皮带自移机尾电液控制系统设计
2022-08-23 01:42闫建伟
机械工程与自动化 2022年4期
刘 震,李 洋,闫建伟
(宁夏天地奔牛实业集团有限公司,宁夏 石嘴山 753001)
0 引言
皮带自移机尾是综采工作面的重要输送设备,在煤炭开采过程中承担着顺槽转载机与皮带输送机的衔接,其可靠性及其操作的便利性直接影响井下运输的畅通性和高效性。由于煤矿井下环境条件复杂,皮带自移机尾在向前推进过程中自身工况参数的采集比较困难,使得难以对其进行自动化精确控制。
随着综采技术的不断发展,煤矿智能化建设要求实现煤矿开采、运输、通风、安全保障、经营管理等过程的智能化运行,基本实现采掘工作面无人(少人)操作、煤矿重点岗位机器人作业,井下固定岗位无人值守与远程监控,各系统智能化决策和自动化协同运行。煤矿智能化建设改造,推动煤矿装备向智能化、高端化发展,对顺槽转运装备在远程控制、自动化协同运行(联动)等方面提出了明确的要求。为此,本文设计了一套皮带自移机尾电液控制系统,可有效采集自移机尾的工况参数,实现自移机尾的手动控制、自动控制、遥控控制以及联动控制。
1 皮带自移机尾结构及工作原理
皮带自移机尾主要由机身、小车以及液压系统三部分构成,其中小车与转载机相连可在机身轨道上滑动,机身滚筒环绕输送皮带与皮带输送机相连,液压系统是自移机尾的动力单元。皮带自移机尾结构示意图如图1所示。
自移机尾的所有动作执行和姿态的调整都是由液压系统通过控制各个油缸的伸缩来实现的。液压系统可以通过控制机头、尾的4组调平油缸的伸缩来控制机身的升降和水平方向的姿态,通过控制分布于机身左、右两侧的2台推移油缸的伸缩来控制自移机尾的前移,通过控制分布于机头、尾滑靴内侧移油缸的伸缩来控制机身的左、右移动和机头、尾的摆角。
2 自移机尾的功能需求
为了满足煤矿智能化建设的需求,自移机尾除了应具备基本的控制功能外,还需要实现以下智能化、自动化方面的功能:
(1) 自移机尾的抬高、侧移、推移、调平和调偏等手动控制功能。
(2) 自移机尾的自动推移、自动调平、自动调偏和自动调直等自动控制功能。
(3) 自移机尾的遥控控制和远程控制功能。
(4) 自移机尾工况参数的监测和上传功能。
(5) 自移机尾与顺槽转运设备之间的联动控制功能。

1-抬高架;2-机头架;3-调平油缸;4-推移油缸;5-小车;6-导轨;7-中间架;8-机尾架;9-侧移油缸;10-滑靴图1 皮带自移机尾结构示意图
3 自移机尾电液控制系统设计
根据皮带自移机尾的功能需求,设计了电液控制系统,其组成框图如图2所示。该系统以本安型控制器为核心,配备位移传感器、倾角传感器、胶带跑偏开关、行程开关等多种传感器进行相应数据采集,通过比例电磁阀组控制相应油缸动作,实现皮带自移机尾的抬高、侧移、推移、调平和调偏等姿态调整动作,辅以遥控模式和远程集控模式,实现皮带自移机尾的遥控控制和远程控制。
3.1 矿用本安型控制器设计
控制器是整个系统的核心所在,其具备丰富的输入、输出接口,包括数字量、模拟量等输入接口,开关量输出接口,以及RS485、CAN总线、以太网等通讯接口。数字量和模拟量接口用来接入传感器,实时采集传感器数据,监测自移机尾工况状态。通讯接口与遥控单元、远程集控中心或第三方控制相连接,接收外来控制指令或对外传输数据。开关量输出接口与执行单元连接,用来发出控制指令。控制器在工作状态下应根据得到的机身工况数据,同时结合来至遥控、本身操作面板以及集控中心的控制命令,按照既定的逻辑算法,发出控制指令控制油缸动作,实现自移机尾的手动、自动、遥控和远程等控制。
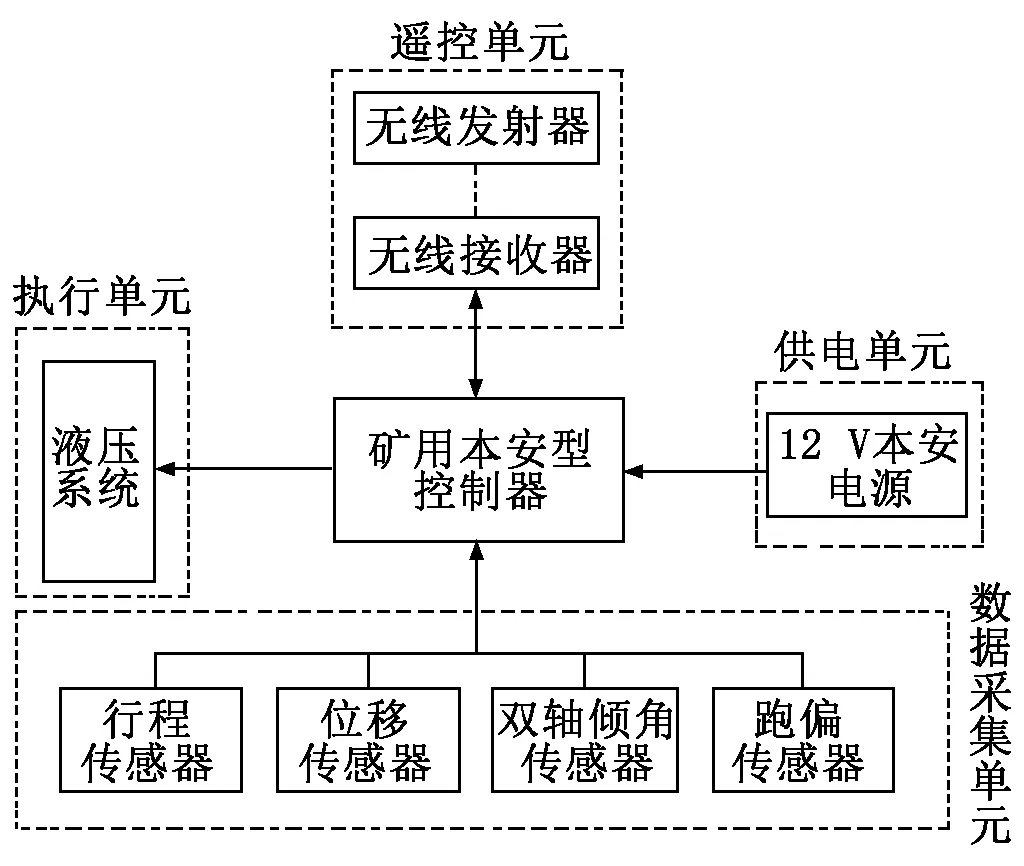
图2 电液控制系统组成框图
3.2 数据采集单元设计
为了能够准确地得到自移机尾的状态参数,本系统中使用了位移传感器、双轴倾角传感器、行程开关以及跑偏传感器。位移传感器为磁致伸缩传感器,共有7组,分别内置于自移机尾的4组抬高油缸、2组侧移油缸、1组推移油缸内,用于检测油缸的位移值;双轴倾角传感器有1个,安装于机身中间架处,用于检测机身的倾斜角度;跑偏传感器对称安装于皮带自移机尾机头的左、右两侧,用于检测输送带的跑偏量;行程开关安装在小车导轨的起点和终点处,用于检测推移油缸伸、缩到位的信号。
3.3 执行单元设计
自移机尾电液控制系统的执行单元为液压控制系统,其是皮带自移机尾实现推移、调高、调偏等功能的基础。
自移机尾液压系统包括1个自动反冲洗过滤器、1个16功能电磁换向阀、6个安全阀、12个液压油缸以及液压油管等附件。自动反冲洗过滤器用来过滤系统油液中的杂质,保护系统内其他元器件的安全;液压油缸包括调平油缸、侧移油缸、推移油缸和调角油缸,分别用于自移机尾的调平、侧移、推移和机头抬高架的角度控制;电磁换向阀与控制的输出接口相连,接收控制器的控制信号控制相应油路的通断;安全阀为液压单向阀和溢流阀两者的组合阀,既用来保证机架维持所要求的状态,而不至于导致机架在自重压力下自行下落,又用于保护调平回路,防止发生超压现象,保证系统和液压油缸的安全。
3.4 遥控单元设计
遥控单元包括手持便携式无线遥控发射器和无线接收器。无线接收器安装于控制器附近,通过通讯线与控制器连接,通讯方式为RS485。遥控发射器按键数量及功能与控制器相匹配。遥控单元控制优先级低于控制器本地控制优先级, 即控制系统处于控制器本地控制状态时,遥控器发出的控制指令无效,且控制系统处于遥控状态时,控制器本地控制随时可以中断遥控控制拿回控制权。
4 结束语
本文设计了一种用于皮带自移机尾的电液控制系统,其是以控制器为核心,建立了包含位移、行程、倾角、跑偏、流量传感器的数据采集单元,包含发射器和接收器的遥控单元,以及包含液压系统的执行单元,实现了自移机尾自身工况参数的精确采集和自移机尾的机身升降、推移、侧移、调平、调偏功能的本地控制、自动控制、遥控控制及远程控制。本控制系统提高了自移机尾控制的自动化和智能化控制水平,促进综采工作面整体智能化水平的提升。
猜你喜欢
山东煤炭科技(2021年4期)2021-05-13
科学与财富(2021年35期)2021-05-10
昆钢科技(2021年1期)2021-04-13
启迪与智慧·上旬刊(2019年5期)2019-09-10
作文·初中版(2019年8期)2019-09-09
中国新技术新产品(2016年21期)2016-12-08
科技与企业(2015年18期)2015-10-21
汽车零部件(2014年5期)2014-11-11
筑路机械与施工机械化(2014年3期)2014-03-01