
轻微型无人机活塞发动机测控与建模方法
2022-08-17 07:27郑育行唐庆如安斯奇陈思成
内燃机工程 2022年4期
郑育行,唐庆如,安斯奇,陈思成
(中国民用航空飞行学院航空工程学院,广汉 618307)
0 概述
随着无人机(unmanned aerial vehicle,UAV)在军事作战、民用物流、地形测绘、农业防护、应急救援等领域的大量应用[1–5],用户对现代无人机提出了更高可靠性、更高续航性、更高稳定性的要求;而国家绿色发展理念的不断深入更对无人机类民用航空器提出了低污染性的要求。目前常用的无人机动力分为内燃机与纯电力驱动两种[6]。前者可以满足高续航性的要求,但是易造成环境污染;后者受现代电池技术发展的限制,无法满足高续航性要求。油电混动无人机既可以满足低污染性的要求,又可以弥补纯电动无人机电池动力不足的缺陷,具有较高的商用价值,相关领域的研究成为热点[7]。
为深入研究油电混动无人机的动力性能与经济性能,必须精确直接地采集到油电混动无人机动力装置的运行试验数据,并对试验数据进行处理研究。传统的发动机研究方法基于人工在坐标纸上绘制特性曲线,工作量大,且难以保证数据的精度。部分研究者使用其他研究者的数据通过分段插值的方法对数据进行拟合得到发动机部分工况下的特性曲线,既不能保证数据的真实性,也不能得到较为平滑的特性拟合曲线[8–9]。此外,传统的试验台研究对象大多为中大型发动机,所采用的研究方法不适用于轻微型无人机活塞发动机,测得的试验数据结果也难以表征轻微型活塞发动机动力装置的特性[10]。
本文中以一款适用于油电混动无人机的轻微型活塞发动机为研究对象,设计了一套轻微型无人机活塞发动机测控试验台。并基于此试验台采集了活塞发动机在不同转矩下的工况参数,如转速、功率、燃油消耗率、排气温度等。通过试验采集到的参数建立基于试验数据的发动机三维万有特性曲面并进一步得到较为平滑的万有特性曲线,对前人的试验进行了补充。本测控试验台可为提高油电混动无人机经济性及优化油电混动无人机设计提供可靠依据。
此外,本文中通过实验建模法获得了该型发动机稳态与动态数值模型,将模型结果与试验结果进行了对比,验证了建模方法的可行性。最后以所研究的轻微型无人机活塞发动机为主动力装置,将其应用到串联式油电混动系统中,在MATLAB/Simulink 中建立了串联式油电混动无人机动力系统稳态模型。
1 活塞发动机测控试验台总体设计方案
1.1 发动机试验台测控系统实现方式
测控系统基于小型化油器式甲醇燃料活塞发动机开发,可测量收集的参数有:油门开度、发动机转速、发动机转矩、发动机轴功率、发动机燃油流量、发动机排气温度。通过测量以上参数可以实时监测发动机工作状态,表1 为该测控系统所涉及的传感器型号类型。

表1 传感器类型
测控系统的主要功能是采集轻微型无人机活塞发动机在不同工况下的转速、转矩、功率、燃油消耗率、发动机排气温度等基础数据,用以分析发动机速度特性、负荷特性、万有特性等工作特性。轻微型无人机活塞发动机测控系统硬件框图如图1所示。
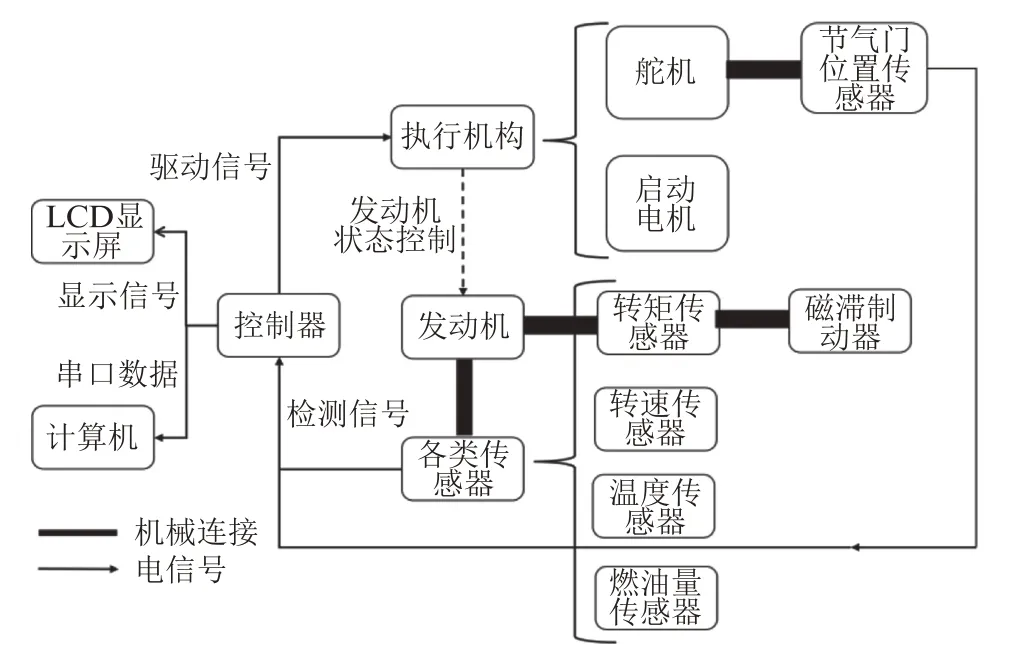
图1 轻微型无人机活塞发动机测控系统硬件框图
1.2 发动机实时数据采集方法
将KTR11—10 型位移传感器与控制发动机油门的伺服舵机搭配使用,通过读取油门控制拉杆位移计算油门开度百分比,采用闭环控制实现对油门开度的稳定控制。
使用U 型槽光电感应转速传感器测量发动机叶片转速。发动机工作时,其同轴安装的散热风扇叶片会遮挡光电门,由此产生脉冲信号,通过采集两个脉冲信号的时间差,经数据处理可计算出发动机转速。由于发动机转速波动较大,故使用两个U 型槽光电感应转速传感器分别置于发动机叶片两侧测量转速平均值以提升精度。
发动机转矩、有效轴功率用DYN—200 动态转矩传感器实时测量。将动态转矩传感器安装在发动机和磁滞制动器之间,动态转矩传感器通过离合器与发动机连接在一起,制动器通过刚性联轴器与动态转矩传感器相连,并固定在可调节台架上。试验台架主体部分结构如图2 所示。发动机起动后调节磁滞制动器的负载,发动机实时输出的转矩与功率发生变化,动态转矩传感器将采集到的数据模拟信号通过转矩传感器信号输出线传至控制器,再从控制器传至计算机,通过计算机串口即可实时读取发动机转矩与轴功率数据。
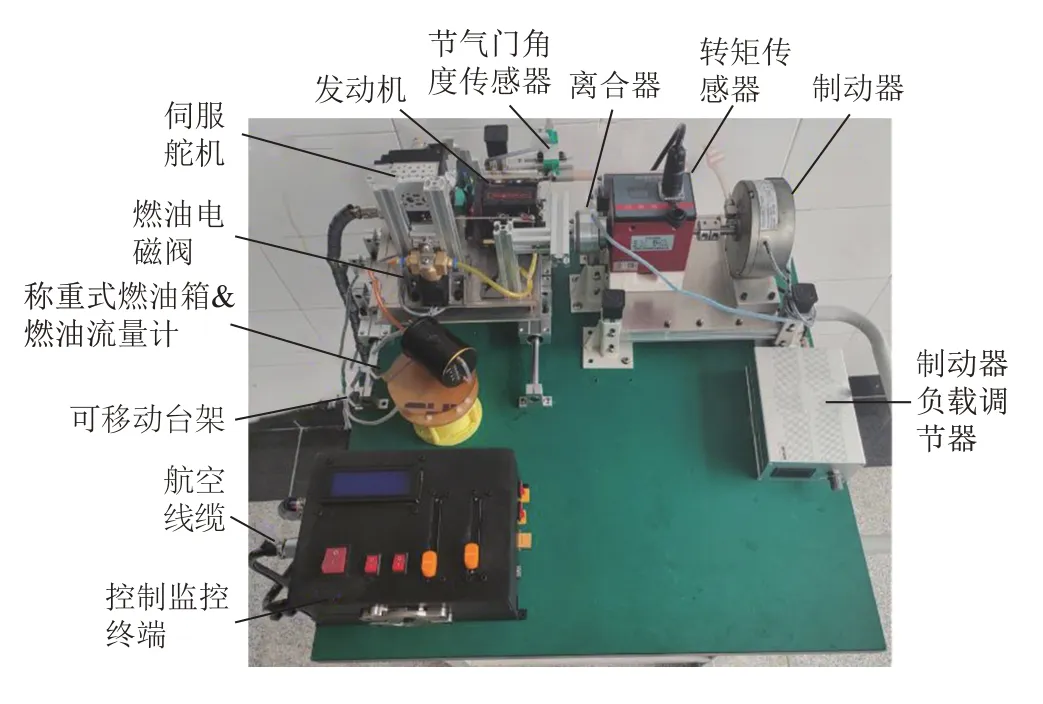
图2 试验台主体部分结构示意图
通过高精度HX711 模块搭配称重压力传感器自制可存储式燃油流量测量装置,用来测量发动机燃油流量。该装置可实现自动测量发动机某一工况下单位时间内燃油流量,通过计算该工况下平均功率可进一步得到发动机固定工况下的燃油消耗率。图3 为HX711 模块数据输入、输出通道和增益选择时序图,图中DOUT 为串口数据输出,PD_SCK 为串口时钟输入,Ti(i=1,2,3,4)为脉冲时间。
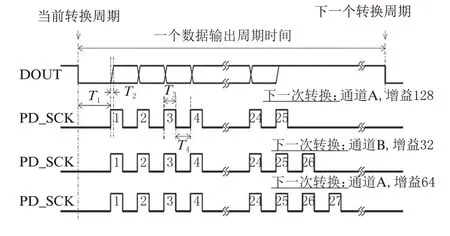
图3 数据输入、输出通道和增益选择时序图
发动机排气温度测量使用MAX6675 K 型热电偶温度传感器采集数据,将热电偶的模拟信号转化为数字信号,然后通过单片机处理转换成温度值。在模拟信号转换成数字信号中需要用到MAX6675时序,MAX6675 时序图如图4 所示。图中-----CS 表示串口数据输入,SCK 表示串口时钟,S0 表示数据输出。如图4 所示,当-----CS 从高电平变为低电平后,数据开始新的转换,在SCK 时钟的下降沿触发下S0开始向外输出之前已经转化的数据。可用数据为D14~D3 共12 位数据,对应数据范围为[0,4 095],其对应的测温范围为[0.00 ℃,1 023.75 ℃]。此外由于需要采集的发动机排气管较小,故采集发动机排气温度参数时将针型传感器插入发动机排气管内测量。
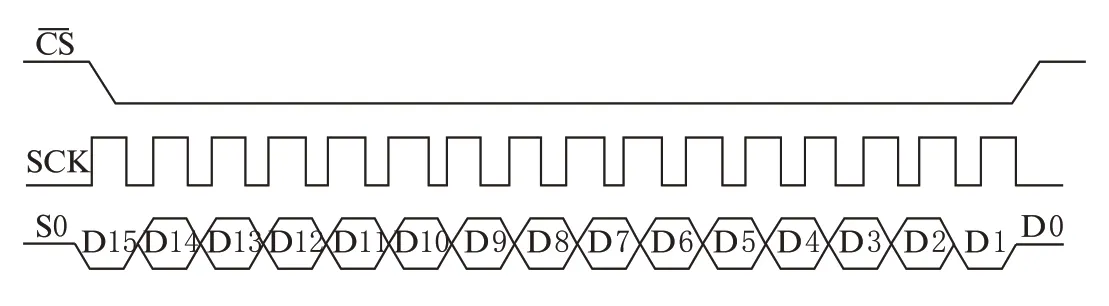
图4 MAX6675 时序图
数据采集流程如图5 所示。

图5 数据采集流程
本文中所搭建的轻微型无人机活塞发动机试验台能够通过对现有油电混合动力系统试验台的简单拆装改造搭建。将图2 所示的试验台中的磁滞制动器拆下更换为微型永磁无刷电机,并在试验台中添加推力螺旋桨、升力螺旋桨、整流稳压模块、电压传感器和电流传感器等传感器,就可以实现油电混合动力无人机动力系统试验台的搭建。油电混合动力无人机动力系统试验台如图6 所示,该试验台不仅可以采集到发动机的特性数据,还能够采集螺旋桨推力、转速、电功率及发电电流、电压、发电效率等一系列数据,能够为进一步优化混动无人机动力系统经济性提供可靠依据。

图6 油电混合动力无人机动力系统试验台
1.3 发动机试验台架测试校验
基于上文测控系统与数据采集方法,设计搭建了活塞发动机测控试验台,通过试验对台架进行校验。本次试验采集的对象是小型化油器式甲醇燃料活塞发动机,试验场地外部环境温度10 ℃,环境压力100 kPa,海拔高度为450 m。采集的参数为多组发动机在同一转矩情况下不同转速所对应的功率与燃油消耗率。因发动机功率级别较小,为了图示的美观明了,本文中将发动机燃油消耗率单位处理为g/(W·h)。采集到的部分数据经过处理,示于表2。
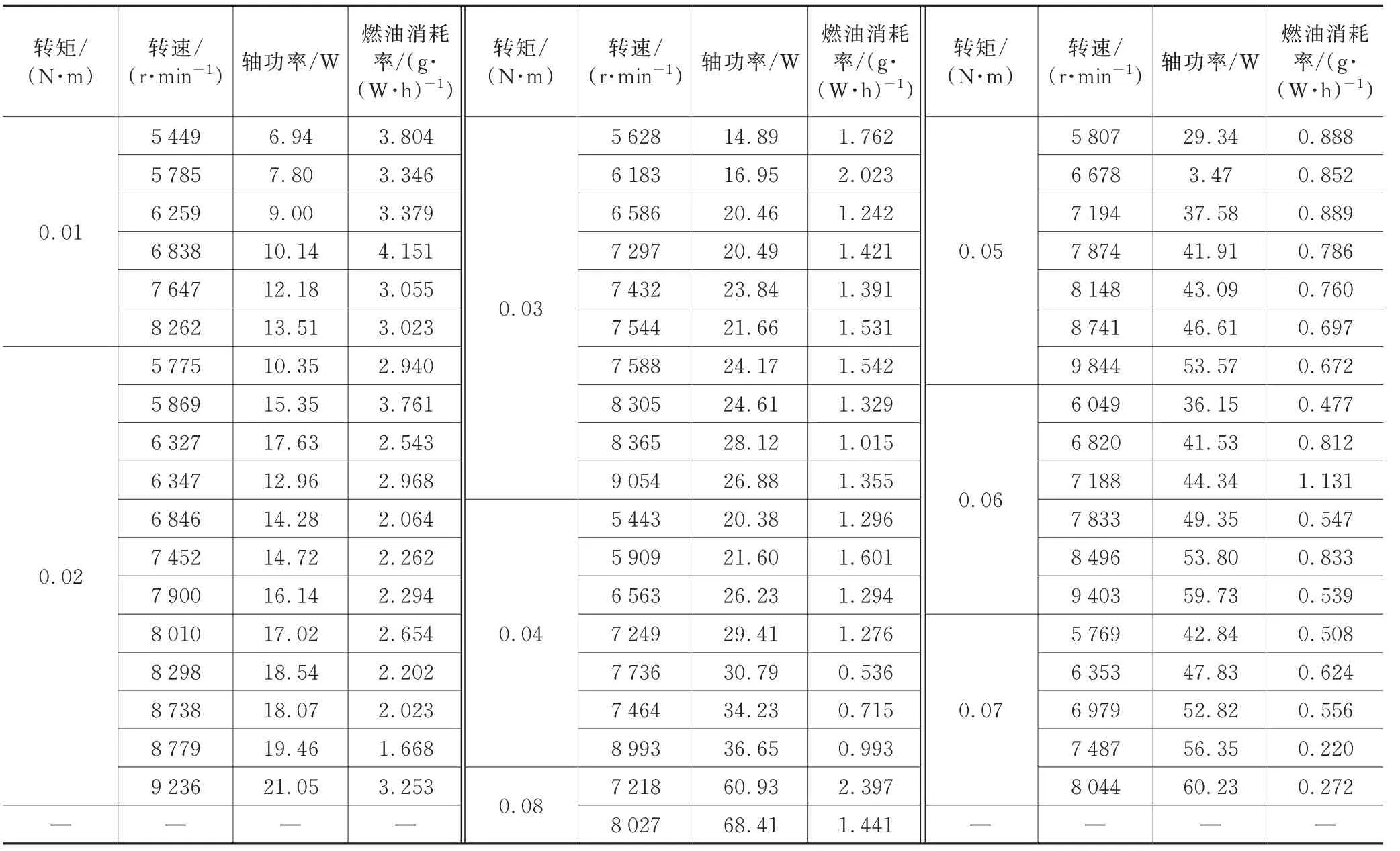
表2 多个转矩情况下不同转速所对应的功率与燃油消耗率
将得到的数据使用MTALAB 中的meshgrid函数划分平面网格[11],基于查表法从该发动机的万有特性曲线中取得发动机5 000 r/min、6 000 r/min、7 000 r/min、8 000 r/min、9 000 r/min 下不同转矩对应的功率与燃油消耗率等特性数据,再将这些数据与试验台采集到的发动机实际工作情况下的特性数据进行对比,对比结果如图7~图11 所示。由试验数据和拟合数据可计算出试验台误差,误差计算公式见式(1)。
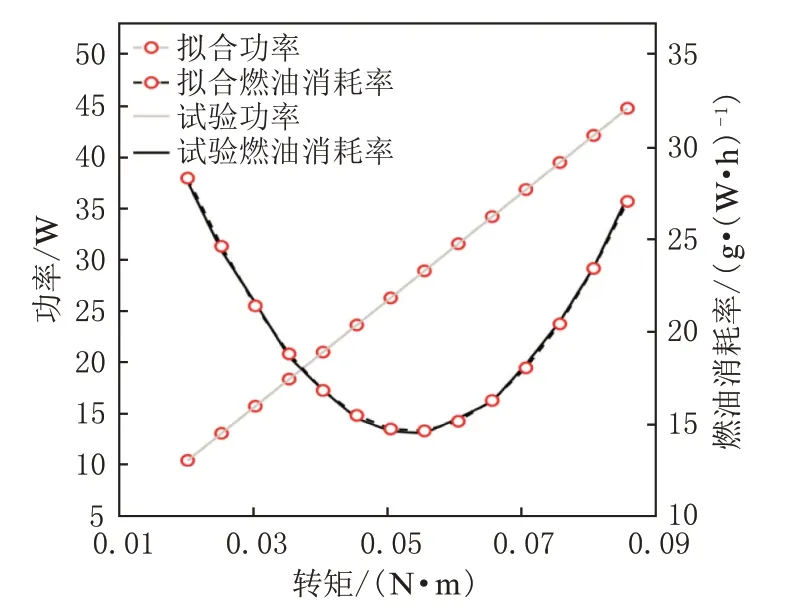
图7 转速5 000 r/min 下拟合与试验数据对比
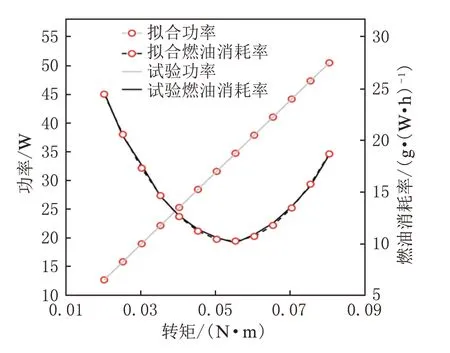
图8 转速6 000 r/min 下拟合与试验数据对比
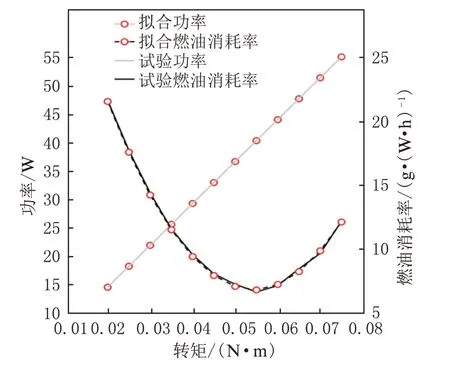
图9 转速7 000 r/min 下拟合与试验数据对比
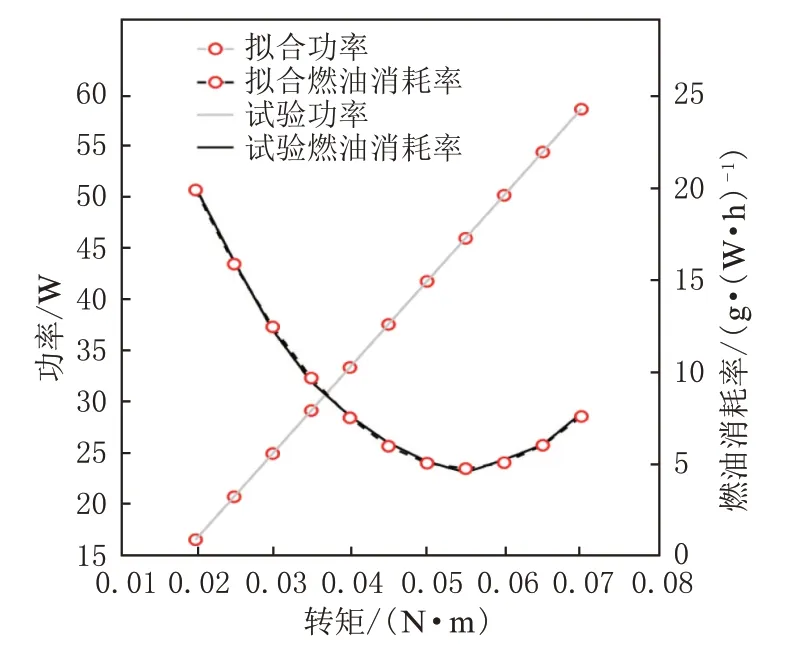
图10 转速8 000 r/min 下拟合与试验数据对比
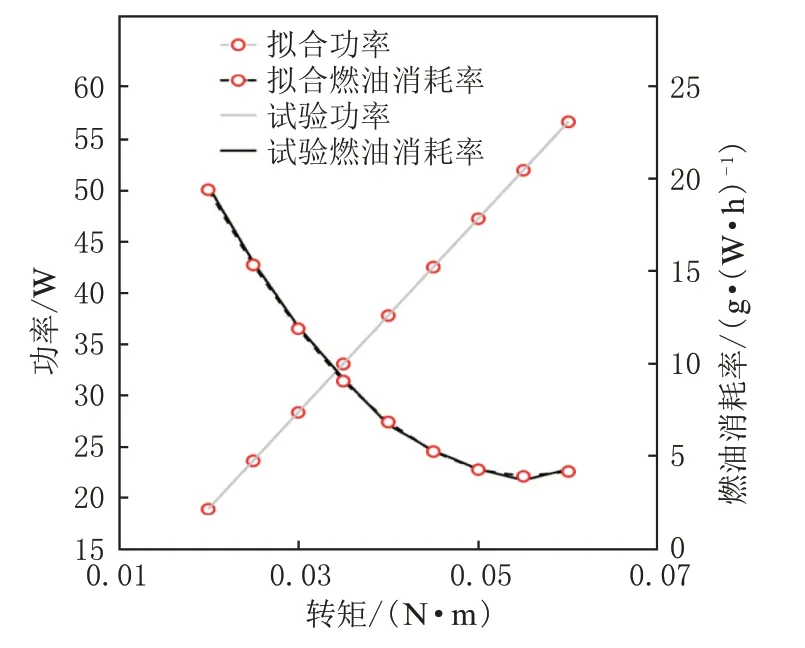
图11 转速9 000 r/min 下拟合与试验数据对比

式中,er为试验台相对误差;xe为试验数据;xm为拟合数据。经过计算试验最大相对误差为5%。
对比各图可以看出,发动机在各转速下曲线的趋势大致相同,且试验台在试验过程中数据参数采集正常,采集到的转矩与功率与该发动机型号相匹配。这表明该测控系统运行可靠,搭建的试验台可以精确实时地采集到发动机各工况下的数据参数。在发动机全转速范围内功率与燃油消耗率的拟合数据与试验数据基本吻合,表明本试验台所得到的数据能够满足轻微型活塞发动机数据采集与测控要求,基于试验数据建立的发动机模型能够较好地表征该发动机。
2 发动机稳态模型建立
2.1 发动机三维模型的建立
为了更好地寻找轻微型无人机活塞发动机的工作高效区间,需要绘制出此类发动机的万有特性曲线。发动机的万有特性曲线是表征发动机转速、转矩、功率、燃油消耗率之间相互关系的多参数曲线[12]。为了得到更高精度、更直观的发动机万有特性曲线,首先需要采集发动机在不同工况下的数据参数。本研究中使用前文提及的轻微型活塞发动机测控试验台采集到的60 组数据,再利用MATLAB将采集到的数据进行拟合处理,进一步使用三维绘图功能绘制出发动机的三维等燃油消耗模型和三维等功率模型,最后使用三维投影的方法得到发动机的万有特性曲线。
2.1.1 三维等燃油消耗曲面模型建立
为了获得发动机的万有特性曲线,需要先拟合出发动机的等燃油消耗曲线模型。可以将发动机的燃油消耗率S看作转速N和转矩T的函数,即:

依据多元线性回归理论[13],建立发动机燃油消耗率的回归模型,如式(3)所示。

式(3)可表示为矩阵形式,如式(4)所示。

式中,[S1S2…Sn]T为多个试验点的燃油消耗率构成的矩阵;[a0a1…ak-1]T为该模型的待定系数;[e0e1…en]T为该模型的残差;n为试验点的个数;l为多项式的最高次幂;k为该多项式的系数,k=(l+1)(l+2)/2。在MATLAB 中进行多项式拟合时,理论上系数矩阵的最高次幂l越大就能越好地实现拟合,然而l越大,多项式函数出现病态的概率就越大,因此根据文献[12]选取l=2 作为最高次幂对多项式做最小二乘拟合。
拟合时,在程序中指定x轴坐标参数为发动机转速,y轴坐标参数为转矩,z轴坐标参数为发动机燃油消耗率。在拟合数据时,不同的目标矩阵维数会影响拟合得到的结果范围,因此,程序中所设置的目标矩阵维数m不能过大,维数设置过大时得到的拟合矩阵会超过发动机实际工作区间,造成拟合不精确。本文中设置矩阵维数m=120,通过拟合得到的轻微型无人机活塞发动机的三维等燃油消耗率曲面模型如图12 所示。
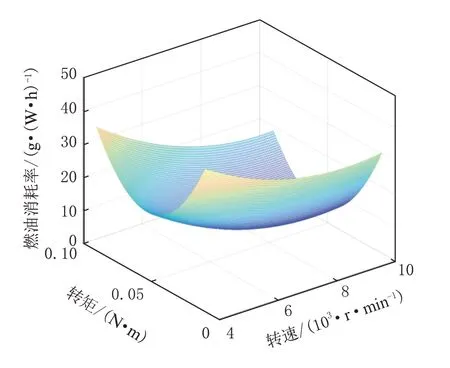
图12 等燃油消耗率曲面模型
2.1.2 三维等功率曲面模型建立
万有特性曲线是包含等燃油消耗率曲线和等功率曲线的二维平面图,通过三维模型投影得到万有特性曲线,还需要建立等功率曲面模型。转矩、转速、功率三者的关系式如式(5)所示。

可得到发动机的功率P是转矩T、转速N的函数,因此可得到功率P的函数表达式,如式(6)所示。

依照式(3)构建的发动机燃油消耗率回归模型,建立出发动机功率回归模型,如式(7)所示。
基于式(7)所示的回归模型,建立出与式(3)相似的功率表示矩阵,用同样的方法将试验台架取得的功率数据处理为向量形式在程序中调用,经过拟合求得发动机的三维等功率曲面模型,如图13 所示。

图13 等功率曲面模型
2.2 发动机稳态模型的建立及其应用
2.2.1 发动机稳态模型的建立
前文基于多元线性回归理论在MATLAB 中拟合绘制出了该轻微型发动机的等燃油消耗率曲面模型与等功率曲面模型,在此基础上得到发动机的万有特性曲线模型,可采用MATLAB 中的程序语言将等燃油消耗率曲面模型与等功率曲面模型绘制在同一张三维图像中,通过中等位线contour投影命令就可以得到不包含边界的发动机万有特性曲线,再通过试验获得发动机熄火边界曲线,就可以得到如图14 所示的轻微型无人机活塞发动机万有特性曲线。

图14 轻微型活塞发动机万有特性曲线
依据图14 可以大致分析轻微型发动机的工作性能。分析图14 可知,右上方区域为该轻微型发动机的工作高效区间,在设计油电混动无人机时将发动机工作点设计在该区间内可使混动无人机具有较高的燃油经济性。基于所建立的活塞发动机万有特性曲线,采用如图15 所示的活塞发动机稳态模型建模方法,在Simulink 中能够建立如图16 所示的活塞发动机稳态模型。
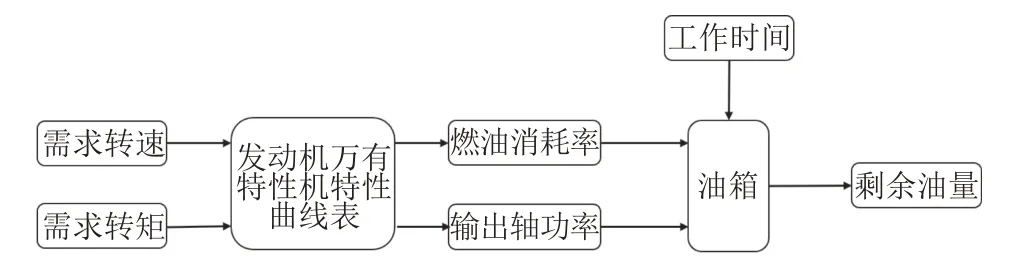
图15 活塞发动机稳态模型建模方法

图16 活塞发动机稳态模型
2.2.2 串联式油电混合动力系统模型的建立
研究轻微型无人机活塞发动机的稳态模型建立方法,目的是更好地将发动机应用到油电混合无人机动力系统中。本文中采用如图17 所示的串联式油电混合动力系统实验建模方法,即在给定工作时间和离合器齿轮传动比下根据发动机需求转速与负载操纵杆占空比获得当前发动机燃油消耗率、输出轴功率、发电效率及剩余油量,搭建了一种串联式油电混合动力系统模型,如图18 所示。图中所用电机特性曲线表与发电机特性曲线表皆是通过实验建模法获得。通过此模型可以进一步优化轻微型活塞发动机在油电混合动力系统中的应用,提高发动机能量利用率。
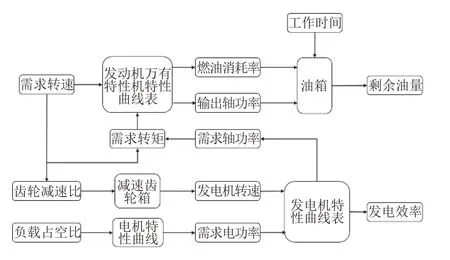
图17 串联式油电混合动力系统建模方法
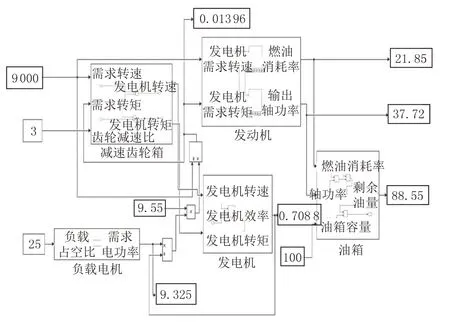
图18 串联式油电混合动力系统模型
3 发动机动态模型建立与验证
3.1 发动机动态模型建立
基于前文建立的发动机万有特性曲线,可以找到该型发动机的经济工作区间所对应的转速区间在7 000 r/min~10 000 r/min,转矩区间在0.04 N·m~0.07 N·m。为了更好地将发动机应用到串联式油电混动无人机动力系统中,可在发动机最佳工作区间内进行基于控制变量法的小偏差阶跃获得发动机的两输入两输出动态数值模型,输入量为油门开度(A)和需求转矩(T),输出量为功率(P)和转速(N)。通过动态响应试验,需求转矩取0.03 N·m~0.07 N·m的阶跃,油门开度取70%~90% 的阶跃,获得了如图19 所示的发动机动态响应曲线。
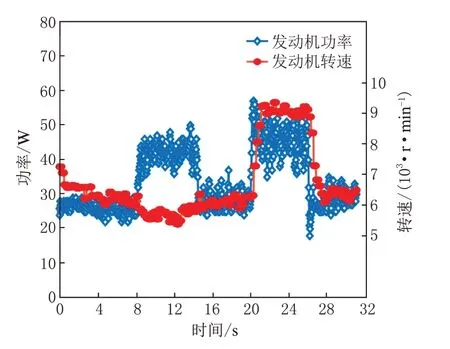
图19 ΔT=0.04 N·m,ΔA=20%的发动机动态响应曲线
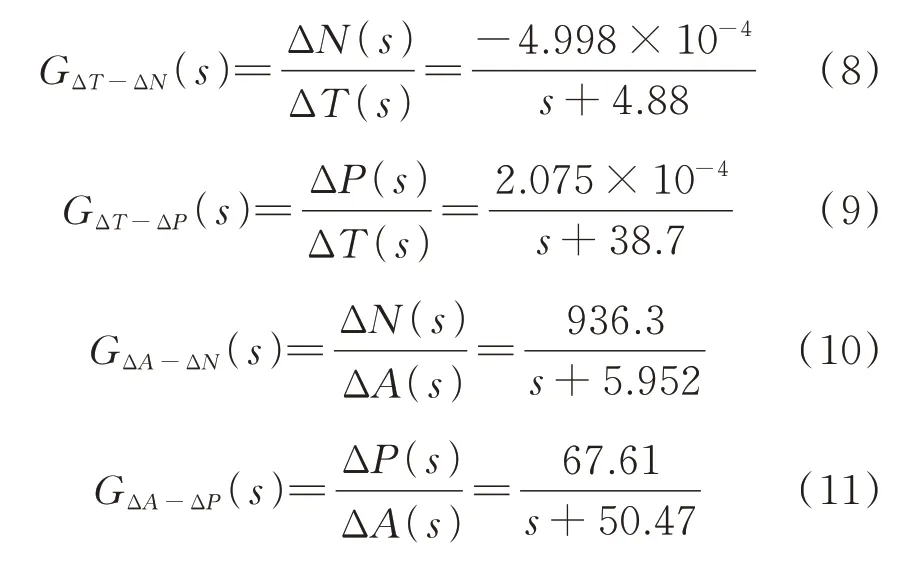
由图19 可以看出,发动机初始稳定转速为6 500 r/min,初始功率稳定在25 W,在第8 s 阶跃需求转矩后转速下降至6 000 r/min,由此可绘制出第1 条阶跃需求转矩下的转速响应曲线;功率上升至42 W,由此可绘制出第2 条阶跃需求转矩下的功率响应曲线。而在第20 s 阶跃油门开度后,转速上升至9 000 r/min,由此可绘制出第3 条阶跃油门开度下的转速响应曲线;功率上升至50 W,由此可绘制出第4 条阶跃油门开度下的功率响应曲线。将这4条曲线分别应用MATLAB 工具箱进行辨识,可以得到GΔT-ΔN(s)、GΔT-ΔP(s)、GΔA-ΔN(s)、GΔA-ΔP(s) 这4个传递函数,如式(8)~式(11)所示。系统辨识过程如图20 所示,所建立的发动机动态模型如图21 所示。
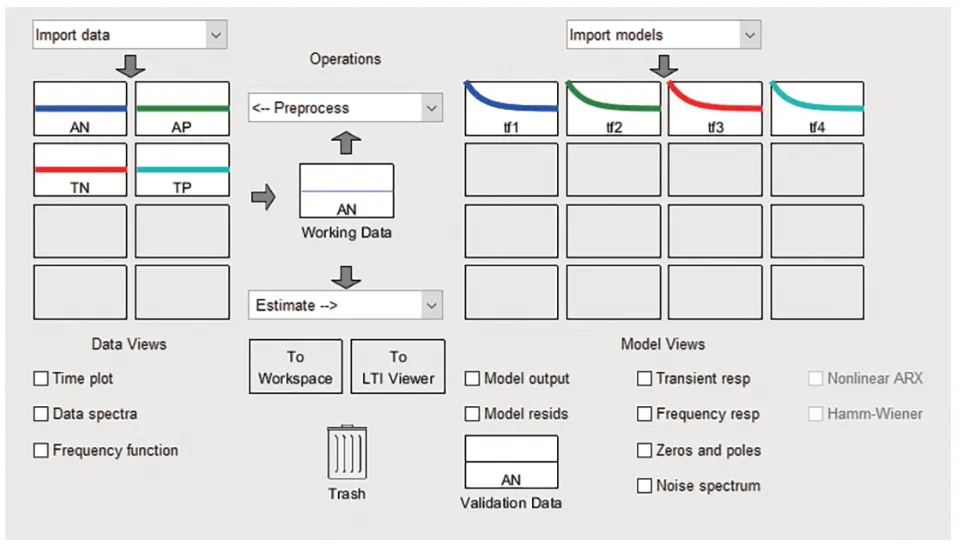
图20 MATLAB 辨识工具箱中一阶传递函数系统辨识过程

图21 轻微型活塞发动机动态模型
3.2 发动机动态模型验证
为了验证建立的轻微型活塞发动机动态模型,通过试验验证法,将试验台架实测的发动机阶跃需求转矩和油门开度后的输出功率、转速与动态模型结果进行对比,获得ΔT=0.02 N·m、ΔT=0.04 N·m、ΔA=10%、ΔA=20% 下的模型结果与试验结果对比,如图22~图25 所示。由图可以看出发动机动态模型结果与试验结果基本吻合,所建立的发动机动态模型基本能够表征该轻微型活塞发动机。
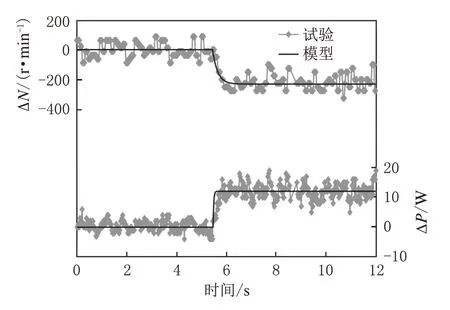
图22 ΔT=0.02 N·m 的模型结果与试验结果对比
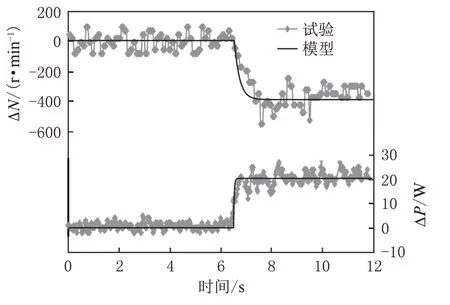
图23 ΔT=0.04 N·m 的模型结果与试验结果对比

图24 ΔA=10%的模型结果与试验结果对比

图25 ΔA=20%的模型结果与试验结果对比
4 结论
(1)基于本文中设计的活塞发动机测控试验台,采集到适用于油电混动无人机的活塞发动机的全工况参数,建立了发动机三维模型并在此基础上获得了较为平滑的轻微型无人机活塞发动机万有特性曲线,数据校验结果表明:试验台能够获得精度较高的数据,建模方法可行,数据误差不高于5%,精度良好。
(2)通过本研究中所绘制的发动机万有特性曲线寻找到了该型发动机经济区间,数据表明当发动机工作在7 000 r/min~10 000 r/min、输出功率为40 W~60 W 的工作区间内时,发动机具有较高的燃油经济性。
(3)采用实验建模法将发动机稳态模型应用到串联式油电混合动力系统模型中,结果表明混合动力系统模型运行规律与实际系统运行规律相符。
(4)采用控制变量法将发动机动态响应曲线进行系统辨识获得了不同变量对应输出下的传递函数,基于此搭建了发动机动态模型并将模型结果与试验结果进行对比验证。结果表明,所建立的动态模型能够基本描述该轻微型活塞发动机的动态响应过程。
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
车用发动机(2022年3期)2022-06-24
汽车实用技术(2022年11期)2022-06-20
防爆电机(2021年3期)2021-07-21
财经(2020年21期)2020-11-12
专用汽车(2020年6期)2020-06-28
装甲兵工程学院学报(2019年2期)2019-07-10
汽车电器(2018年1期)2018-06-05
电子制作(2017年9期)2017-04-17
客车技术与研究(2014年1期)2014-03-20
