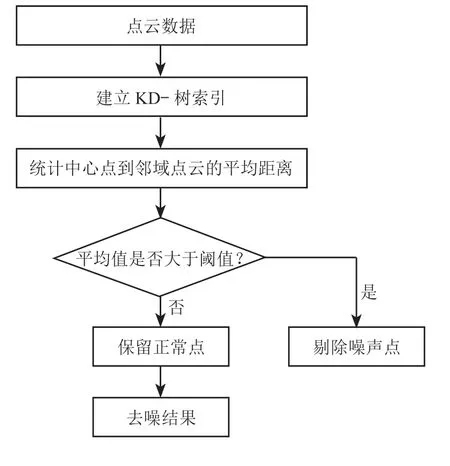
图3 基于 KD- 树的点云去噪流程图
2.2 点云滤波
点云滤波是指在激光扫描的点云数据中,提取精确的地面点,进而得到 DEM 的过程。本研究选择渐进加密不规则三角网(PTIND)滤波算法[6-7],首先获取地面种子点,然后对这些地面种子点建立 TIN 并进行迭代加密。在每次迭代过程中,都对其余各点到所在三角形的反复角和距离进行阈值判断,将满足条件的点加入 TIN。迭代过程一直持续到没有点可以再加入 TIN 为止,具体流程如图4 所示。

图4 基于 PTIND 的点云滤波流程图
2.3 地面点数据插值
DEM 是一种简单的数字地貌模型,可通过有限的地形高程数据实现对地面地形的数字化模拟。本研究利用 TIN 插值法建立库区的 DEM,即基于矢量的数字地理数据,在点集区域内构成一系列有限个锐角或近似等边的三角形(尽量避免过大钝角或过小锐角),三角形的形状和大小取决于点集的密度和位置,各三角形最终连接形成一个三角网拟合地表面[8]。
2.4 水量计算
本研究中水量计算利用积分原理,将像元中心连接到三角形中,再对每个三角形进行检查以确定其对面积和体积的影响,根据水平参考平面的高度,累计参考平面下方至待测表面之间的体积,即可得出总水量。
本次实验利用 ArcGIS 中的 Surface Volume 模块,导入 DEM 栅格数据,设置不同的参考平面,累计参考平面至模型外表面的体积,得出水库随水位增长引起的水量增长值及水量差值变化量曲线图。但由于机载 LiDAR 不能穿透水面到达水底,因此仅计算当日水位以上的水量。而传统水库水量估算方法多采用棱台体积公式:

式中:ΔV为库容变化量;S1,S2分别为水深H1和H2处的水库水面面积。
这种计算方法原理简单,计算简便快捷,但由于未考虑水库底面坡度变化,计算水量差值会引入误差。
3 结果与讨论
3.1 数据处理结果
首先基于 KD- 树实现点云去噪,点云去噪前后对比图如图5 所示。由图5 a 和 b 得出仑山水库区噪声点主要集中在水体表面及水下极低点:由于水面漂浮物及库区北部存在大量水草,因此产生大量高于水面的噪声点;由于机载 LiDAR 无法穿透至水底,因此水下产生大量极低点。采用 KD- 树算法去噪,设置标准差倍数为 5 倍,选取的邻域点个数为 10 个,可去除大部分噪声点(图5 c),总体效果较好。对于航迹带边界及有大量水草存在的水面,仍有噪声点残留,经人工辅助去除后满足后续处理要求(图5 d)。
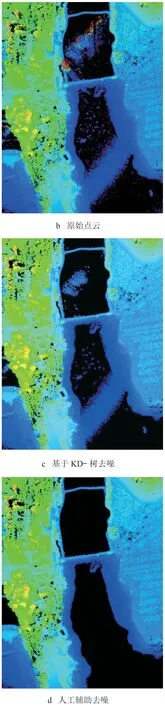
图5 仑山水库北部典型区域降噪前后对比图

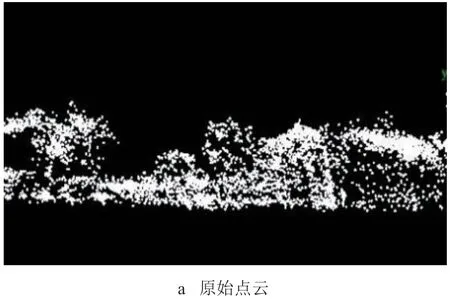
利用 PTIND 滤波算法分离出地面点和非地面点,迭代角度为 8°,迭代距离为 1.4 m。对于不同的地形条件,滤波效果均有差异,3 种不同地形条件下的滤波效果图(图中橙色点为地面点,白色点为非地面点)分析如下:河滩、居民区和道路等平坦地形的滤波效果图如图6 所示,分类效果较好;存在密集植被的山林地区的滤波效果图如图7 所示,机载 LiDAR 受植被遮蔽影响无法全部穿透到达地面,分离得到的地面点较少,难以与地物点自动分离;对于有人工建筑物的地区,如桥体、屋顶等,如图8所示,出现系统误分。因此需要结合人工的方法,分离部分特殊地区的地面点,滤波效果如图7 c 和 8 c 所示。
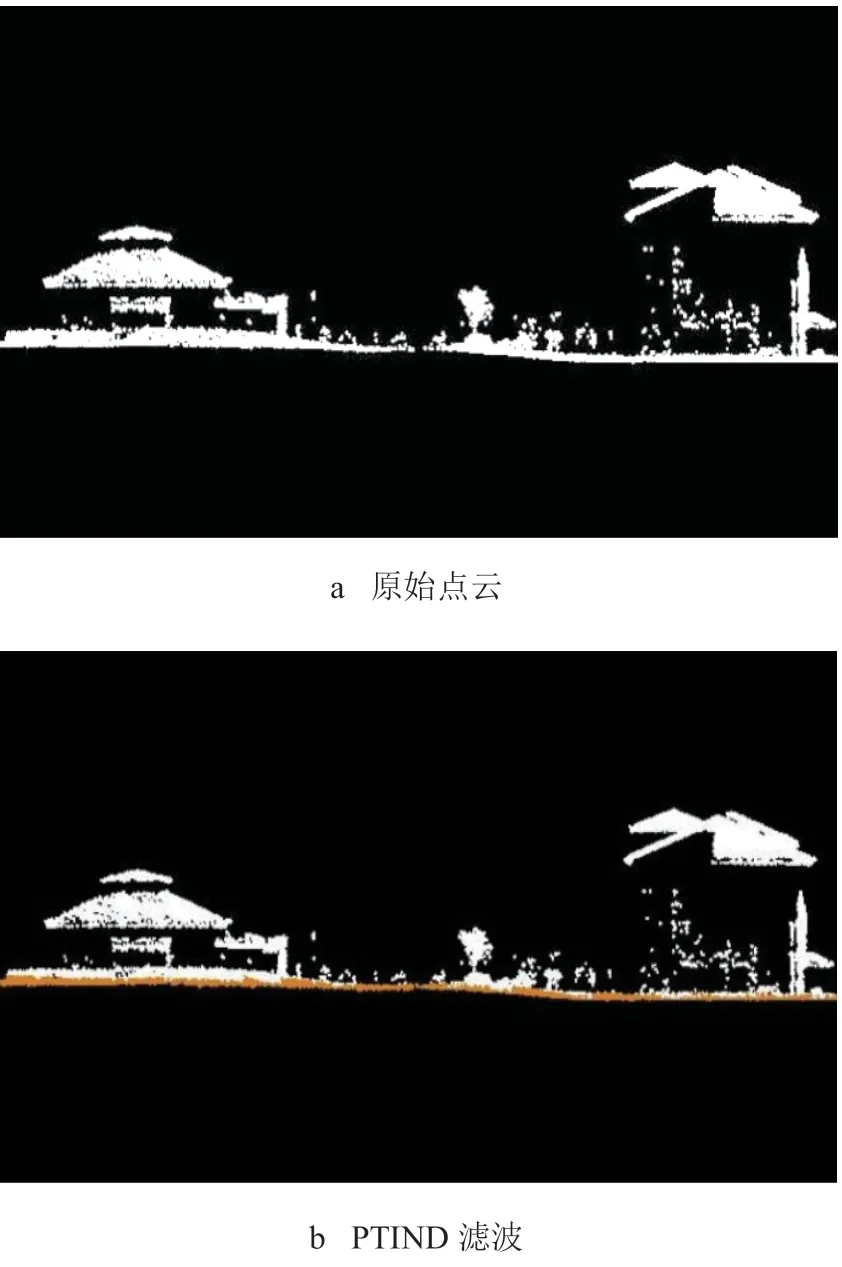
图6 仑山水库南部河滩居民区滤波前后对比图

图7 林地剖面滤波前后对比图
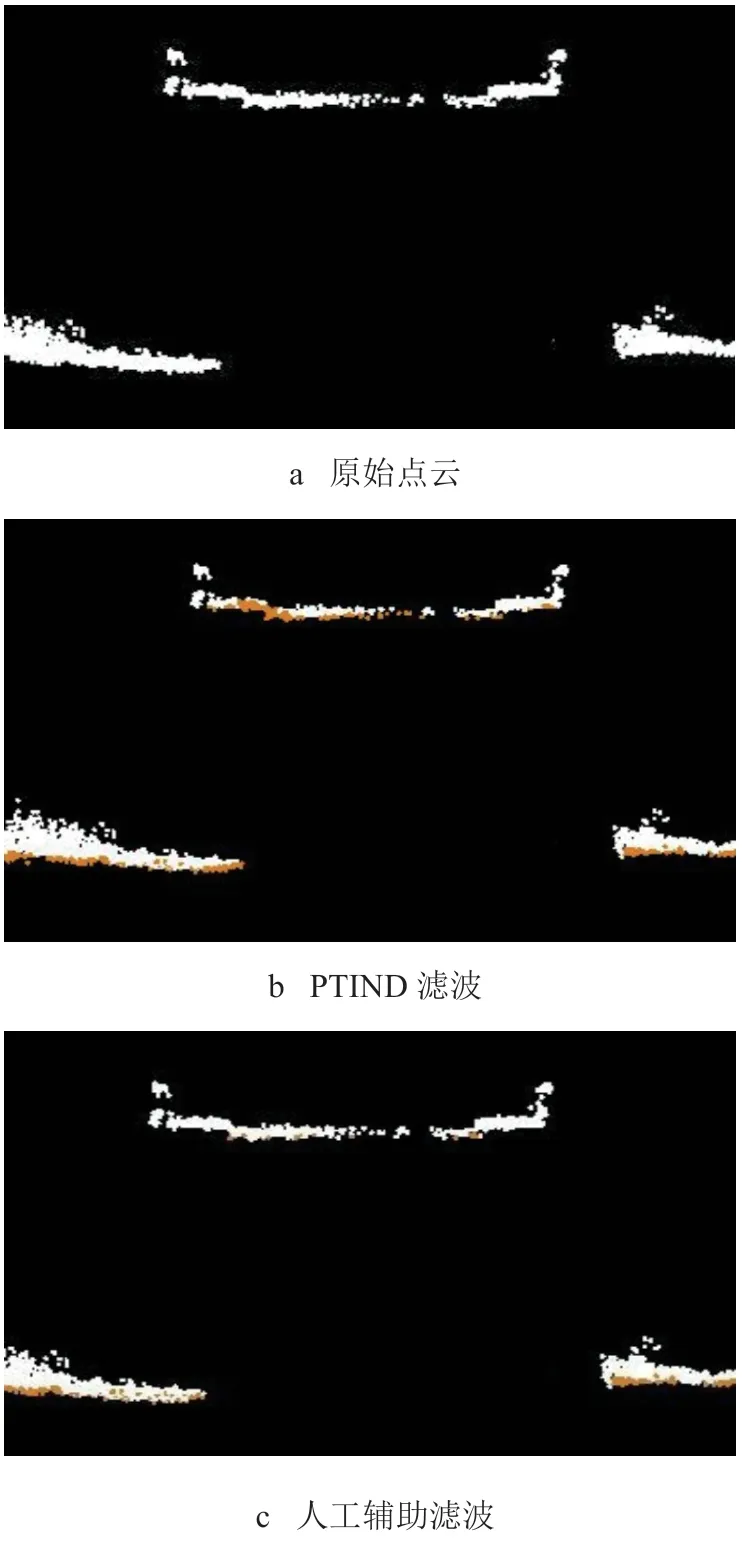
图8 桥面坡面滤波前后对比图
3.2 DEM 精度验证
为验证 DEM 是否满足精度要求,采集水库周边不同区域的高程,计算误差大小,12 个验证点的实测和点云高程及误差如表2 所示。表中高程误差分析如下:耕地和滩涂地区高程误差较大,这是由于存在农作物和大量水草,机载 LiDAR 受水草遮蔽影响,且由于人为活动,实地高程发生变化,从而产生误差;道路和山坡地区高程误差较小,这是由于道路和山坡的遮蔽物较少,且短期内高程受人为因素影响较小,高程稳定。

表2 测点测量和点云高程
根据表2 成果得出:除个别验证点的误差绝对值超过 0.200 m 外,其他验证点的误差绝对值均小于0.200 m,低于 GH/T 8024—2011《机载激光雷达数据获取技术规范》[9]要求的误差范围(± 0.33 m),机载 LiDAR 点云符合精度要求。
3.3 面积及水量变化曲线
本研究点云密度为 20 个/m2,在实际应用中发现,在水面至高程 51 m 部分的滩地点云密度较低,难以提取连续的轮廓,因此本研究仅分析 51~58 m水位的水库面积和水量变化。
对比机载 LiDAR 估算得出的水库面积与面积参考值,对比图如图9 所示,机载 LiDAR 估算的水域面积范围为 2.12~3.90 km2,水库面积参考值取自《江苏省水利工程管理手册》[10],面积范围为 2.0~4.1 km2。在高于 52 m 部分,基于机载 LiDAR 估算的水域面积小于参考值,差值范围为 0.01~0.46 km2。面积计算值总体偏小,且在 54 m 以后差值较大,主要是因为该参考值为 1958 年水库建设时面积设计值,数据年代较为久远,且水库受人为建筑影响(西北部及东部新建住宅,北部新建桥梁,副坝修缮加高等),导致面积缩减。

图9 各水位水库面积曲线图
对比 LiDAR 估算水量与式(1)计算得到的参考水量,对比图如图10 所示,LiDAR 估算的水量变化范围为(97.09~172.50)万 m3,根据式(1)计算所得参考水量变化范围为(97.24~185.73)万 m³。在水位 52 m 后,基于 LiDAR 估算的水量均小于式(1)计算的参考水量,差值范围为(0.15~24.95)万 m³,原因可能是积分计算对地形坡度变化更为敏感,而式(1)的计算方法受坡度变化影响较小,且水库边界受人为建筑物影响,与水库建立初期相比坡度更大,更稳定,使得在水位 52 m 后基于 LiDAR 估算的水量逐渐小于由式(1)计算的参考水量,水量变化也更为稳定。

图10 各水位水量变化曲线图
4 结语
本研究利用机载 LiDAR 技术,建立了仑山水库精细化三维地形数据,精确地估算出水库水量差值,机载 LiDAR 估算的水量值小于传统估算方法得到的水量值,可为监测水库水量变化提供科学依据。机载 LiDAR 技术在小型复杂水库的水量估算中有较好的应用前景,对调节控制水库及保证防洪安全具有重要意义。
受水库边界人工建筑物影响,局部边界坡度较大,提取边界点云数据时,可能会造成边界数据缺失;对接近水面的低水位处,由于点云密度较低,建立数字高程模型时,容易形成大面积空洞,导致误差。因此,在后续研究中需要提高点云密度,结合现场考察及其他无人机技术提高点云分类和提取精度。
猜你喜欢
节能与环保(2022年3期)2022-04-26
资源信息与工程(2021年5期)2022-01-15
海洋石油(2021年3期)2021-11-05
当代陕西(2020年23期)2021-01-07
空间科学学报(2020年3期)2020-07-24
电子制作(2018年16期)2018-09-26
消费导刊(2017年8期)2018-01-18
山东工业技术(2016年15期)2016-12-01
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
