变电站无人机自主巡检系统的设计应用*
2022-07-25 03:00马成龙
机械研究与应用 2022年3期
陈 宇,马成龙
(国网酒泉供电公司,甘肃 酒泉 735000)
0 引 言
当前变电站复杂环境的巡检主要依赖人工巡检,部分场景也有应用巡检机器人巡检、视频布点监控、人工操控无人机巡检等传统巡检方式。传统巡检方式难以满足未来运维发展的需要,主要问题表现在以下几个方面。
(1) 人工巡检:变电站设备众多,电结构复杂,除非运维经验相当丰富的运维人员,否则很难将大量零散的、来自于各个系统的状态检测数据进行整理分析,并且难以有效地将分析结果与具体设备相对应,高处设备如避雷针、构架等外观缺陷从地面视角难以发现。
(2) 机器人巡检:巡检机器人在一定程度上可以代替人工完成部分巡检工作,但对现场的条件要求较高,涉及到修路、道路及围栏改造、修建充电房等一系列土建改造,其移动速度慢、效率较低、视角有限,特别是在变电站高处存在较多盲区。
(3) 视频布点监控:主要用于对某些重点设备或区域进行定点监控,但其视野相对固定,主要覆盖较低位置的巡检对象,高处设备难以覆盖,布线安装复杂及维护不便。
(4) 人工操控无人机巡检:手动控制无人机在变电站内巡检对飞手的熟练程度要求高,且基本限于外围拍摄,应用于巡检功能有限。
针对上述传统巡检方式的盲区,重点对全方位自主巡检系统进行设计,通过建立变电站无人机自主巡检系统,降低人工巡检成本,提高巡检的自动化与智能化水平,覆盖传统巡检方式盲区,为智能变电站与无人值守变电站的发展提供创新型低空巡检技术,对于推进智能电网自动化建设有积极的作用。
1 无人机自主巡检系统
1.1 系统简介
无人机自主巡检系统通过高精度三维点云为巡检自动规划路线,利用三维空间模型进行航线规划、航线安全校验,实现高精度无人机自动驾驶功能。按层级分为云、边、端三大部分。
(1) 云:中央管控系统,可集中调度自动巡检系统和无人机,制定并下发无人机巡检任务,对无人机巡检上传的数据进行管理、缺陷识别,实时查看无人机现场图像。
(2) 边:无人机自主巡检系统是实现无人机无人值守作业的智能装备系统(下文简称固定机场),具备支持无人机存储、自主化飞行、电能补充等功能模块,是实现无人机无人值守的关键组成部分之一。
(3) 端:携带巡检任务的RTK无人机。无人机能够接收云端下发的任务,按照任务规划进行自主安全飞行,采集巡检任务数据,并可根据业务需求支持搭载红外测温多种类型负载。
1.2 通信链路
无人机数据通过2.4 GHz/5.8 GHz专用遥控器链路与遥控器进行通讯。通过固定机场实现无人机的全自主巡检,一方面将无人机采集数据传回管控平台进行存储、分析,另一方面通过管控平台查看实时图传、发送控制指令。
固定机场作为信息的中转站,用于无人机的起飞、降落、回收、储存、充电场所,同时用于飞机的通讯、数据的储存与同步、状态推送与命令接收、气象数据监测等。
无人机的巡检数据传输链路主要分为两部分:无人机到机场、机场到中心端。如图1所示。
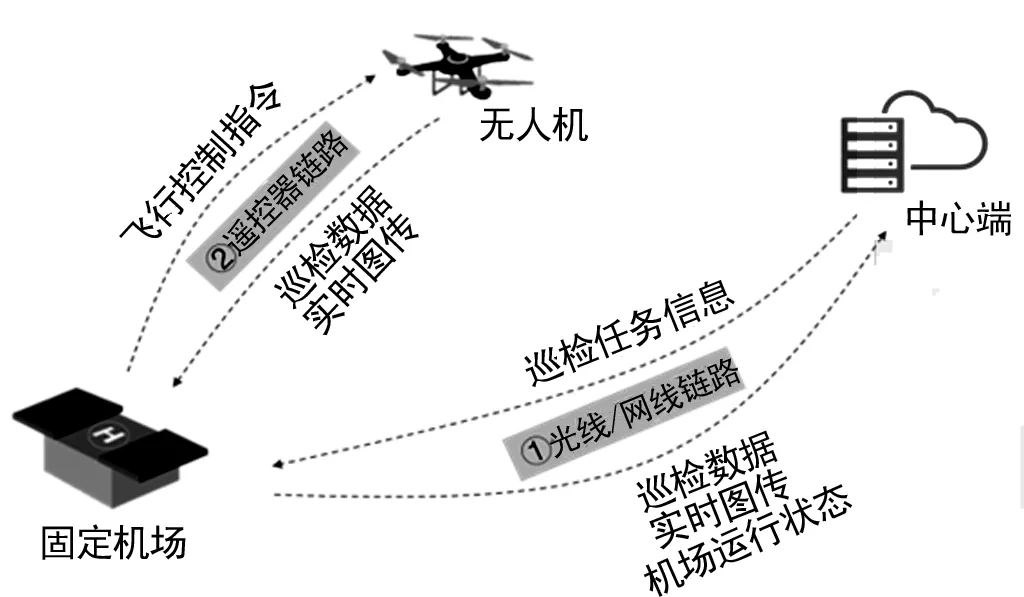
图1 数据传输链路
(1) 机场到中心端:机场与中心端通过有线网络(光纤/网线)链路实现数据连接,主要进行任务信息、无人机巡检数据、无人机实时图传、机场状态的传输。
(2) 机场到无人机:采用无人机专用遥控器链路实现飞机与遥控器间的专用通讯链路,遥控器安装在固定机场内,主要用于传输控制指令、实时图传与巡检数据。
1.3 硬件配置
固定机场作为无人机的存储单元及载体,通过接受中心平台远程下发的任务,控制无人机进行自主巡检、返航、回收、充电、数据上传等流程。具有可连接中央管控系统与固定机场各设备的网络通信模块、可处理无人机任务数据的机场服务器模块、可为无人机提供起降场地的机电模块、控制无人机自主执行巡检任务的无人机地面站模块等。
无人机系统无法在大风大雨中工作,且单次执行任务的续航时间有限,因此需要固定机场具有可判断无人机飞行环境安全的环境检测模块、能为无人机进行电量补充以实现连续作业的电量管理模块。
固定机场长期在户外放置运行,需要自身壳体具有一定的防护等级,以保证整套系统的长时间安全运行。同时机场要适应变电站强电磁干扰,需要对本体进行防电磁干扰设计,保障系统作业完全。
自主巡检系统是一个多模块融合的集成系统,各模块需要达到一定功能要求才能保证整套固定机场系统可稳定运行。因此在固定机场的研发工作具体实施中,需要采取先模块、后集成的研发流程。
1.4 巡检流程
固定机场会接收管控平台下发的任务,并进行任务信息存储。执行任务前,环境检测模块会对机场周围环境进行测量,若周围环境满足飞行条件,机场服务器会将固定机场唤醒,并释放无人机执行任务。完成任务后,无人机会自动返航,固定机场回收无人机。等待无人机任务数据完全传输至机场服务器后,机场服务器会将数据上传至中央管控系统。此时电量管理模块为无人机进行电量补充,等待下一次任务。如图2所示。
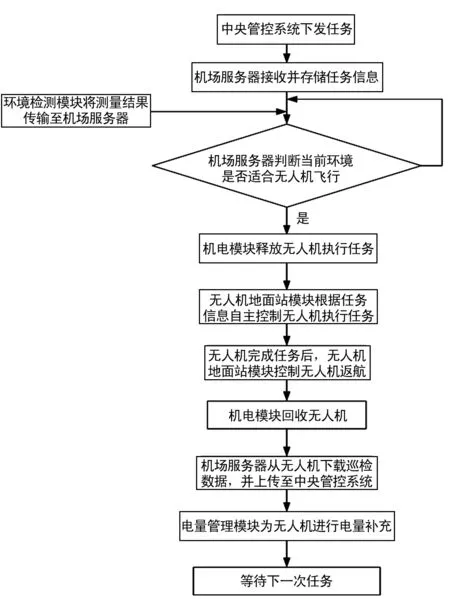
图2 巡检流程
2 巡检模式
巡检目标为变电站高空一次设备(构支架顶部结构、避雷针、主变顶部油枕/套管/油位等),以及变电站周边电杆塔,对区域内设备自动化巡视、故障点查找、巡检数据管理工作,并实现巡检工作全流程可视化,通过合理部署无人机固定机场、无人机、智能管控平台,执行对区域一次设备无人值守的智能化巡检任务[1]。主要包括以下要点:①避雷针、母线杆塔、绝缘子线夹等高空设备外观进行常规性检查;②检查高空设备否有鸟巢、风筝、塑料袋等明显异物;③开关刀闸分合状态,部分高空表计、互感器油位读数;④变电站周边环境、施工情况巡查;⑤变压器、互感器、开关设备等本体及套管、开关触头、引线接头、T型接头、绝缘子等否有发热情况。
不同巡检方式对比分析,如表1所列。
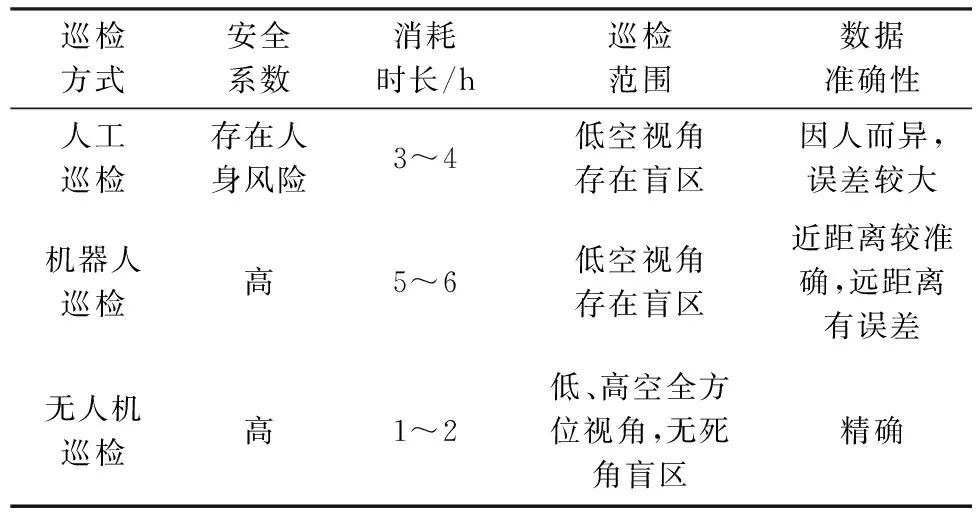
表1 常规330 kV变电站无人机巡检与传统巡检对比
根据变电站设备分布情况及巡检数据类型,规划巡检模式分为区域粗巡、定点细巡和安保巡逻三种模式:①区域粗巡:对变电站区域进行连续俯拍,检查是否有异物悬挂或放置与变电设备上。②定点细巡:精准地对变电站内设备进行可见光或红外照片采集。③安保巡逻:对变电站区域进行安保巡逻,查看现场环境是否有人员停留、异物、违规堆放等问题,覆盖监控设备盲区。
3 自主巡检系统应用优势
变电站无人机自主巡检系统是一种具备较高智能化和自主化的软、硬件系统,对现状和技术发展的作用主要体现在以下四个方面。
(1) 基于云管理的固定机场自主巡检模式,提高巡检智能化程度。
在实际运用中,巡检人员在中央管控系统上可远程自定义巡检模式、巡检时间,同时可以远程启动和监视变电站固定式无人机智能巡检系统运行。几乎无需人工操作,实现无人机巡检区域完全自主飞行,巡检作业数据也会在完成巡检作业后回传至中央管控系统,便于数据规范化处理和储存,为后续大数据分析奠定一定基础。此种巡检方式相较于无人机普通自主巡检,巡检及时率更高,区域覆盖更具针对性,数据存储更具规范性,智能化应用更具前瞻性[2]。
(2) 极高的智能化和自主作业程度,无需人工直接参与,降低风险。
无人机的起飞降落及与固定机场的配合均由系统自主完成;固定机场能够感知外部环境并对无人机飞行的适宜性做出判断和反馈状态信息,同时能够实时监测机场内无人机电量,并进行自动充电;固定机场还具备飞机导航、定向双备份,并提供原路返回、低电压保护等多重安全措施,降低了操作风险。该套系统在技术上实现了由人工现场干预的无人机巡检向现场无人值守自动化的无人机巡检模式转变。机场具备异常处理自恢复逻辑,可实现现场无人值守化的无人机自动巡检工作。
(3) 研究多种自主巡检模式,拓宽无人机巡检业务范围。
基于固定机场实现多种巡检业务的研究,以自动化理论、倾斜摄影技术、从运动到结构(structure-from-motion,即SFM)算法、热成像原理为理论依据,以模块化设计、标准化设计为原则,实现基于可见光与红外数据的多种巡检模式的任务规划和自动飞行,满足电站设备例行巡检、精细化巡检和安保巡逻等多种巡检任务需求。
(4) 可视化巡检报告自动生成,无需繁杂的人工整理分析,巡检结果一目了然。
基于电气设备隐患的分析结果,结合标准的变电站巡检报告模板,自动生成巡检报告,支持一键导出,减少大量的巡检报告人工编写工作,巡检结果标准化。同时可在管控平台中可视化查看本次巡检发现的隐患,使得巡检结果一目了然。
4 结 语
结合分析变电站的环境特点,根据对应场景的巡检相关技术要求和操作规范,研究基于无人机技术、无线传输技术、自动化控制技术、数据管理技术等先进技术于一体的智能巡检系统。系统不依赖人工现场作业,通过平台制定下发任务指派无人机自动执行巡检任务,自动完成无人机起飞、巡检、降落、回收、充电、数据上传等步骤。不断提高变电运维标准化、精益化和智能化水平,从而向更智能、更高效、更安全方式转变[3]。
猜你喜欢
军事文摘(2022年8期)2022-11-03
移动通信(2021年5期)2021-10-25
小学科学(学生版)(2021年3期)2021-04-13
哈哈画报(2021年11期)2021-02-28
中国交通信息化(2020年11期)2021-01-14
空间科学学报(2020年3期)2020-07-24
电子制作(2019年20期)2019-12-04
电子制作(2019年10期)2019-06-17
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05