
基于β射线和光散射法的颗粒物测量系统*
2022-08-12 03:30王晓东
山西电子技术 2022年4期
靳 燕,王晓东
(山西省信息产业技术研究院有限公司,山西 太原 030012)
1 绪论
改革开放以来,工业化、城市化进程的不断加快,使我们国家以很快的速度完成了西方国家两个世纪的原始积累,但代价是生态被破坏、环境被污染,居民的身体健康受到严重威胁,因此针对大气颗粒物检测和环境预警成为了当下实现绿色可持续发展迫在眉睫的任务[1]。
β射线检测方法主要利用附着在滤膜上不同性质的颗粒物的衰减来检测颗粒物的质量浓度,具有所花成本较少,检测准确率高,后期的维护成本低等优点[2]。现有我国使用的基于β射线的颗粒物检测产品在环境较为恶劣的区域和天气条件下,检测精度不是很高,存在一定的局限性。本文设计的基于β射线和前散射法的颗粒物检测系统,采用单个采样头同时测量目标区域目标气体,利用前散射法获得扬尘的顺时相对变化,利用β射线法测量扬尘的小时浓度,并用小时值校准顺时值,获得高分辨的实时大气颗粒物浓度。
2 大气颗粒物测量系统理论基础
2.1 β射线测量原理
β射线测量原理基于β粒子在穿透物质时会被其所吸收,并且射线强度与吸收层厚度成反比,因此通过比较检测前后检测滤纸质量差值与采样面积,就可获取当前时段内被检测大气颗粒物浓度。β粒子在穿透物质时会被其所吸收,并且射线强度与吸收层厚度成反比的现象被称为β吸收,如图1所示为β衰变能谱。
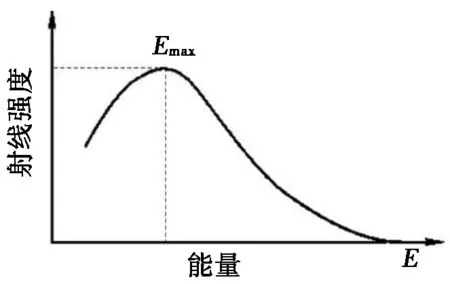
图1 典型β射线能谱示意图
β吸收与被检测物质质量有关,而与颗粒物的形状、种类、颜色、粒径和化学组成等无关。通过计算检测期间β射线的衰减量即可计算大气颗粒物的增加量,当待检测气体经由采样泵吸收至采样管内并经滤膜排出后,滤膜上便会附着相应的颗粒物。之后β射线通过附着有大气颗粒物的滤膜时,β射线的能量便会衰减,根据β射线衰减的程度进而获取样气中颗粒物的浓度。
2.2 光散射理论
光散射主要是光在通过不同折射率微粒的介质中,各个方向的次级电磁波辐射均匀性受到了破坏,使得各方向次级电磁波辐射干涉的结果出现了差异,形成散射现象[3]。光的散射示意图如图2所示。
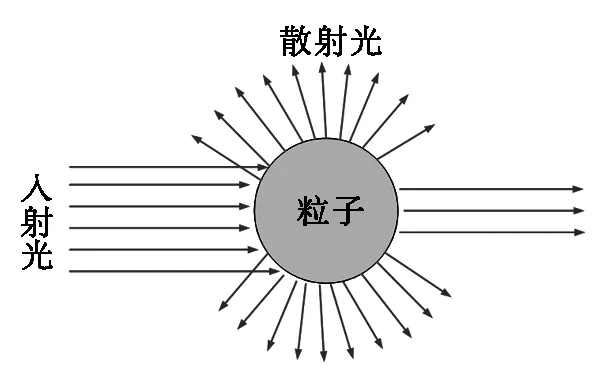
图2 光的散射示意图
3 大气颗粒物测量系统设计
系统以采样泵为动力源,将空气通过颗粒物切割器处理后抽取到双通道气体采集分析结构,采用前散射法和β射线同时测量超细颗粒物[4]。
3.1 采样单元
采样单元主要用的是切割器,分析实际需求后选择旋风式切割器。除了选择合适的切割器,必须保证流量的稳定性,本文研究自动控制流量稳定性的方法,采用质量流量计和比例阀,设计流量调节的算法,根据环境温度和湿度调节体积流量,保证流量控制的精度。保证流量稳定性在2%以内[5]。
3.2 测量单元
大气超细颗粒物检测系统是基于β射线法测量技术和前散射法技术来测量样气中颗粒物的含量。β射线通过附着有颗粒物的滤膜时质量会衰减,其衰减规律符合指数分布[6],其衰减公式如下:
I=I0e-μm·ρ·L.
(1)
通过式(1),可以得到大气颗粒物的质量浓度C的表达式为:
(2)
式中,C为大气颗粒物的质量浓度;Vs为滤膜的有效采样面积;V为采样气体体积。
3.3 传动装置
传动装置是为确保将待测滤纸传送至指定位置,并在快速连续测量过程中使准确率和精度达到目标值。其中抽气管道控制模块承担抽气采样工作,当进行抽气采样时,抽气管道控制模块会将上下游两段管道压合,在两段管道中间设置测试滤纸,抽气采样结束后,将原先压合的两段抽气管道分开,这一过程中不控制滤纸动作。待采样结束后,滤纸传动装置会将附着有颗粒物的滤纸传送至待测位置进行后续测量工作。
4 大气颗粒物测量系统
本系统的基本组成主要有四部分,即采样,测量,传动及数据处理。其中采样部分主要有大气颗粒物切割器,采样管,过滤器,加热器,温湿度传感器,质量流量控制器(流量计)及抽气泵等组成[7]。
4.1 连续厚度衰减补偿技术
利用连续厚度衰减补偿技术,可以避免计数器在不同粒子浓度下的响应差异,降低对高计数情况下对计数器的恢复时间和死时间的要求,提高测量精度计测量范围,具有在整个测量范围内无需分段标定的优点。这种技术可以通过调节厚度变化,保证通过含尘滤纸的计数和穿过空白滤纸的相同。使含尘滤纸前后的计数值接近相等。再根据前后浓度变化计算出颗粒物浓度,最后根据采样的温湿度和环境温湿度对计算的浓度进行修正。
4.2 智能动态加热器
由于采样时的相对湿度和温度对测量结果具有重要的影响,为保证通过滤纸的采样空气湿度始终保持在40%以内,规避湿度累计造成的纸带问题和测量误差。研究了不同温湿度天气采样温湿度控制策略和低温、高温环境下最佳的温度湿度控制值。并研究温湿度补偿方法,实现全天候高精度测量,保证测量结果不受外界条件的影响。
4.3 粒子图像测速技术
在一定时间间隔内,通过测量质点运动位移从而实现对质点运动速度的测量即为PIV技术的基本定义。假设空间中有一质点在运动,其运动方程式如公式(3)所示:
(3)
其中:vx,vy,vz为质点在x,y,z方向上的速度;x(t),y(t),z(t)为质点在t时刻的位置;t为间隔时间;x(t+Δt),y(t+Δt),z(t+Δt)为经过一段间隔时间后质点的位置。
传统的数码图像是由很多像素点组成,这些像素点以正方形的形式排列组成了图像。像素点组成的图像可由数组和矩阵进行数字化的描述[8]。
以像素的灰度值表示图像,可以通过二维离散矩阵f(i,j)来表示点(i,j)的灰度值。
(4)
其中:M代表水平方向像素数量;N代表垂直方向像素数量。
之后对图像相关进行处理,标准相关函数如公式(5)。
(5)
其中:x,y代表像素坐标;Δx,Δy代表位移;I0,I1表示位移前后图像的像素值;C为相关系数。
4.4 大气颗粒物浓度测量方法
光散射法可以分为激光前向散射法、激光后向散射法、激光侧向散射法以及前向、后向散射相融合的方法。前向散射是指散射角小于90度的散射方式,采用这种散射形式的器件有光电感烟探测器。利用前散射法获得扬尘的顺时相对变化,利用β射线法测量扬尘的小时浓度,并用小时值校准顺时值,获得高分辨的实时扬尘浓度。
5 结论
随着我国工业化和城市化进程的不断加快,生态环境遭到了不同程度的破坏,混杂大量颗粒物的雾霾天气严重影响着人们的身体健康。针对粉尘颗粒物检测的需求日益增加这一社会现象,提出一种基于光散射和β射线的大气超细颗粒物检测设计方案,详细介绍了β射线理论和光散射理论,提出了相应的系统模块的设计方案。
本文主要研究大气颗粒物浓度检测和微控制器系统的设计与研发,在确保系统稳定性能的前提下,采用粒子图像测速技术实现了对PM10、PM2.5在线监测。结合前散射法、β射线法、衰减补偿技术、零点和漂移自动标定技术实现了更高精度的颗粒物浓度实时监测。
猜你喜欢
核技术(2022年10期)2022-11-19
中国饲料(2022年5期)2022-04-26
玻璃纤维(2022年1期)2022-03-11
环境监控与预警(2021年6期)2021-12-07
皮革制作与环保科技(2021年14期)2021-11-12
核技术(2021年10期)2021-10-26
科学家(2021年24期)2021-04-25
科技视界(2021年4期)2021-04-13
中学化学(2019年2期)2019-07-08
中国科技纵横(2014年12期)2014-12-10
