
Novel roll effector based on zero-mass-flux dual synthetic jets and its flight test
2022-07-30 09:40:06ZhenbingLUOZhijieZHAOJiefuLIUXiongDENGMuZHENGHangYANGQingyangCHENShiqingLI
Chinese Journal of Aeronautics 2022年8期
Zhenbing LUO, Zhijie ZHAO, Jiefu LIU, Xiong DENG, Mu ZHENG,Hang YANG, Qingyang CHEN, Shiqing LI
College of Aeronautics and Astronautics, National University of Defense Technology, Changsha 410073, China
KEYWORDS Active flow control;Actuators with two diaphragms and three cavities;Circulation control;Dual synthetic jets;Flight test;Roll attitude control
Abstract The autonomous and controllable Dual Synthetic Jet Actuator (DSJA) is firstly integrated into the Unmanned Aerial Vehicle(UAV), and flight tests without the deflection of rudders are carried out to verify the viability of DSJA to control the attitudes of UAV during cruising.DSJA is improved into an actuator with two diaphragms and three cavities, which has higher energy levels. Actuators, differentially distributed on both sides of the wings, are installed on the trailing edge close to the wing tips. Flight tests, containing Differential Circulation Control(DCC) using double-side actuators, Positive Circulation Control (PCC) using left-side actuators and Negative Circulation Control (NCC) using right-side actuators, are implemented at cruising speed of 25 m/s.Results show that roll attitude control without rudders could be realized by DSJAs.DCC and NCC can generate the rightward roll and yaw angular velocity, prompting UAV to turn right. The stronger controlling ability can be achieved by DCC, with the maximum roll angular velocity of 15.62(°)/s.PCC can generate a rightward roll moment,but a leftward yaw moment will be produced at the same time. Leftward yaw induces the leftward rolling moment, which weakens the roll control effect, making UAV keep to yaw to the left with a small slope.
1. Introduction
Nice stealth performance of UAV could be destroyed by mechanical rudders, and traditional actuators’ characteristics,such as saturation,dead zone and so on,make great difficulties for controlling system design.Active Flow Control (AFC)technology, run by only exerting control at certain sensitive point of the flow filed, is able to change the global flow fields and reconstruct the pressure distributions around the surface of UAV and hence,generate aerodynamic forces and moments needed by flight control system, realizing the control of UAV attitudes.AFC,with advantages of no need of mechanical control surfaces, high efficiency, adjustable momentum injection and easiness to integrate, has been widely applied in the area of flight control, including Circulation Control (CC), thrust vector control and so on.
CC based on Coanda effect has been thought as one of the most promising flight control technologies,which is run by injecting a high-velocity tangential jet over a Coanda surface to suppress the boundary-layer separation and hence, move the trailing-edge separation point and leading-edge attachment point downstream and increase the lift at certain location. In fact,CC was designed as a high-lift device of UAV initially,with disadvantages of great blowing mass flow rate,extra pressure drag caused by the bluff trailing edge, high integration complexity and so on,limiting its engineering application.Fortunately,during the late 1990s,CC was thought as a method of providing three-axis control forces and moments,which significantly reduced the required jet momentum coefficient,the volume of ducts and the difficulties to integrate,greatly improving its application capabilities. Until now, CC has been used in many demonstration UAVs to replace conventional mechanical rudders, such as Tutor, Santos, JAVA, DEMON,MEGMA and so on, which confirms that CC could offer enough three-axis control forces for an aircraft.
Traditional CC devices, operated by bleeding a large amount of air from engines or air bottles to generate a strong jet, have many disadvantages, such as complex design of interior ducts, big volume and weight, high integration complexity and so on. Moreover, the fluidic control unit of the perfect profile, ICE-04, has the weight and volume of 176.9 kg and 0.127 mrespectively.Meanwhile, inducing gas from engines can also discount the net thrust and payloads. Therefore, it’s necessary to invent a new type of CC actuator with advantages of low volume, low weight, low energy consumption, no need of ducts and air sources, easiness to integrate and so on.
Synthetic Jet Actuator (SJA), invented by Smith and Glezer,with advantages of low weight and volume, no need of ducts or air sources and strong integration ability,has been proved its great potentials in flight control.Moreover, CC based on SJA can improve the controlling efficiency by an order of magnitude, but the lift pulsation will be enlarged when actuated at low frequency,which is not helpful to the design of control system. Fortunately, SJA actuated at a reduced frequency of O(10), where the driving frequency is decoupled from the natural frequency,can avoid the unsteady loads.The engineering application of SJA to flight control,however, has not been seen until now. The main reason may contain the weak control ability of SJA and easiness to failure of the diaphragms. Dual Synthetic Jet Actuator (DSJA),composed of two cavities and a PZT diaphragm (shown in Fig. 1), has not only the advantages of SJA but also higher energy efficiency. A PZT diaphragm is shared by two cavities,which avoids the failure caused by excessive pressure difference between controlled flow field and the environment. Moreover,the control ability of DSJA is twice as strong as that of SJA under the same input power.
To explore the engineering applying potential of DSJA in the area of flight control,DSJA was improved into an actuator with two diaphragms and three cavities, which has higher energy levels.For convenience, this new actuator is called the Novel Dual Synthetic Jet Actuator(NDSJA)in the following contents.Moreover,NDSJAs were integrated into UAV as a novel roll effector based on CC and flight tests were firstly carried out to verify the ability of Dual Synthetic Jet (DSJ)to control the lateral and heading attitudes of UAV.
2. Novel roll effector
The structure of DSJA is optimized to get a higher energy level and stronger control abilities for the flow field.The new generation of DSJA, composed of a shell, a sleeve, a cover plate,three exits (Exit1, Exit2 and Exit3) and two PZT diaphragms(PZT1 and PZT2), is designed as a novel roll effector, which is shown in Fig. 2(a)and (b). The new actuators are installed on the trailing edge close to the wing tips. Moreover, the shell is divided into three small cavities—Upper Cavity (UC) with Exit2, Middle Cavity (MC) with Exit1 and Lower Cavity(LC)with Exit3—by two PZT diaphragms, which is displayed in Fig. 2(c). UC, MC, and LC, having the same diameter of 51 mm, are respectively compressed/ swelled by PZT1, PZT1 and PZT2, PZT2. The vibration directions of PZT1 and PZT2 are opposite. Moreover, the length, width and height of NDSJA are 65 mm, 69 mm and 20 mm severally. Furthermore, the weight of an actuator is only 41 g, indicating great easiness to realize the integrated design. The Coanda radius r and the height h of all exits are respectively set as r = 9 mm and h = 1 mm. In addition, the width of Exit1, Exit2, Exit3 are severally 25 mm, 13 mm and 13 mm.
During the flight test, the actuated frequency f and voltage U are severally set as 650 Hz and±140 V,in which the power of single diaphragm is 3-4 W. PZT1 and PZT2 have the same actuated parameters. Reduced frequency Fis defined as

in which Uand c are respectively the velocity of incoming flow and modified chord of the wing. In this experiment, Fis set as 5.98.
The Particle-Image-Velocimetry (PIV)experiments are carried out to evaluate the flow characteristics of NDSJA. The PIV system comprises a twin-cavity laser (2 × 200 mJ) and a charge-coupled-device (2456 × 2056 pixels, 12 bits) camera with a 24 mm F/2.8 lens and a narrow band-pass filter of 532 ± 5 nm. The NDSJA is fixed in a closed glass chamber with size of 200 mm × 200 mm × 600 mm. The smoke with an average diameter less than 5 μm is adopted as tracer particles.The laser sheet with thickness of 1 mm is employed to illuminate two-dimensional flow fields. The images are captured with a magnification of 0.052 mm∕pixel and sampling frequency of 5 Hz. The cross-frame time is set to 385 μs. The uncertainty of the tracer-particle displacement is less than 0.1 pixels. Therefore, the uncertainty of the measured velocity would be less than 0.05 m∕s.A DSJ cycle is uniformly divided into 4 phase points. The PIV recording is implemented using phase-shifting technology, and then a phase-averaged velocity field is acquired based on 50 pairs of captured images at each phase point.
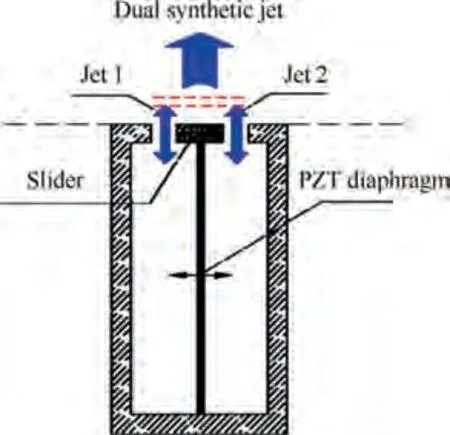
Fig. 1 Structure diagram of DSJA.
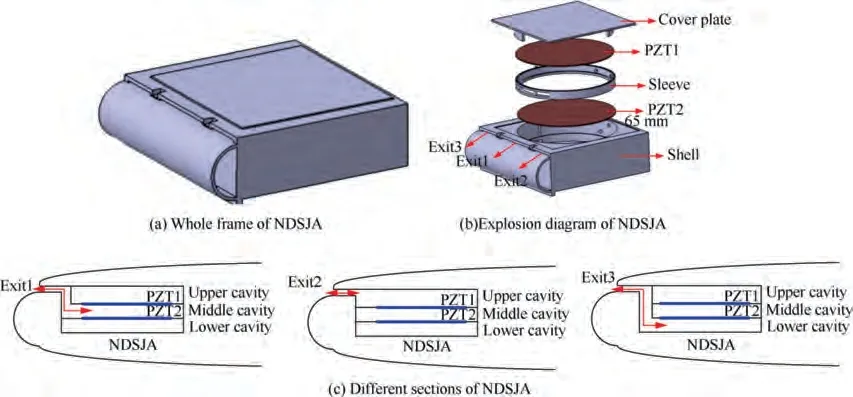
Fig. 2 Structure diagram of NDSJA.
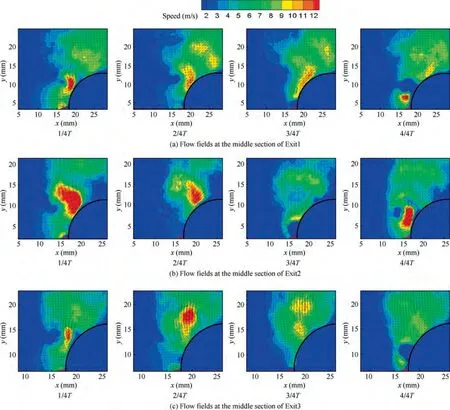
Fig. 3 Static PIV flow fields of NDSJA.
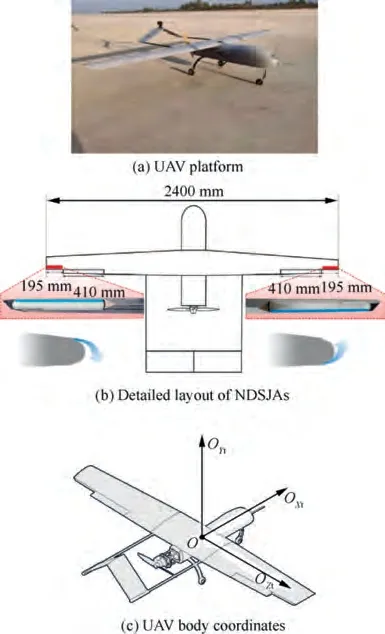
Fig. 4 Unmanned flight test platform.
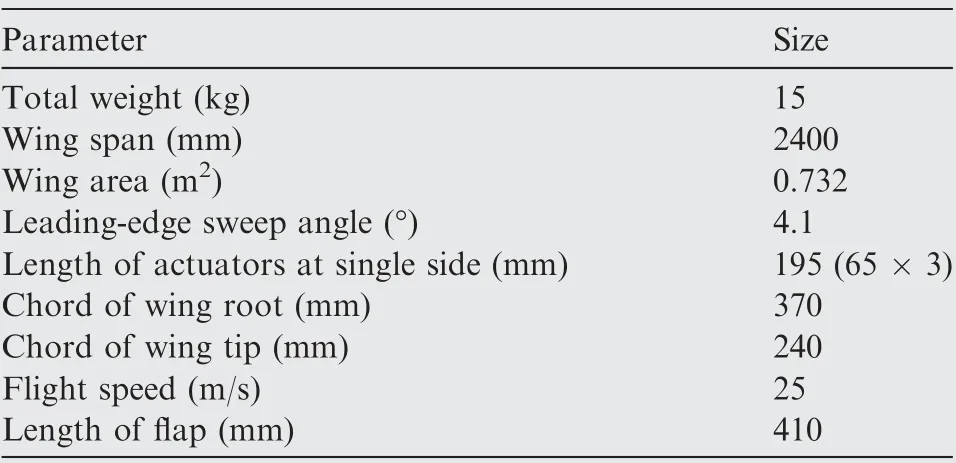
Table 1 Detailed information of UAV platform.
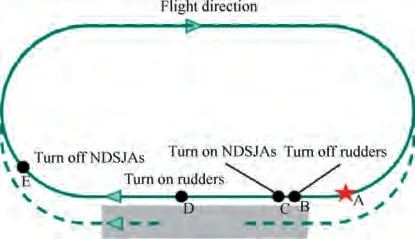
Fig. 5 Flight route.
The static PIV flow fields of different phases at the middle section of Exit1,Exit2,and Exit3 are shown in Fig.3,in which the red lines and black lines severally represent the exit and the Coanda surface. The label 1/4T, 2/4T, 3/4T and 4/4T mean that the jets are respectively in the process of‘‘accelerating suction”,‘‘decelerating suction”,‘‘accelerating blowing”and‘‘decelerating blowing”. The three jets, with characteristics of periodic blowing and suction,are attached to the rounded surface,but the velocity evolution and separation location are different,suggesting that the spanwise flow will exit downstream.In addition, the peak jet velocities at 1 mm from the center of Exit1, Exit2, and Exit3 measured by the hot wire anemometer are respectively 25.8 m/s, 27.3 m/s and 10.1 m/s, which are time-averaged over 150 cycles.These values indicate the energy levels of jets are low because of the small power and big aerodynamic drag caused by complex cavities.Meanwhile,the uniformity of the jet velocities in the span direction is poor,which is not helpful for the design of control system.The main reason why it occurs is the different structures of three cavities,resulting in the different aerodynamic drag. Significantly, UC, with the peak velocity of 27.3 m/s at Exit2,has almost the same cavity volume as LC,but the peak velocity at Exit3 is only 10.1 m/s because of the more complex internal structures in LC,which causes the bigger fluidic drag. In the future, the structure of NDSJA will be improved to increase the energy level and the uniformity of the jet velocities.
3. Flight test platform and method
UAV platform, with characteristics of upper single wing and inverted V tail, is chosen and detailed information is shown in Fig.4(a)and Table 1.Six novel roll effectors(NDSJAs),differentially distributed on both sides of the wings, are installed on the trailing edge close to the wing tips. In detail, three NDSJAs are installed in the left-side wing, whose exits are close to the upper surface. Three NDSJAs are installed in the right-side wing, whose exits are close to the lower surface.The aerodynamic force distributions along the wing could be changed by the work of NDSJAs, which realizes the control of lateral and heading attitudes. Specific layouts are displayed in Fig.4(b),in which the red parts represent NDSJAs.In addition, it is worth noting that the Coanda radius of actuators closest to the wing tips is decreased to 8 mm for the size restrictions. Fig. 4(c) shows the UAV body coordinates. In this experiment, roll around the Ois mainly focused.
Flight route is shown in Fig. 5. At point A, UAV recovers from a condition of right turn and turns into level flight before arriving at point B with the help of mechanical rudders.When reaching point B, UAV maintains level flight and all rudders will be turned off.At point C,novel roll effectors will be actuated to control the attitudes of UAV.At point D,rudders will be turned on to control UAV to resume the normal flight route.Then,UAV will turn right under the control of rudders and NDSJAs. At point E, NDSJAs will be turned off and UAV keeps turning right with the control of rudders. The dynamic response of UAV attitudes after point C will be focused.
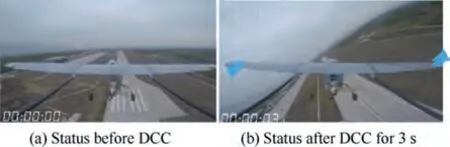
Fig. 6 Comparison of flight status before and after DCC.
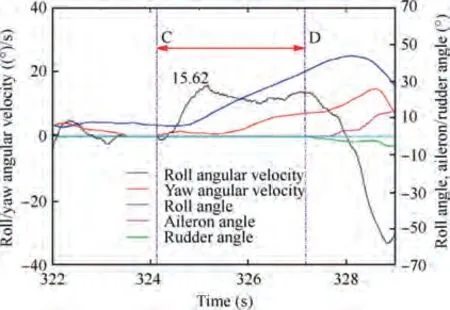
Fig.7 Flight attitude parameter changing process under control of DCC.
4. Results and analysis
Differential Circulation Control (DCC) using double-side actuators, Positive Circulation Control (PCC) using left-side actuators and Negative Circulation Control (NCC) using right-side actuators are tested at flight speed of 25 m/s and results are as follows.
The comparison of UAV status before and after DCC is displayed in Fig. 6, suggesting that UAV rolls to the right under the control of NDSJAs. The lift and drag of left-side wing are increased. Meanwhile, the lift and drag of right-side wing are severally decreased and increased. Changes of these aerodynamic forces form a rightward roll moment,which realizes the control of lateral attitudes. In addition, the attitude parameters are shown in Fig. 7. At point C, NDSJAs start to control UAV without rudders until point D, showing that rightward roll angular velocity, with the maximum of 15.62(°)/s, and rightward yaw angular velocity could be generated by DCC and keep increasing, because of the rightward roll moment and the coupling of lateral and heading control characteristics. The roll angle also has an increasing trend. Moreover, there is almost no delay in the change of roll and yaw angular velocity, but a delay of 0.75 s in the change of roll angle exits.
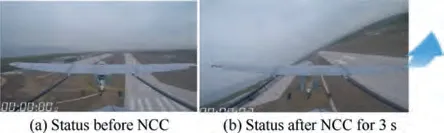
Fig. 8 Comparison of flight status before and after NCC.
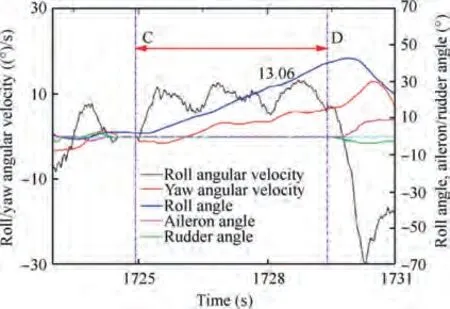
Fig.9 Flight attitude parameter changing process under control of NCC.
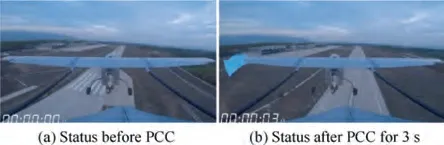
Fig. 10 Comparison of flight status before and after PCC.
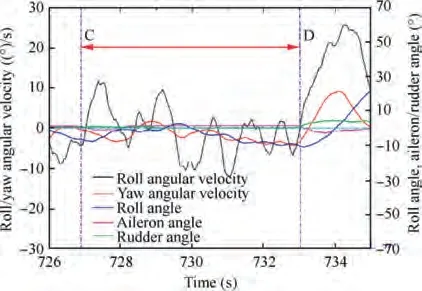
Fig. 11 Flight attitude parameter changing process under control of PCC.
The comparison of UAV status before and after NCC is displayed in Fig.8,suggesting that UAV rolls to the right with the control of NCC. The lift and drag of right-side wing are respectively decreased and increased, producing a rightward roll moment and a rightward yaw moment, which make UAV turn right.Moreover,the attitude parameters are shown in Fig. 9. At point C, NDSJAs start to control UAV without rudders until point D, showing that rightward roll angular velocity, with the maximum of 13.06(°)/s, could be generated by NCC and keep increasing, but the leftward yaw angular velocity will be produced initially with the possible reason of the crosswind interference.Then,the direction of yaw angular velocity is inverse and keeps increasing.The roll angle also has an increasing trend.In addition,there is almost no delay in the change of roll and yaw angular velocity,but a delay of 0.3 s in the change of roll angle exits. It’s worth noting that the roll angular velocity produced by NCC is slightly lower than that caused by DCC, indicating that the control ability of DCC is stronger.
The comparison of UAV status before and after PCC is displayed in Fig. 10, suggesting that there is basically no change in attitudes after applying PCC for 3 s. The lift and drag of left-side wing are both increased, which produce a rightward roll moment and a leftward yaw moment.In this UAV layout,the leftward yaw moment will generate a leftward roll moment,weakening the effect of flight control,which results in the inapparent change of attitudes.The attitude parameters are shown in Fig.11.At point C,NDSJAs start to control UAV without rudders until point D, showing that a rightward roll angular velocity and a leftward roll angular velocity, weakening each other, could be generated by PCC and eventually evolve into the leftward yaw and roll angular velocity. In this process,the roll angle increases first and then decreases, and finally UAV keeps turning left. Moreover, there is almost no delay in the change of roll and yaw angular velocity, but a delay of 0.35 s in the change of roll angle exits.
5. Conclusions
Zero-mass-flux DSJA was improved into NDSJA with two diaphragms and three cavities,having the higher energy levels.Moreover, NDSJAs were integrated into UAV as a novel roll effector and relative flight tests were firstly carried out to verify the ability of DSJ to control the lateral and heading attitudes of the aircraft. Results are as follows.
(1) The autonomous and controllable DSJ technology can achieve the control of roll attitudes without rudders during cruising through AFC.
(2) The rightward roll and yaw angular velocity could be generated under the control of DCC and NCC, making UAV turn right. The control effects of DCC, with the max roll angular velocity of 15.62(°)/s, is better than NCC.
(3) The rightward roll moment and the leftward yaw moment could be produced simultaneously with the control of PCC, which interact with each other and hence,weaken the control effects of UAV. Finally, UAV will keep to yaw to the left with a small slope.
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
This research was co-supported by the National Natural Science Foundation of China (Nos. 11972369 and 11872374)and the Youth Science and Technology Innovation Award Funded Project of National University of Defense Technology, China (No. 434517314).