
基于UWB 技术的车辆定位系统设计与实现
2022-07-29 06:54:44张雨桐刘永艳
智能计算机与应用 2022年8期
张雨桐,刘永艳,杨 凡,乐 洋,4
(1 南京邮电大学 软件学院,南京 210023;2 南京邮电大学 通信与信息工程学院,南京 210003;3 南京邮电大学地理与生物信息学院,南京 210023;4 南京邮电大学 江苏省智慧健康大数据分析与位置服务工程实验室,南京 210023)
0 引言
近年来,随着经济的发展,汽车越来越多,停车场车位需求激增。然而,由于城市建设土地资源有限,无法适应车辆的增长速度。面对这种状况,现如今的停车场管理系统在一些方面则暴露出很多问题与不足。如:车主无法快速找到停车位或返回寻车、全球导航卫星系统(Global Navigation Satellite System,GNSS)信号在室内定位的不稳定性等。这些问题的存在使泊车者不但占用场内出入主车道资源,甚至会出现停车场内交通拥堵。
为了解决传统停车场管理系统中的现有弊端,许多学者从停车场定位角度做了一定研究。如:张秋艳等人设计了基于RFID 智能停车场管理系统,结合其它模块实现人机交互,在低成本和运行稳定上占有较大优势。徐丹等人提出了基于ZigBee技术的停车定位系统,通过相关技术,将信息联系起来可以实现多个停车场的互通,但其定位精度较低,容易受到周围环境的影响。陈晓玉利用WiFi 定位技术,实现地下停车场的智能管理,通过研究相关算法,提高车辆定位的实时性,但在定位精度方面还有待进一步优化与研究。张雪采用蓝牙定位技术实现了车位的定位与反向找寻功能,但定位的准确性却仍需继续提升。
现存的室内定位技术包括RFID 定位技术、蓝牙定位技术、ZigBee 定位技术、超宽带技术等。其中,RFID 定位技术受室内外因素干扰性较大;蓝牙定位技术受噪声干扰性大,定位距离短;ZigBee定位技术却存在室内精度低等缺点;而超宽带(Ultra Wideband,UWB)定位技术是一种基于UWB脉冲信号的无载波无线通信技术,具有传输速率高、发射功率低、定位精度高等特点。
基于UWB 的无线室内定位系统,具有较高的定位精度及实时跟踪性能,能够很好地满足用户的室内定位需求。目前,该技术在无线室内定位领域具有十分广阔的应用前景和研究价值。因此,本文将利用UWB 定位技术对室内车辆进行定位,帮助车主在取车时能快速定位到车辆的位置,提高便利性。
1 系统设计
1.1 总体架构
基于UWB 定位技术的地下停车场车辆定位系统主要由硬件模块、服务器端、移动端APP 三部分组成,总体架构如图1 所示。由图1 可知,对系统结构中各个组成部分的功能设计原理拟展开研究分述如下。

图1 系统总体架构图Fig.1 Overall system architecture
(1)硬件模块。主要由UWB 定位标签、UWB基站、上位机以及车位感应器等构成。当带有标签的车辆进入地下停车场时,标签与停车场内基站进行通信传输;UWB 基站将该信号和对应信号的时间传输给上位机。
(2)服务器端。对上位机接收的数据进行解算,得到车辆位置信息;数据库主要存储车辆的位置及其用户信息,为后续寻车引导做准备;室内停车场地图的制作,是实现地图的基本浏览、缩放、定位查询和路径规划等功能的关键。
(3)移动端APP。主要包括停车导航与反向寻车导航等功能。用户登录或注册此终端后,用户信息将存入数据库系统内,以供信息查询。根据用户输入的地点名称、车牌号等信息,显示其停车时间与位置信息,为用户规划最近的车位路线。APP 可直接进行车位的查询,并且为用户实施导航,方便用户寻车。
1.2 UWB 硬件设计
1.2.1 设备选型
DW1000 芯片是Decawave 公司推出的超宽带定位芯片,该模块集成了内置天线及相应的射频电路和时钟电路,功耗低,输出频率为100 Hz。DW1000 是通过更新中断寄存器中的中断标志位来通知主控芯片各类事件的发生,可用来双向测距和定位。因此,本文选择DW1000 芯片作为UWB 定位系统中的基站与标签。
1.2.2 UWB 室内定位系统组成
UWB 定位系统包括待定位目标节点、基站和上位机解算平台。总地来说,其定位是利用标签向基站发送UWB 脉冲信号,完成测距交互,得到标签与各基站的距离信息、并送至上位机;上位机利用相关定位算法解算标签相对位置坐标,实现定位功能。UWB 定位系统基本功能示意如图2 所示,定位系统工作原理如图3 所示。由图3 可知,这里将对各重点组成的设计原理给出剖析论述如下。
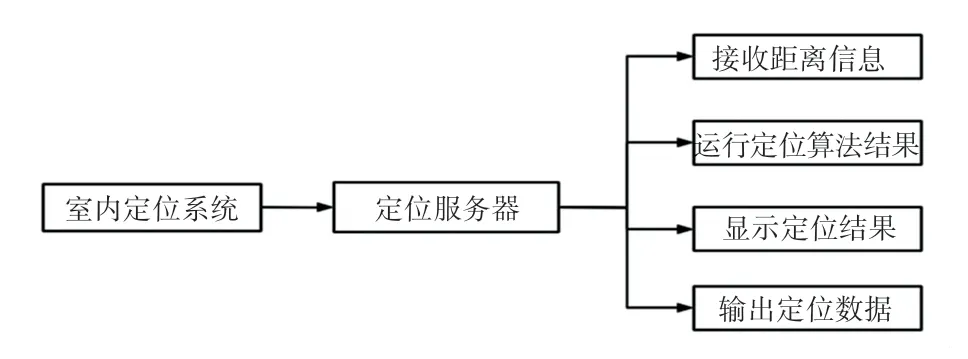
图2 定位系统功能示意图Fig.2 Schematic diagram of the positioning system functions

图3 UWB 定位系统工作原理图Fig.3 Working principle diagram of UWB positioning system
(1)UWB 基站:UWB 基站作为室内定位系统的信标节点,通过在室内空间部署基站,覆盖整个定位区域。其中,基站0 作为主基站通过数据线与上位机进行信息交互。
(2)UWB 定位标签:可以与各基站进行通信的节点,基站与定位标签之间、基站与基站之间均通过UWB 信号进行信息交互。
(3)上位机解算平台:各个基站将距离信息全部传送给主基站0,上位机根据数据线获得基站0中的测距信息,对定位标签通过三边定位法进行定位,而后再将定位标签的坐标信息显示出来。
因此,本项目将UWB 定位标签嵌于车辆外壳,当泊车者进入停车场时,系统可以对该车辆做实时定位,并向泊车者提供最优的停车方案;当车主返回停车场,寻找场内泊车的时候,通过手机里面的定位系统,经后台整合计算,转换为基于UWB 定位系统下的坐标,再根据车辆的历史定位信息,即可帮助车主快速定位泊车的位置,提高取车效率。
1.3 移动端APP
本系统设想的实体为手机应用程序,该应用程序集成了停车场管理、数据统计、系统管理、自主泊车六大应用模块,反向寻车模块为系统扩展模块,授权用户可以通过该管理平台进行系统管理和信息查看。
1.3.1 应用程序功能设计
移动端主要功能如下:
(1)用户注册/登录。用户可在终端注册账号,注册成功后即可登录进入本系统。
(2)地图控制。终端可显示地图,并可对地图进行放大、缩小和移动。
(3)实时定位。用户所在位置可在地图上标注,并给出详细的位置信息。
(4)停车导航。根据用户所在位置,为用户提供附近停车场地址和路线。若在室外能为用户找到合适的停车地,而在室内则为用户规划最近的车位路线。
(5)信息查询。根据用户输入的地点名称,显示其停车时间与位置信息。
(6)反向寻车导航。用户通过程序可直接查询车位,并为用户进行导航,方便用户寻车。
无论是针对路边、或者室内停车场,用户均可使用移动终端软件,通过无线通信技术将数据传输至业务服务器,从而向业务服务器发送功能请求、如最短/最优路径查询请求等。服务器收到该请求后,执行业务逻辑,并将处理结果反馈给用户客户端,完成响应。
1.3.2 APP 开发平台
本次系统主要在MUI 平台进行APP 的开发。终端结合了ArcMap 等地图服务,将数据及时传送到基于位置服务(Location Based Services,LBS)的管理平台,并与用户通信,提供定位导航、找车寻车等服务。在地图服务类开发方面,MUI 平台的地图接口包含了一系列与地图开发功能相关的类,提供了许多地图操作的功能。此外,该数据库是在MySQL中进行开发,在MUI 平台上使用SqlConnection 对象连接数据库。对于SQL 语句的执行与存储调用,可以建立SqlCommand 对象,以进行有效的沟通和管理。用户端设计框架如图4 所示。

图4 首页、停车、取车设计图Fig.4 Home page,parking and pick-up design drawing
1.4 服务器端
设计内容包括车辆定位解算模块、标准地图的制作、数据库设计等模块。这里,将对此进行阐释详述如下。
1.4.1 车辆定位解算模块
(1)定位数据获取及处理。系统采用UWB 室内定位技术,通过用户车辆安装的定位标签与附近基站的通信进行定位,从而获得当前位置。对于LBS 管理模块,开发人员可利用平台的定位服务,链接UWB 上位机的数据来获取用户的位置信息。
(2)坐标转换。由于UWB 设备架设在地下停车场,用户反向寻车时并不处于UWB 设备所建立的相对坐标系内。为了让用户手机接收到GNSS 信号,更直观地在手机上看到自己和车辆所在位置,将GNSS 卫星所测的室外大地坐标系与UWB 的相对坐标进行转换。本文将UWB 技术与GNSS 卫星系统结合起来,在对车主进行定位时,充分发挥手机里GNSS 定位系统的作用。对于GNSS 卫星定位系统来讲,其获取的原始数据为大地坐标参数,而后续参与运算的数据应为地面坐标参数,故在此之前应做数据转换处理。将GNSS 定位数据转换为地面坐标数据之后,才可以与UWB 技术获取的测量数据进行整合。
1.4.2 标准地图制作
室内停车场地图的制作是实现地图的基本浏览、缩放、定位查询和路径规划等功能的关键步骤。系统采用ArcMap 画图工具,通过建立GDB 数据库,制作美观易懂的停车场电子地图。通过在终端上显示停车场平面图,实现人机交互的可视化,并在此图上标记人与车的位置信息和路径导航。停车场地图制作流程如图5 所示。
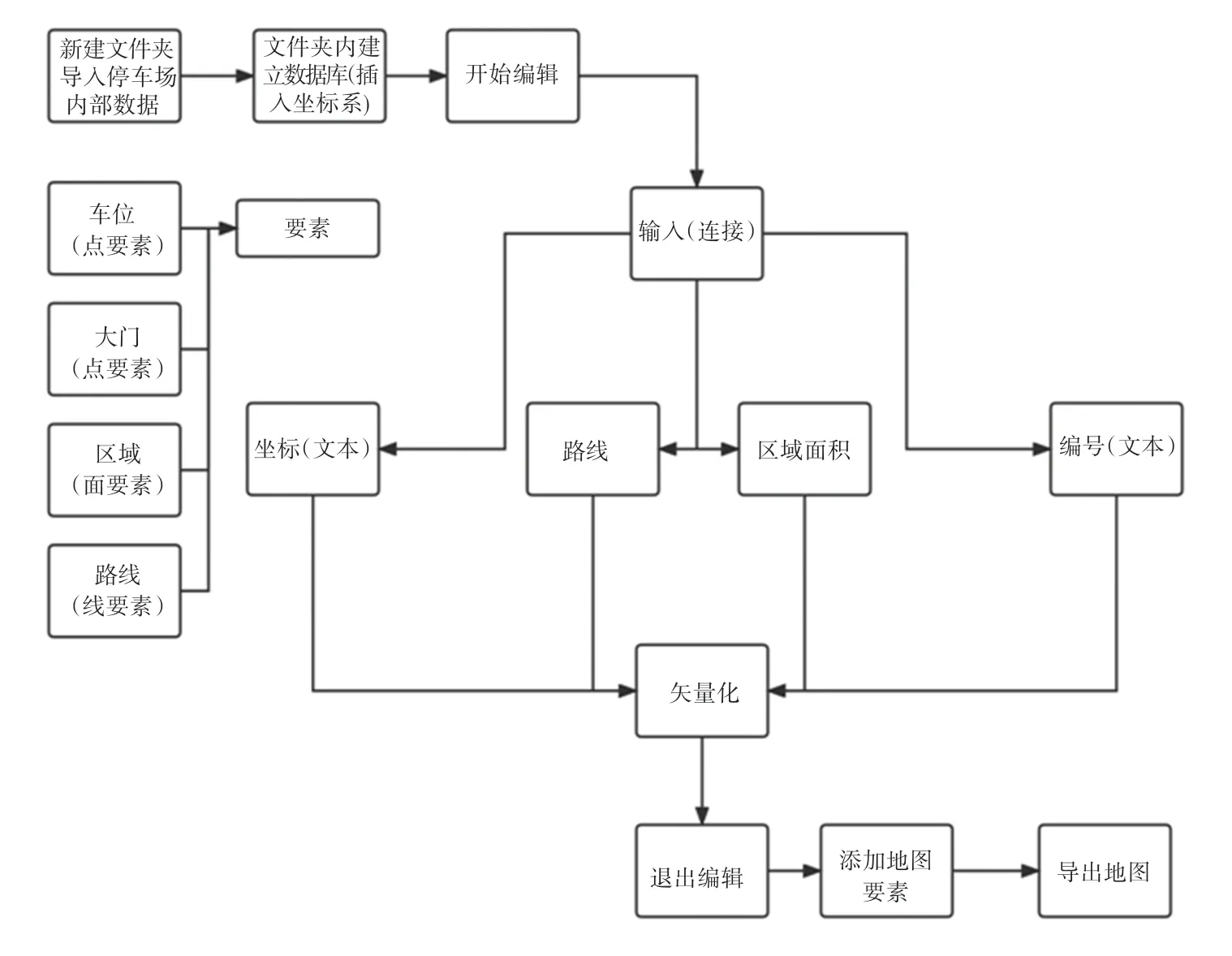
图5 停车场地图制作流程Fig.5 Map production process of the parking lot
1.4.3 数据库设计
在车主停车后,完成注册、进入系统,将用户信息与车辆位置信息一同存于数据库中,建立以用户信息为索引的车辆信息数据库。
对于数据库逻辑结构的设计,SQL 数据库中可以通过新建数据表并设定数据结构来建立适用于本系统的数据逻辑结构。数据表中,除了基本的管理信息表以外,还增加了诸如用户信息表、车辆位置信息等数据表。通过对数据库的操作,来管理用户信息、处理位置信息数据及用户请求信息等。此处主要包括着存储用户信息、实时位置显示、最短最优路径的查找等功能模块。
2 实验测试
2.1 静态标签测试实验
静态标签定位实验目的,是为了测试系统的定位准确度,有助于动态实验的运行完成。
测试实验地点选择在南京邮电大学南操场羽毛球场地,在3.48 m*3.48 m 的矩形范围内进行,实验场景如图6 所示。实验前先固定好基站0、1、2 的位置,上位机与基站0 连接并处于基站0 的位置。实验前设置好相对坐标系以及各基站位置,以基站0 为原点、基站1 为轴、基站2 为轴。位于矩形的3 个顶点处标签是可移动的,并在上位机中设定基站的坐标,建立坐标系。标签需要在基站信号范围内移动,同时基站标签处于同一水平高度,且基站标签之间并无遮挡物。

图6 各节点实际布局Fig.6 Actual layout of each node
将标签放置到指定位置,相对坐标为(2,1.2)。由于遮挡信号以及其它不稳定因素,导致上位机数据不稳定,待数据稳定后记录测量数据为(2.058,1.218)。将测量数据与真实数据相比较,至此得到该设备的精确定位。
实验表明,在无遮挡物且同一水平高度的情况下,可以显示标签相对坐标点及标签到各基站的距离。将真实数据导入Matlab 作图、且与测量数据做比较,对比结果如图7 所示。由此可见,测量数据与真实数据基本一致,说明该系统的定位准确度是真实可靠的。


图7 观测与真实坐标对比结果Fig.7 Comparison results between observation and real position
2.2 动态轨迹测试实验
本系统设计旨在为用户提供地下停车场的实时位置,以及规划停车、取车的最优路径服务。为验证UWB 技术在室内实时定位的可行性,在静态标签测试实验后,进行了动态轨迹测试实验。实验场地选择在南京邮电大学学科楼地下停车场5.5 m*13 m的矩形范围内进行,实验场景平面示意如图8 所示。实验前设置好相对坐标系以及各基站位置,以基站0 为原点、基站1 为轴、基站2 为轴,上位机与基站0 连接。标签需要在基站信号范围内移动,且与基站标签处于同一水平高度,基站标签之间无遮挡物。

图8 实验场景平面示意图Fig.8 Schematic diagram of the experimental scene
标签以及各基站上电后,一名工作人员手持标签且与其它基站保持在同一水平位置,按照从基站2 位置到基站0 与基站1 中间位置,再回到基站2位置路径移动。上位机与基站0 连接,得到标签与各基站间距离,并解算出标签在相对坐标系下的坐标,通过Matlab 得到的最终实验结果轨迹如图9 所示。由于本实验设置为三基站二维空间,实验过程中标签要尽量和基站离地面的高度一致。
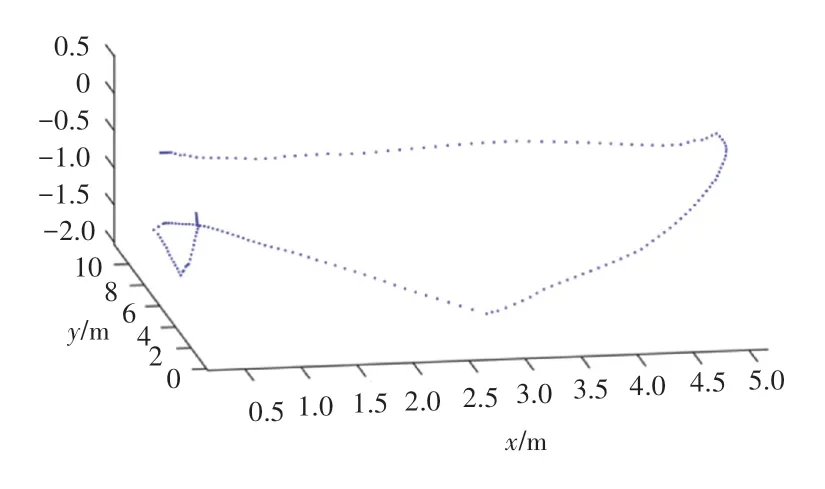
图9 实验结果轨迹图Fig.9 Trajectory of experimental results
由实验结果可见,标签挪动时,轨迹与实际路线相接近,说明UWB 技术可实现室内的实时定位,证明了本系统设计的可行性。
3 结束语
本文针对人们进入地下停车场泊车与返回取车时无法快速和准确地找到车位的问题,提出了基于UWB 定位技术的车辆定位系统的设计方案,即通过UWB 室内定位技术实现车辆定位与车位导航。经过对其进行实地静态与动态测试实验,所得结果表明,定位精度良好,且随着标签的移动,上位机能够实时地显示标签的相对位置,验证了UWB 技术在室内实时定位的可行性。本系统有广泛的市场应用前景。在UWB 室内定位技术基础上,与移动终端相结合,为用户提供了室内停车场引导服务,进一步扩大了地图导航的服务范围,进而由室外大场景地点导航拓展到室内定位点导航领域中。
然而定位的高精度是研究的关键,目前看来本系统在室内定位精度有待提高,且定位范围在百米内,定位区域较小。在今后的工作中,考虑在上位机中加入卡尔曼滤波算法来减小测距误差,并尝试切换到更大、更复杂的场景中进行实验。
猜你喜欢
电子制作(2018年9期)2018-08-04 03:31:18
车迷(2018年12期)2018-07-26 00:42:22
探索科学(2017年4期)2017-05-04 04:09:47
中国老区建设(2016年3期)2017-01-15 13:53:26
电子制作(2016年15期)2017-01-15 13:39:21
山东工业技术(2016年15期)2016-12-01 05:31:14
少年博览·初中版(2016年11期)2016-11-30 05:02:05
中国交通信息化(2016年8期)2016-06-06 03:56:25
移动通信(2015年17期)2015-08-24 08:13:10
学习月刊(2015年3期)2015-07-09 03:51:04
