
基于多信息融合的汽车电子系统故障诊断技术
2022-07-28 02:01:58李华庆
汽车电器 2022年7期
李华庆
(吉利汽车研究院(宁波)有限公司,浙江 宁波 315336)
随着技术的发展,汽车应用功能逐渐复杂化,汽车传统内饰也逐渐被智能化内饰所替代,需要高效的诊断能力。相关研究人员要加强对相关技术的研究,丰富故障诊断方法,总结诊断技巧,解决诊断中出现的故障问题,保证汽车长期正常使用。
1 信息融合技术原理
1)多传感器形成了不同的通道信号。汽车电子的故障诊断系统整体发展规模大,且具有一定的复杂性,需要的传感器种类和数量也比较多。因为不同的传感器组合可以为不同种类、不同位置的器件提供信息。传统的故障诊断技术仅仅是通过对一种或多种状态信息的分析,来获取机器的特性。尽管有时通过一种信息来判断机器是否有问题,但是在很多情况下,所得到的诊断是不可靠的。要实现对设备的正确、可靠诊断,必须从多个角度获取多维的数据,并将其综合应用。
2)同一信号形成了不同的特征信息。在对汽车故障实际诊断的时候,由于故障的产生原因比较复杂,各个类型的故障也是不同的。比如,不平衡、不对中、轴承座松动、转子径向碰撞等都会使转子产生不正常的振动。所以,转子的振动信号中的特征信息比较多,将其充分结合能够保证故障的有效诊断。
3)故障诊断中的不确定性。因检测对象的不确定性、系统噪声、传感器的测量误差等因素,使得系统的数据往往不完整、不准确、不明确,有时还会出现自相矛盾的情况,这就意味着存在许多不确定性。使用Dempster--SJafer(D-S)证据理论能够对故障诊断中的问题详细解决。
2 信息融合方法
1)基于统计的融合方法。主要包括的内容为经典推理、贝叶斯法和证据理论(D-S)法。传统的推理技术依靠数学原理,虽然其优势已为人所熟知,但是在进行多变量统计时,需要有一定的先验知识,并进行多维概率密度函数的计算,这是一种局限性。此外,它还有一个缺陷,那就是它只能对两种假设进行回溯,当数据多变量时,它的复杂性会大幅增加,所以,在能够获得需要信息资料的情况下就可以使用该方法,但一般在信息融合的时候使用该方法就比较少。贝叶斯推理技术在一定程度上克服了传统推理中的难点,但是其不足之处在于要确定先验似然函数,是一件非常困难的事情。当多个可能的假定或多个与情况有关的事件发生时,就会变得非常复杂,需要对立的假设互相不相容。一般在实际利用的时候该方法很少使用,而D-S证据理论是对贝叶斯理论的逐渐拓展,为其应用提供重要条件,能够有效解决基于人的推理模型不确定性分布问题。在多证据情况下,利用概率区间与不确定区间来确定假定的似然函数,并可求出任意假定为真实情况下的似然函数值,所以实际情况下有很大的推广价值。
2)基于信息论的融合技术。其存在的部分主要为模板法、聚类分析以及神经网络,这些技术在自然和对象方面都存在一些共性特征。聚类分析是一种综合的方法,其本质上不采用统计学原理,而采用一套已知的生物科学和社会科学中的启发式算法,将其分成若干自然组或集合,然后将其与预期对象的类型关联起来。模板方法是将观察到的资料与已知的模板进行比对,以判断观察资料是否能支持由模板所描述的假定。利用神经网络输入向量能实现非线性变换,通过向量的输出也能达到神经网络数据的有效分类。因此,可以使用人工神经网络对多个传感器的数据进行综合描述。虽然该方法在实际应用期间与聚类分析方法比较相同,如果在有噪声的情况下,该方法的作用更显
著[1]。
3)基于认识模型的信息融合。该技术在实际应用期间,主要是在模拟期间利用多种传感器形成识别过程,如:逻辑模板法、基于知识或专家系统等。可以通过专家系统或知识库系统进行更高层次的推理,然而,专家系统的特点是依靠主干知识的表达,因此它具有很大的灵活性,可以通过数字、符号和推理等特点来表达,所以,要对信息融合专家系统进行设计,但期间也比较困难。模糊集理论是一种全新的技术,目前已有许多商业软件支持模糊推理,但是它的价值以及应用于信息融合的模糊逻辑还有待进一步的探索。模糊集理论已经在国外开始研究,重点分析不确定事件。逻辑模板方法在实际应用过程中,是基于逻辑的识别技术产生的,随着广泛应用,多个传感器信息融合、单个信息特征分析都将发挥重要作用。
3 多信息融合概述
多信息融合的基本原理,也就是所谓的数据融合,就是按照特定的融合规则,模仿人类对信息的加工,从而对信息进行空间和时间上的补充。在确保数据一致性的前提下,充分发挥多元化的优点,以获取有价值的决策信息,加强结果的准确性。在对多信息融合方法实施验证期间,基于信息论,假设μ={μ,μ,…,μ}为发动机工作条件设置,P=p{μ=μ}代表发动机的操作条件的可能性。熵J是发动机工作条件下的不确定状态μ,主要的表达公式(1)如下。

假定诊断信息集合由t∈{t,t,…,t}表示,且已知t=t,因此,可以按照发动机工作状态来计算条件熵,见公式(2)以及平均条件熵公式(3)。

经分析发现,在发动情况下,数值还是大于或等于条件熵J,当确定好发动机诊断信息t后,也能有效提升工作状态的不确定性。
4 硬件选择
4.1 振动器选择
1)压电片谐振式。用压电片接收振动信号,它具有更高的共振频率,通过增加压电振子的质量,达到减小共振频率的目的,采用弹性球形作为辅助材料,以减小共振频率,提高振动效果。
2)机械振动式。常规的振动探测方法,在振动发生后,弹簧球会在很长一段时间内产生减振,从而容易被探测回路探测。为了对输出端的阻抗进行分析,要基于阻抗值的确定转换为高阻抗。
3)微型振动传感器。该传感器在实际应用期间,主要是利用机械振动传感器完成的,加强对振动件的碳化和密封,以保证整个工作的性能和可靠性逐渐增强。该输出切换信号直接与TTL或MCU的输入线路相连,具有很好的结构。其获取的输出阻抗更高、其中的静电流也比较低。
4.2 正确选择温度传感器
根据对温度传感器特点的分析,使用热敏电阻温度传感器,能获得更高的灵敏度,且温度系数较大,能快速反应,在汽车中的应用十分广泛。对于热电偶式温度传感器,对很小的温差能有效测量,且对温度的测量范围广泛,其中的温度可以达到1800℃。但是,需要注意到要保证一定的冷端温度,所以应用到汽车中比较少。
4.3 气体传感器
1)氧气传感器。在汽车上的使用,一般主要为氧化锆氧传感器、氧化钛氧传感器。中国实际应用期间,大多数的汽油发动机电子控制系统中,只安装了一个氧气传感器,基于三元催化转换器都能在上游、排气管中实现。
2)一氧化碳传感器。目前已有工业应用水平的CO传感器有三大类:MOS型、电化学固体电解质型和电化学固体聚合物型。例如:催化剂燃烧型、场效应晶体管型等,在临床上的应用少。
5 发动机故障诊断模型
多信息融合技术的使用,是按照数据处理方面构建发动机故障诊断模型,并在该模型的应用条件下,予以数据融合层、特征融合层和决策融合层的划分。根据故障来源的多层次分析,依据特征分类的思路、设计决策、数据融合、特征融合等多个层面进行信息处理。
5.1 数据融合层模型
从实际上看,在对发动机故障实际诊断的时候,能按照运行的参数对其识别和分类。数据融合型存在的故障类型比较多,一般使用物理模型诊断还比较复杂,所以适合使用BP神经网络,经BP神经网的应用,能达到信号的有效传播,也能对系统故障详细判断。BP神经网在进行识别、分类中获得的储存量更大,所以,要为其构建一种多输入多输出模型,保证在期间进行更为准确地学习。
神经网络的组成部分为输入层、隐藏层和输出层。其中的输入与输出结构比较简单、单一,要分析节点数目,需要对应用的特点详细分析;关于隐藏层的层数,很多学者从理论上进行了分析,结果表明:只要隐含节点数目足够,单隐层结构就能使非线性函数近似变得简单。
BP神经网络在学习中,主要传输为前向传播和误差反向。在正向传输阶段,将输入层的采样资料传送至隐藏层进行运算,然后由BP网络在输出层得到计算的结果;如果发现网络计算结果数据信息和希望的结果差异较大,也不符合一定的设计标准,BP网络就会在下一个步骤完成工作,不会给网络培训计划造成很大影响。
5.2 特征融合层模型
在特征融合层面上,首先要对采集到的信息进行多维地提取和压缩。接着,把这些数据作为一个输入,以进行更高层次的故障诊断,特征融合层算法也称为SVM,与神经网络相似。SVM采用了与故障模式相对应的特征数据,而不要求诊断规则提供更少的数据,但是具有更多的特征大小。
SVM理论假定存在一个样本集 {(t,f),(t,f),…,(t,f)}t∈R,f∈{-1,1},其中,1为 样 本 数,D为样本数 的 特征,f为样本模式。假设只存在两个属性值:超平面J(ωt+b=0,f=1),超平面的平行平面J,J,ωt+b=0,f=1,而超平面J,ωt+b=0,f=-1。
5.3 决策融合层模型
从数据层面和特征层得到的诊断结果是不可靠的,这就导致了一些故障需诊断。经过数据融合层、特征融合层诊断结果的分析,保证诊断准确性和可靠性的提升,也能给决策融合层提供重要条件。在该条件下,需要按照D-S证据的决策融合算法来实现。
D-S证据理论是基于证据可信度m(A),详细分析,通过总体判断能获得有效结果。增强其可靠性,就是对已有命题A的信赖程度。也就是说,通过计算,分析对象具备的客观性、个人主观性等,都能将其放入到适合的框架范围内,如μ,是问题的每一种可能的答案,其中的内容是相互制约的,能予以该框架的详细识别。将m:2μ→[0,1]设定为在识别架构中的基础可靠度分布。在D-S证据理论中,用区间来表达任意假定的支撑,这个区间的下限叫做置信度函数,其定义见公式(4)。

6 诊断技术试验
利用故障模拟器对传感器的偏置故障和漂移故障进行模拟,其中包括:传感器信号的正常、偏压、下偏、延时以及信号的电压损失。表1中列出了详细的模拟实验方案。VCI是车辆的连接接口,它能在CAN和PC间进行数据的传送。
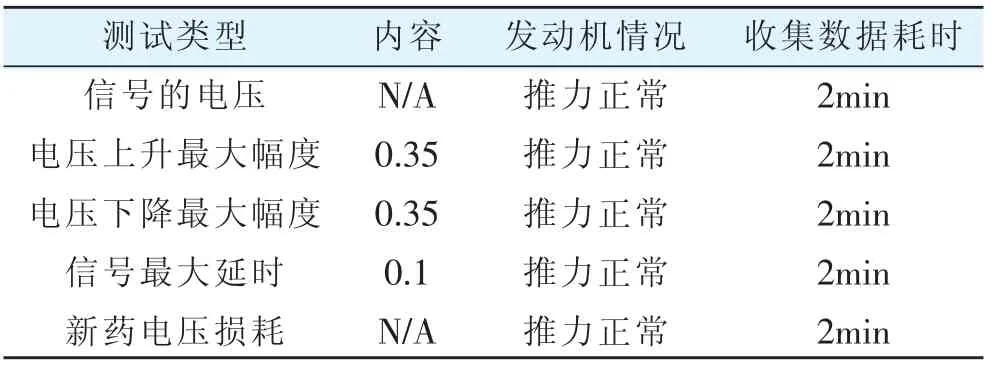
表1 模拟实验方案
通过对不同样本量的网络故障诊断结果进行对比分析,发现当检测和训练样本的比例是一样时,样本数目越多,故障诊断的精度就越高。然而,附加代价就是要求测试流程具备大量的培训时间,具备不同样本量的BP神经网络的故障诊断结果,如表2所示,其中序号为二进制编码。
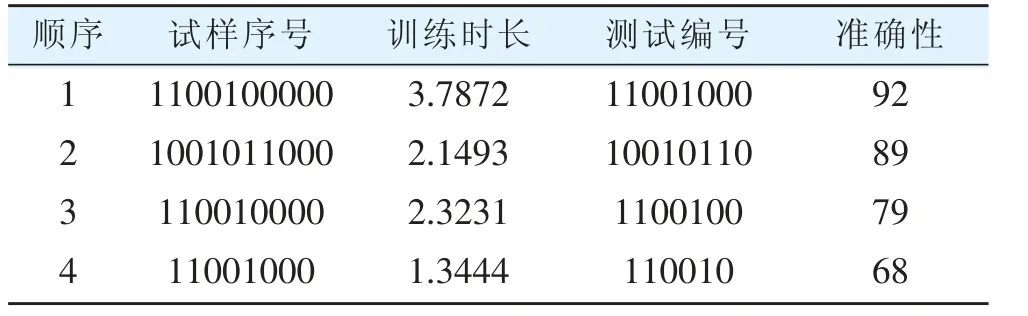
表2 实验结果
精度计算见公式(5):

式中:A——诊断结果的精确度;N——测试样品的正确识别数目;N——全部测试样品的数目。
在建模过程中,特征层诊断需从模型中抽取出特征向量。传感器的试验资料是从CAN总线中采集的,取样频率是固定的,没有频率分量。因此,时域法适合特征的提取,特征向量参数可以按照维度进行归类,维度参数的对差是敏感的,无量纲参数的对方差则不敏感。将上述优势与数据相关性的特点相结合,选取了7个参数视为特征向量,其中包含了维数参数和无量纲参数。
实验证明,分类精度达到85%,测试验证的时间达到了0.00907s,与数据融合、特征融合技术相比较,具有较快的诊断速度和较高的准确率。
7 结束语
综上所述,当前汽车故障诊断离不开故障模型的分析,相关人员要了解信息融合技术的原理,进而提高诊断效率,实现多信息融合。在维修过程中,选择符合实际需求的硬件设备,合理利用故障分析模型,提高诊断效率,在经验积累中实现技术突破。
