基于无人机倾斜摄影的数字露头实景三维模型构建*
2022-08-18 08:44:00陈建华曹礼刚王炳乾
地质科学 2022年3期
刘 帅 陈建华 王 峰 曹礼刚 王炳乾
(1.成都理工大学地球物理学院 成都 610059;2.成都理工大学沉积地质研究院 成都 610059)
地质露头作为揭示地质活动、地壳变动以及岩层分布的重要地质对象,一直是各类地质研究的重中之重(万剑华等,2019a)。多年来,野外地质露头数据采集方式几乎没有发生过改变,主要以相机拍照、人工测量,再辅以一些必要的样本采集为主(印森林等,2018)。经过多年实践,此方法逐渐暴露出其存在的一些局限性,主要有以下一些方面:1)数据采集不全面;其采集的全面程度主要取决于剖面所处的地理环境,部分剖面所处位置人力无法到达,数据不能进行采集,如陡坡、悬崖等位置(闫博等,2020)。2)数据采集局部化,难以建立整体概念;研究区内通常出露多个剖面,传统地质露头数据采集通常单独进行各剖面间数据采集和踏勘,导致本应有关联性的各露头之间,人为切断了联系,造成后续地质分析和解释难度加大,甚至引起错误。3)数据复用性差;人工踏勘采集的数据通常只有到过剖面现场的人熟悉该数据,若将数据转交给一个未到过剖面现场的人,数据理解较为困难,导致部分数据不能再次使用,复用性差。4)数据可展示性差;人工踏勘采集的露头数据标准不统一,且局部化,无法做到从整体上全面展示剖面现状,只能“以点代面”的进行展示。5)数据采集周期长;传统数据采集主要依靠人工,但野外人工踏勘每天考察量是极其有限的,特别是在某些远离人烟的无人区。6)数据采集危险性高;部分剖面所处位置地理条件差,如戈壁,悬崖,陡坡等,需要承担一定的考察风险,现场踏勘人员甚至可能需要面临生命危险(贾曙光等,2018)。
近年来,无人机技术得到了快速发展,无人机设备愈发普及,小型化、精细化等诸多优点使得其在与其他行业相结合时,得到了广泛好评(曲林等,2015)。基于无人机的倾斜摄影技术及随之而来的三维自动建模技术在此期间也得到长足发展,基于无人机倾斜影像的快速三维建模已成为测绘领域的一项新技术(史文中等,2004;弥永宏等,2017)。部分地质工作者也注意到无人机技术的优势,开始将无人机技术应用于地质行业,应用方向主要集中在遥感地质、地质灾害应急监测、地质信息识别与提取等方面(Giordan et al.,2020;连会青等,2020;戴均豪等,2021;印森林等,2021)。数字露头实景三维模型方面的研究还相对较少。
鉴于此,本文将无人机倾斜摄影技术应用于地质露头数据采集,进行基于无人机倾斜摄影的数字露头实景三维模型构建。基于构建的数字露头实景三维模型,地质工作者可进行量测、分析等多类别的地质踏勘分析,且数据复用性得到增强,只需一次数据采集,即可复刻下剖面所有真实地质情况。将无人机倾斜摄影技术引入到野外地质工作中,在解决传统地质露头考察和数据采集局限性的同时,能够进一步提高地质工作数字化程度。
1 研究方法
1.1 倾斜摄影技术
倾斜摄影技术是国际摄影测量领域近十几年发展起来的一项高新技术,该技术通过从1 个垂直、4 个倾斜、5 个不同的视角同步采集影像,获取到丰富的地面目标顶面及侧视的高分辨率纹理(周晓波等,2017)。它不仅能够真实地反映地物情况,高精度地获取物方纹理信息,还可通过先进的定位、融合、建模等技术,生成真实的三维地物模型(熊强等,2018)。该技术在欧美等发达国家已经广泛应用于智慧管理、规划、住建、自然资源、交通、电力、水利、应急等行业(Zhou et al.,2021)。
倾斜摄影技术多与无人机技术相结合,以无人机作为倾斜摄影系统的搭载平台,可最大程度发挥倾斜摄影数据采集优势。无人驾驶飞机简称“无人机”(Unmanned Aerial Vehicle,UAV),是利用无线电遥控设备和自身携带的飞行控制装置操纵的不载人飞行器(Zhou and Zhang,2020)。依据其升力产生方式,通常将其分为固定翼无人机和旋翼无人机两类(万剑华等,2019b)。固定翼无人机飞行速度快、飞行高度高,携带摄影镜头后可进行长距离、大面积地面目标拍摄,但起飞条件较为苛刻。旋翼无人机通常体积更小更易于携带,且操作简单,此外,其可悬停进行地面目标拍摄,由于多以锂电池作为动力源,所以滞空时间相对较短。结合地质行业野外工作实际情况,旋翼无人机通常是更好的选择。
基于无人机的倾斜摄影一般使用机载五镜头或两镜头摄影系统,得益于算法原理的进步,现通过单镜头也能进行倾斜摄影数据采集(盛辉等,2020)。采取单镜头采集方案时,镜头固定一个方向,设定密集航线,“井”字交叉飞行。单镜头的采集方案通常在保证数据质量的情况下,成本更低。
倾斜摄影生成模型的精度一般为正射影像分辨率的2~3 倍,即垂直视角所采集的照片分辨率的2~3 倍(郑盼,2018)。正射影像成像分辨率有公式(1)所对应的比例关系,a为像元尺寸,GSD为地面分辨率,f为镜头焦距,H为摄影系统航高(即飞行高度),由此可推断出特定分辨率下的飞行高度H应为公式(2)所示。

1.2 技术路线及工作流程
基于无人机倾斜摄影的数字露头实景三维模型构建的技术路线如图1 所示,依托该技术路线的实际工作流程主要分为两个部分。第一部分,地质露头倾斜摄影数据采集。第二部分,基于倾斜摄影数据的实景三维模型构建。

图1 基于无人机倾斜摄影的数字露头实景三维模型构建技术路线Fig.1 Technical route for constructing digital outcrop real scene 3D model based on drone tilt photography
(1)倾斜摄影数据采集
数据采集的质量直接关系着后续模型建立的难易程度及精度。结合地质工作实际情况,将无人机野外数据采集方式分为航线自动飞行数据采集和人工手动飞行数据采集两类。
航线自动飞行数据采集方式所获取数据质量高、影像重叠度均一。该方式缺点也很明显,由于要制定飞行范围的KML 文件,所以需提前了解剖面情况,特别是剖面较为精准的位置范围。该方式有以下6 个步骤:1)露头区域KML 制作;使用无人机配套飞行软件或部分桌面端软件将剖面区域圈定出来制作成KML 文件。2)无人机组装及测试;按要求组装好无人机,并进行简单的飞行测试,检查飞机控制及各项参数是否正常。3)飞行航线制定;通过无人机配套的飞控软件和KML 文件制定航线,重点是设定剖面采集过程中的倾斜摄影相关参数,包括飞行高度、飞行速度、旁向重叠率、航向重叠率。飞行高度根据拟建立模型的精度进行确定,飞行速度不易过快,过快易导致照片模糊,航向重叠率和旁向重叠率分别为80%和75%。4)航线任务执行;无人机根据航线自动巡航并同步采集剖面倾斜影像和对应GPS 坐标信息。5)空地信息互传;飞行过程中,无人机实时与遥控器进行图传,通过遥控器屏幕可实时查看当前无人机各类飞行状态参数及拍摄的剖面影像。6)返航与数据质量检查;飞行任务完成后,无人机自动或手动返航,检查拍摄数据是否覆盖整个剖面区域,检查照片是否清晰无模糊,若照片有问题,需进行补拍。
人工手动飞行数据采集方式所获取数据分辨率通常高于自动采集方式,且获取较为灵活,不需提前了解剖面范围及制作KML 文件。该方式的缺点是影像重叠度较难控制,给后续的三维重建带来困难。该方式有以下4个步骤:1)无人机组装及测试;2)剖面数据采集;沿剖面手动飞行并进行数据采集,采集过程中应注意,飞机高度适当高一些,使镜头与剖面保持不超过40 度夹角,每两张照片重叠度不低于70%;3)空地信息互传;4)数据质量检查。
(2)实景三维模型构建
实景三维模型构建主要依赖于倾斜摄影模型建立原理进行三维重建。主要有以下6个步骤:区域整体平差、空中三角测量、多视角影像密集匹配、三维TIN 格网构建、白体三维模型创建、纹理映射。
基于无人机倾斜摄影的数字露头实景三维模型构建实际工作流程如图2 所示。

图2 基于无人机倾斜摄影的数字露头实景三维模型构建工作流程Fig.2 The workflow of constructing digital outcrop real-scene 3D model based on drone tilt photography
2 实例分析
2.1 研究区概况
鄂尔多斯盆地位于中国中西部地区,囊括陕、甘、宁、蒙、晋五省,为中国第二大沉积盆地,发育丰富的地质现象(付金华等,2021)。实验选取位于鄂尔多斯盆地西缘的陕西平凉二道沟剖面和宁夏中卫大石头井沟剖面进行基于无人机倾斜摄影的数字露头实景三维模型构建。研究区位置如图3 所示。

图3 研究区位置图Fig.3 Location map of the study area
2.2 数据采集
实验对宁夏中卫大石头井沟地质剖面采取无人机自动飞行的数据采集方式,划定的航线区域和航线如图4 所示。数据采集时设置的倾斜摄影行高为50 m,航相重叠率和旁向重叠率分别为80%和75%。此外,对部分重点区域进行了人工手动精细化拍摄,以提高重点区域模型精度。无人机共飞行1 小时28 分钟,采集到2 654 张相片,覆盖整个大石头井沟地质剖面。

图4 大石头井沟剖面航线规划图Fig.4 Route planning diagram of Dashitoujinggou section
实验对平凉二道沟地质剖面采取人工手动飞行的数据采集方式。人工采集时,尽量控制倾斜摄影高度为主体区域20 m,部分区域30 m,影像重叠度不低于70%。拍摄时长约为1 h,共获取到1 663 张相片,覆盖整个平凉二道沟地质剖面。采集时的无人机航迹如图5 所示,采集到的倾斜影像如图6a 与图6b 所示。

图5 二道沟地质剖面航迹图Fig.5 Track map of Erdaogou geological section

图6 二道沟采集数据示例a.示例影像1;b.示例影像2Fig.6 Example of Erdaogou collected data
2.3 数字露头三维模型构建
利用采集到的倾斜摄影数据进行对应地质剖面实景三维模型构建。构建过程中的4个主要阶段分别如图7~图10 所示(以平凉二道沟剖面为例)。构建完成后的平凉二道沟剖面和宁夏中卫大石头井沟剖面分别如图10、图11 所示。
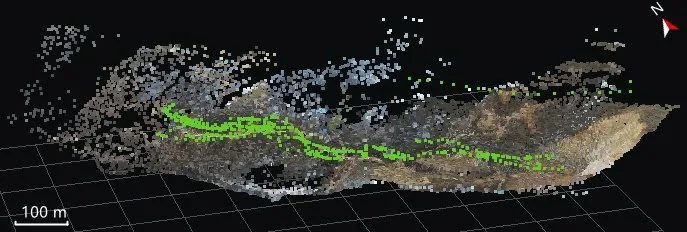
图7 空三模型阶段Fig.7 Empty three model stage

图10 二道沟数字露头实景三维模型Fig.10 Digital outcropping real three-dimensional model of Erdaogou

图11 大石头井沟数字露头实景三维模型Fig.11 Digital outcrop real 3D model of Dashitou Jinggou
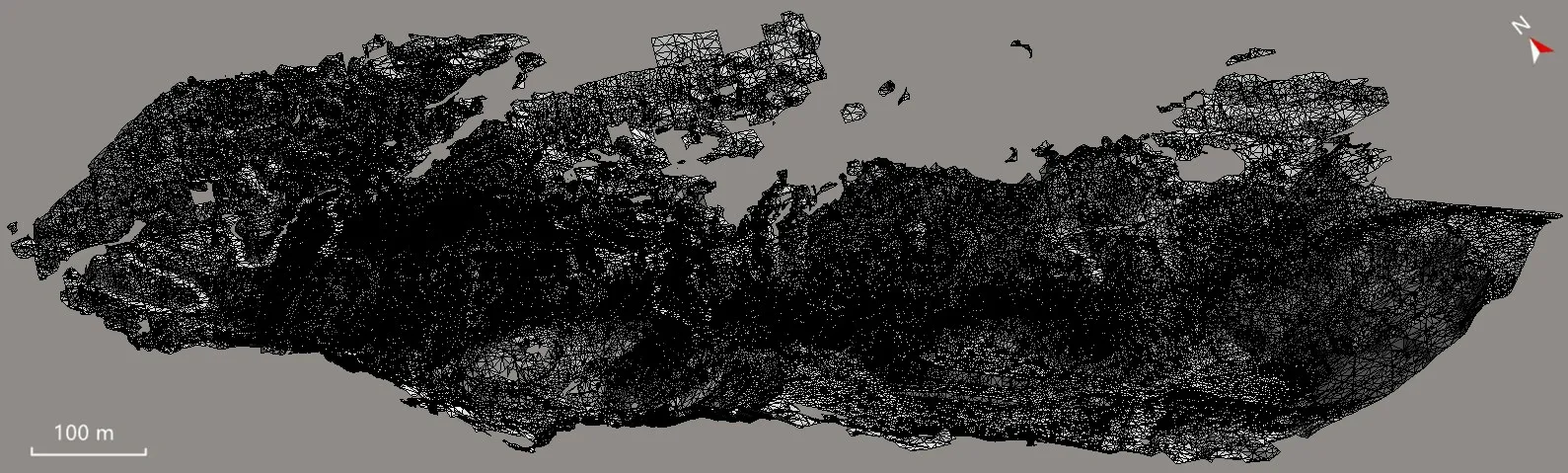
图8 TIN 格网模型阶段Fig.8 TIN grid model stage
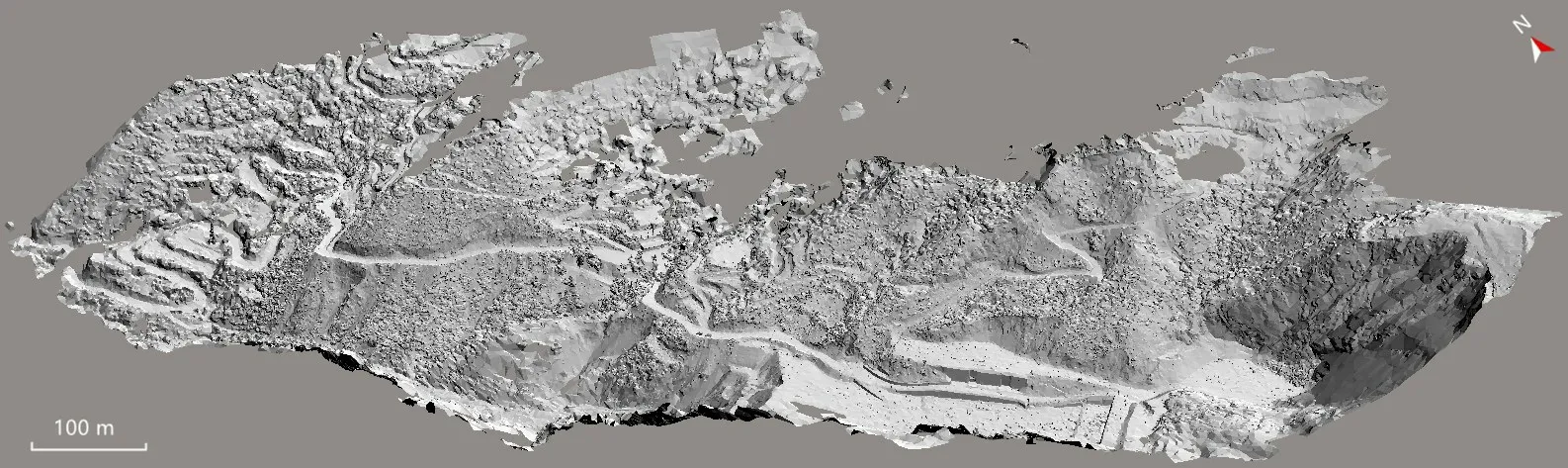
图9 白体模型阶段Fig.9 White body model stage
2.4 剖面踏勘与分析
基于构建的数字露头实景三维模型,研究人员可进行量测、踏勘等多种地质考察和分析工作。文章此处仅做简单分析,不进行深入地质解释。
模型精度和分辨率均为厘米级,从模型上即可判断出大部分岩层岩性,特别是对于人力不易到达处的岩性分析判别。如从上述建立的二道沟剖面实景三维模型(图10)中判断出图12 位置A 为砂岩,B 为粉砂岩,且A 处紫红色砂岩夹紫红色泥岩分布,结合数字露头剖面量测功能(图15),可知此处,最厚处砂岩岩层厚3.19 m,薄层砂岩厚度从7~50 cm 不等,夹层中的泥岩层普遍较薄,厚度从10~60 cm 均存在。
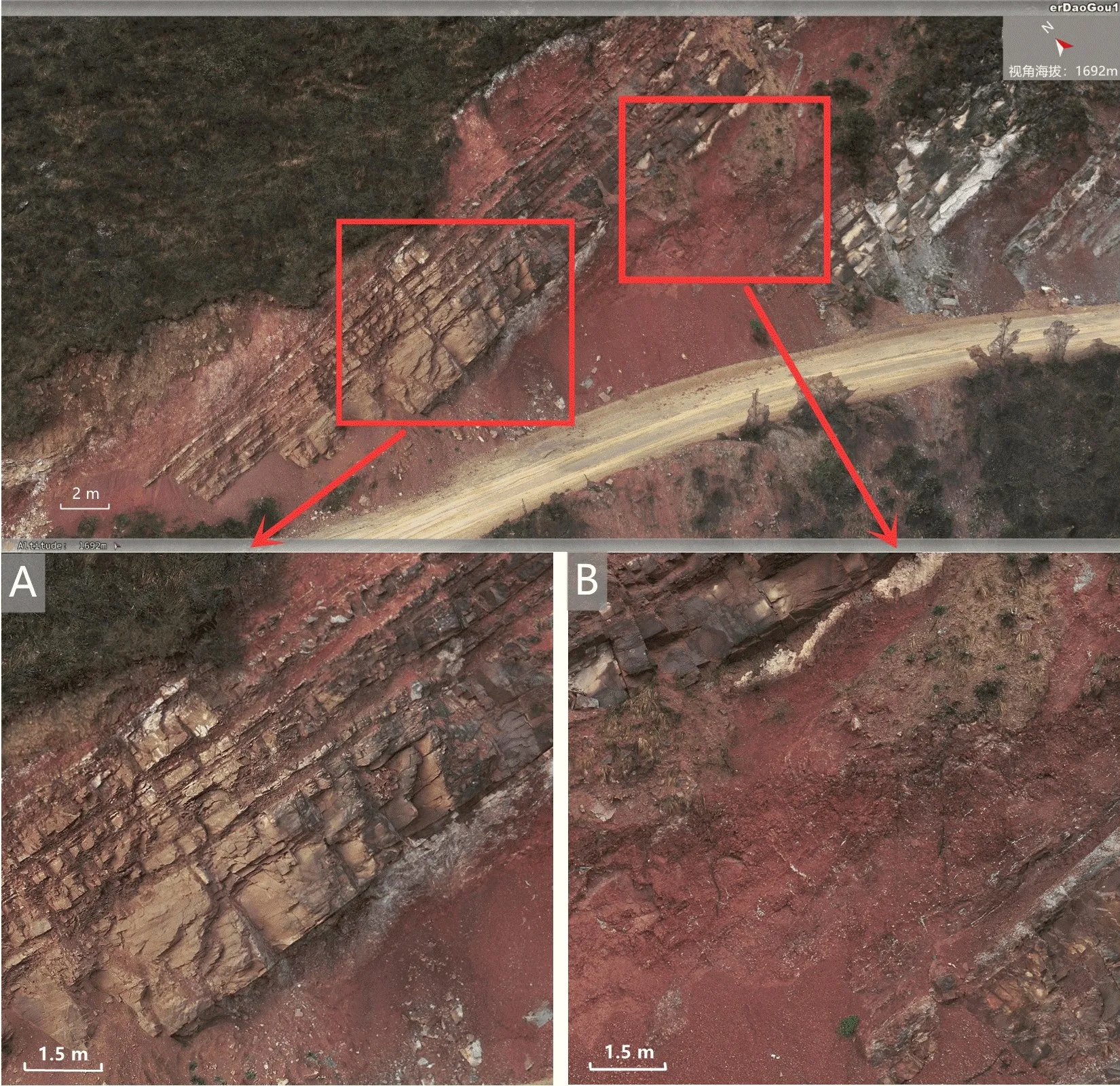
图12 岩层岩性分析示例Fig.12 Rock formation lithology analysis example

图15 岩层厚度量测示例1Fig.15 Rock thickness measurement example 1
模型具有整体宏观性,从模型上容易判断出岩层走向和叠覆情况。如从上述建立的大石头井沟剖面实景三维模型(图11)判断出图13 位置处岩层走向呈南北向,西侧广泛分布灰白色石英砂岩,东侧分布褐紫色、灰绿色杂色泥岩夹薄层钙质粉砂岩。结合数字露头剖面量测功能(图16),可知西侧石英砂岩厚度普遍在5~10 m,属中厚层石英砂岩,东侧岩层厚度普遍小于1 m,为薄岩层。图13 框线勾绘处为两种岩层岩性分界线,结合剖面整体岩层分布情况以及细节处岩性分析情况(图14),再加上剖面所处地理位置以及其他一些辅助资料,推断图13 框线勾绘处为臭牛沟组与前黑山组分界线,分界线以西为臭牛沟组灰白色中厚层石英砂岩,以东为前黑山组褐紫色、灰绿色杂色泥岩夹薄层钙质粉砂岩。上覆地层为臭牛沟组,下伏地层为前黑山组。
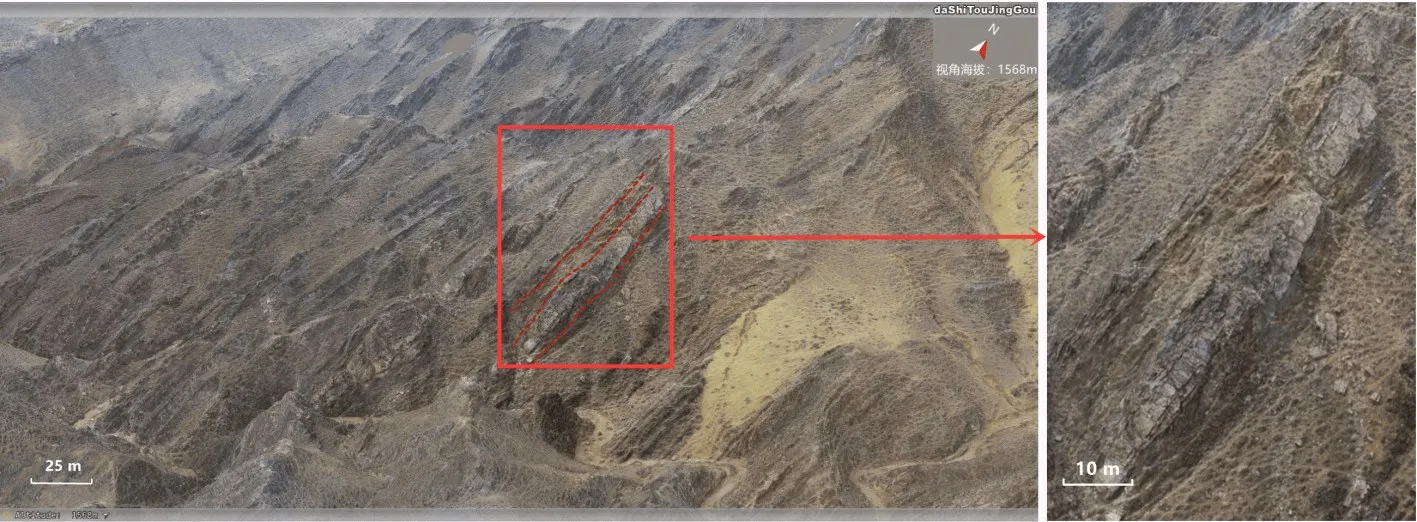
图13 宏观岩层走向和叠覆情况分析示例Fig.13 Macroscopic strata strike and overlay analysis example

图14 细节岩层走向和叠覆情况分析示例Fig.14 Examples of detailed rock strata strike and overlay analysis

图16 岩层厚度量测示例2Fig.16 Rock thickness measurement example 2
模型为真实三维模型,从模型上可对岩层厚度和距离等进行量测,特别是对于人力不易到达处的量测。量测时只需先点击起点再点击终点即可,距离(厚度)的产生是基于两点间真实空间坐标,误差极小,使用简单。
3 讨 论
通过对鄂尔多斯盆地西缘二道沟剖面和大石头井沟剖面进行基于无人机倾斜摄影的数字露头实景三维模型构建,发现与传统地质露头数据采集和野外踏勘方式相比,利用无人机进行地质露头倾斜摄影数据采集,然后构建数字露头实景三维模型,基于模型进行剖面踏勘和地质分析具有以下一些传统方法所不具备的优势。
(1)数据采集的全面程度得到了提升。避免了传统方法由于人力无法到达或没有到达而采集不全面,进而导致后续分析解释易片面化和局部化的问题。
(2)数据采集的整体精度得到了提升。传统方法采集到的数据系统性差异很大,部分由人工相机拍摄和丈量的区域精度很高(毫米级),但大部分区域精度很低(米级及以上),由此造成整个剖面数据系统性差异大,而基于实景三维模型的资料获取和踏勘,精度处于厘米级,且几乎不存在系统性差异。
(3)数据复用性和可展示性得到了提升。对剖面的一次数据采集所构建出的数字露头实景三维模型可多次使用,不再需要一个剖面反复踏勘和分析。此外,构建出的实景模型是真实剖面的三维复刻,故能克服露头地质体本身是三维,但传统方法只能将其考察为不规则二维剖面的问题。
(4)基于实景三维模型,可快速进行如岩层岩性分析、岩层走向和叠覆情况分析等多类别地质分析。特别是,模型具有整体宏观性,使得研究尺度和目光可以拉高到剖面整体,不再只聚焦在传统方法所关注的“局部点”上。
(5)数据采集周期明显缩短。大部分剖面均能在一天内完成采集,相较于传统人工踏勘采集方法,效率得到明显提升。
(6)数据采集和踏勘风险明显降低。剖面倾斜摄影数据采集主要由无人机从空中进行,不再需要地质工作者“爬山涉水”,后续的剖面分析和踏勘则在室内从实景模型上进行,相较于传统方法,大大降低了野外工作风险。
此方法也存在一些局限性,主要有两个方面。其一,数据采集质量受天气影响,理想的采集天气是无云的晴天,雨、雾和多霾天气会直接影响倾斜摄影数据的质量,从而间接影响剖面实景模型的清晰度和分辨率。其二,数字露头实景三维模型尽管存在诸多优势,但仍不能完全代替人工现场踏勘。模型精度和分辨率与无人机所搭载的镜头高度相关,通常情况下,模型精度可达厘米级,但对于部分需要更加精细分析的场景仍显力不从心,如中粒砂岩和细粒砂岩的分辨。
4 结 论
论文结合实例研究了基于无人机倾斜摄影的数字露头实景三维模型构建方法。将无人机倾斜摄影应用于数字露头实景三维模型构建,进行地质剖面数字化,可在克服传统地质露头数据采集和踏勘局限性的基础上,凭借其高清晰、高精度、大范围的优势全面感知地质剖面复杂场景。通过高效的无人机数据采集和简单明了的数据处理流程生成的数字露头实景三维模型完美重现了真实剖面情况。基于构建的实景三维模型,可进行剖面量测、岩层岩性分析、岩层走向分析、岩层叠覆情况分析等多种地质分析和踏勘。相较于传统地质露头数据采集和野外踏勘,基于实景三维模型的分析更具优势,其在保证踏勘精度的前提下,大大减少剖面数据采集和踏勘工作量,提高了踏勘效率,减少了踏勘风险,并可分析到人力无法到达或没有到达的区域,还能从宏观上整体进行分析,避免了分析的片面化和局部化,数据复用性也得到了增强,是一种帮助地质工作者高效进行地质分析的先进技术。
猜你喜欢
疯狂英语·读写版(2023年12期)2023-02-20 18:41:06
江苏安全生产(2022年5期)2022-06-16 07:51:04
商品与质量(2021年43期)2022-01-18 05:28:30
华人时刊(2021年23期)2021-03-08 09:27:24
——工程地质勘察中,一种做交叉剖面的新方法
中国设备工程(2021年2期)2021-01-28 07:51:10
少儿美术(快乐历史地理)(2020年2期)2020-06-22 08:18:30
电子测试(2017年12期)2017-12-18 06:35:46
北方音乐(2017年4期)2017-05-04 03:40:09
北京航空航天大学学报(2016年6期)2016-11-16 01:50:44
河南科技(2014年22期)2014-02-27 14:18:11