
基于倾斜摄影测量的城市三维实景建模
2022-07-25 07:26徐晶晶
辽宁自然资源 2022年6期
徐晶晶
(辽宁省基础测绘院,辽宁锦州 121003)
近年来,随着实景三维模型的提出,人们对三维建模的认识越来越深[1]。三维模型的应用在人们的日常生活中极为普遍,比如旧城改造、智慧旅游、智慧交通、智慧城市、游戏人物、游戏场景还原和3D电影等,三维模型发挥着巨大的作用,也给工程项目带来了极大的方便[2-3]。城市三维实景模型重建利用无人机搭载的5个不同角度的镜头获取多视影像,通过IMU/GNSS获取POS数据,利用RTK实时动态测量技术获取控制点数据[4]。传统的摄影测量只能按照垂直角度对物体、地形进行拍摄,获取的正射影像只有极少部分的侧面信息,而倾斜摄影测量利用无人机搭载五镜头像机在同一时刻能获取多角度地物信息,得到地物丰富的侧面纹理信息和超高分辨率的影像[5-6]。
当今的三维建模效率大概在8千米/(人·天),是人工建模的400倍,其中,利用Smart3D自动建模是目前主要研究方向[7]。Smart3D是一款功能丰富的三维建模软件,从简单连续影像中无需人工干预生成逼真的实景真三维模型,具有高效、快捷、智能的特点。本文在介绍倾斜摄影测量主要技术的基础上,以某市三维建模项目为例,探讨基于倾斜摄影测量数据采用Smart3D软件生成实景三维模型的方法。
一、倾斜摄影测量主要技术
1.数据采集
(1)基于空中平台数据采集
倾斜摄影通过在同一平台搭载多台传感器,同时从垂直、侧视等不同的角度采集影像。倾斜摄影测量的本质是通过大气将地表特征和地貌信息传送到像机的物镜和航空摄影底片上[8-9],航空底片不仅记录了地面特征、地貌特征和地面特征之间的关系详细,还记录了像机在拍摄瞬间装载的各种仪器的信息。
(2)地面控制点采集
在进行空三加密前需要对航摄影像进行刺点以获得精确的外方位元素。倾斜摄影测量的控制点刺点与传统影像的刺点有所不同,需要在5个方向的影像上进行刺点,因此在选择控制点时对通视的要求较高[10]。控制点的获取有两种方法,分别是GNSS静态测量和GNSS RTK动态测量,本项目设计采用GNSS RTK实时动态测量技术获取地面控制点。GNSS RTK由移动站、基准站和无线电数据链组成,基准站通过无线电数据链向移动站发送载波相位观测值和测站信息,移动站接收卫星和基准站的信号,通过数据处理模块计算出移动站相对于基准站的坐标增量,通过坐标增量确定移动站的位置。所以,接收机能够一边进行数据采集,一边立刻解算并输出定位结果。
2.数据处理
(1)SIFT特征提取
SIFT特征提取方法是对尺度空间的高斯差分函数进行曲线拟合,以提高特征点的稳定性[11]。此阶段的影像匹配可理解为粗匹配或稀疏匹配,主要是为推算影像之间的连接点,得到每一个像素点的位置。SIFT特征提取时,首先需要统一固定斑点的大小,即改变尺度图层的大小,以便实现特征提取和比对。检测图像中的特征点,实质上是在不同尺度空间中寻找特征点,并计算特征点的方向[12],通常是以一张像片的某一特征点为基准查找与另一张像片对应的同名点。
(2)构建影像金字塔
构建影像金字塔能很好地解决图像特征的尺度不变性问题,可以高效地提取不同尺度的特征,并且在时间复杂度和空间复杂度上只是常数的变化[13]。图像金字塔是由多个不同分辨率来解释图像的一种方法,其特点是有利于图像在缩放和移动的过程中快速显示[14]。
3.多视影像联合平差
对获取的多视影像采用光束法区域网联合平差技术进行平差,以解决部分地区的遮挡问题和影像之间的几何变形[15]。根据金字塔匹配策略,对每一层影像都进行联合平差,再根据POS系统自带的数据进行同名点匹配,建立点线之间的误差方程。通过联合平差能得到更为精确的匹配结果,获取高精度的外方位元素。考虑到倾斜影像中的地物变形和遮挡问题,多视影像联合平差可通过多匹配基元的冗余信息进行修正[16]。
二、基于倾斜摄影测量的建模方法
本测区的地形为平地和丘陵,地表植被覆盖较少,便于航空影像数据的获取。本文选取有代表性的区域对基于倾斜摄影测量的建模方法的可行性进行验证。试验采用P550无人机搭载睿铂D2数码像机进行航空拍摄,根据比例尺、主距确定合适的航高,根据测区规划航带数量,最后获取影像。获取影像的水平分辨率是350DPI、垂直分辨率是350DPI、影像分辨率是6000×4000个像素,分辨率单位为2英寸(1英寸≈2.54厘米);相对航高120米,航向重叠率85%,旁向重叠率70%,飞行航带10条,共获取了2830张像片。试验中,利用无人机获取倾斜影像,并在近地面环绕建筑物四周获取建筑物的侧面纹理信息。
建模方法:首先,通过倾斜摄影测量技术获取多视影像,采用RTK实时动态测量技术采集控制点坐标;其次,利用POS数据与多视影像进行空三加密,主要采用光束法区域网平差,解算姿态信息,再利用姿态信息确定影像之间的连接点从而确定影像之间的关系;再次,采用多视影像密集匹配方法生成地物超高密度三维点云,构建TIN模型,基于多视影像全自动提取纹理信息,生成三维模型;最后,将实地获取的控制点及地物点数据与基于三维模型获取的数据进行对比,评估三维模型的精度。
1.光束法空中三角测量
(1)空中三角测量
目前空中三角测量主要指解析空三测量,它是摄影测量内业测图和数字成果生成的第一道工序,其核心内容是以像片上的像点坐标为依据,用摄影测量的方法求解测区中所有影像的外方位元素,并基于摄影过程的几何反转,重建可量测的几何立体模型,然后解求出地面点的空间坐标。其中,构建空三加密区域网和联合平差等由Smart3D软件自动完成。为保证精度,刺点时至少需要刺3个以上控制点,且每个控制点至少刺在3张影像上,再进行空三加密,生成区域内的点云数据(图1)。

图1 刺控制点
(2)POS数据辅助空中三角测量
由IMU/GNSS组合的POS系统摆脱了倾斜摄影测量对地面控制点的依赖,利用POS提供的影像姿态数据和空间位置可自动确立影像初始关系[17]。对于没有POS数据的,如果一次性将大量影像导入Smart3D软件,就会出现内存不足而无法进行有序处理的状况,为了提高匹配的可靠性,可在数据处理前,通过特征描述得到同名像点,建立影像之间的几何关系,再自动完成匹配(图2)。

图2 空中三角测量成果
2.影像密集匹配,构建TIN白模
(1)多视影像密集匹配
多视影像具有覆盖范围大、分辨率高等特点,为了获取足够的同名点像对,生成超高密度的点云数据,需要进行密集匹配。匹配过程就是寻找连接点构网的过程,同时消除冗余数据。空中三角测量完成后,得到图像之间稀疏的特征点和图像的像机矩阵,利用高精度密集匹配软件Smart3D可以快速准确获取多视影像上的同名点坐标,进而获取地物的三维信息,自动完成匹配[18]。
(2)基于点云构建三角网
多视影像密集匹配可获取大量高密度的点云数据,利用点云数据生成TIN构建三维模型,其优点是容易表达复杂的拓扑结构和几何特征,而且算法简单,结果稳定。点云构建TIN模型的方法有很多种,如直接利用点云构建TIN模型或者利用三角网格对原始点云进行最佳逼近等。本项目采用直接基于点云数据按三维重建的密集算法进行TIN模型构建[19]。
3.实景三维模型生成
为了使生成的三维模型更自然、更贴近实际,真实地反映地物的纹理信息,需要对模型进行纹理映射。纹理映射的本质是坐标系之间的变换,建立三维物体表面空间点(x,y,z)与纹理空间点(u,v)之间一一对应的映射函数关系。在进行纹理映射时,Smart3D软件会自动计算TIN模型中的三角网格与影像的对应关系,然后将对应的纹理相关信息与模型中的三角网进行配准,再利用分辨率高的二维影像对所构建的模型进行纹理贴图,最后通过区块重建,生成实景三维模型(图3)。

图3 重建区块三维模型成果
4.精度分析
为了对基于倾斜摄影测量的建模方法得到的成果数据进行精度评估,可将实地测量的控制点坐标与通过三维模型得到的控制点坐标进行对比,计算模型的误差。本次试验在区域内布设了8个控制点,分别为道路交叉口、房角点、斑马线等明显地物点,利用这些点对三维模型的平面位置精度和高程精度进行评定(表1)。
从表1可知,基于倾斜摄影测量的建模方法构建的三维模型的平面位置误差和高程误差都在规范允许范围之内,完全能够满足精度要求。表明Smart3d软件的三维建模效果较好。
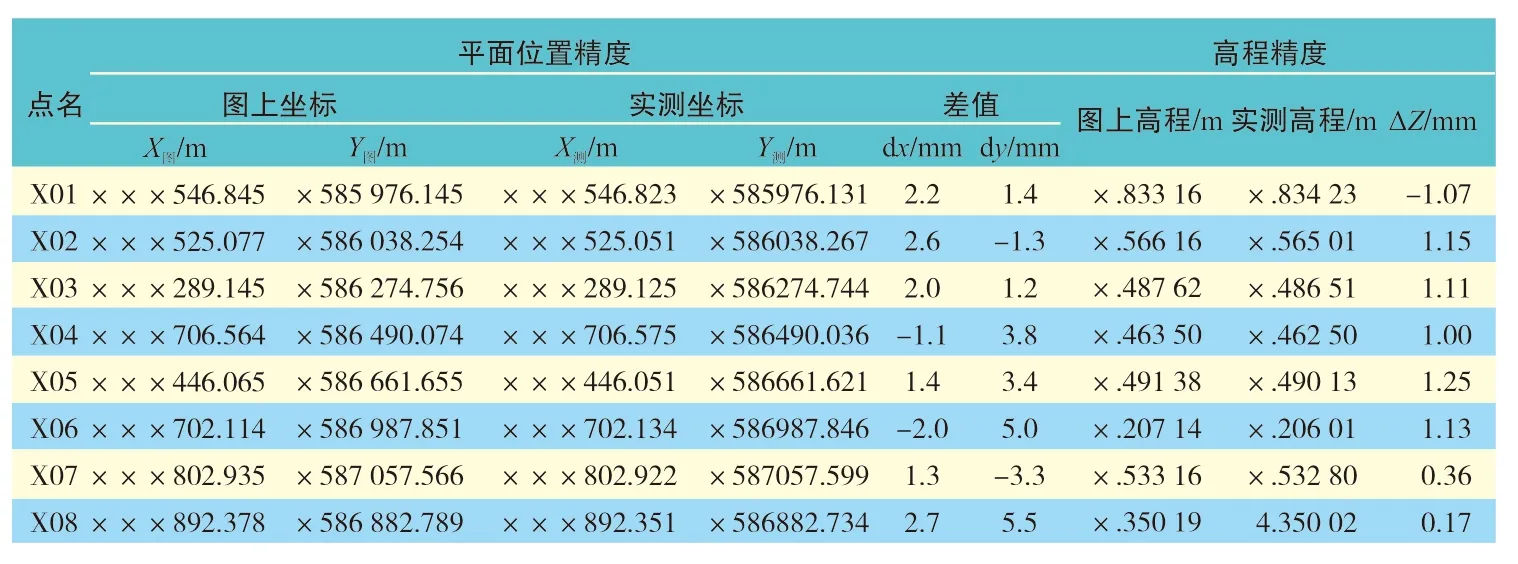
表1 三维模型的平面位置精度和高程精度统计
三、结语
随着城市化进程的加快,利用无人机倾斜摄影测量进行三维建模已经成为了一种主要技术,不仅能提高城市三维建模的效率,而且在降低成本的同时还能提高建模质量。本文将无人机倾斜摄影测量与三维建模技术相结合应用于城市的三维建模。通过对所建立的模型精度进行评估,结果表明,基于倾斜摄影测量的建模方法所构建的实景三维模型质量较高,完全满足三维建模精度要求。
猜你喜欢
全球定位系统(2022年1期)2022-04-14
科技信息·学术版(2022年3期)2022-02-21
现代企业(2021年2期)2021-07-20
全球定位系统(2021年1期)2021-03-26
思维与智慧·下半月(2021年3期)2021-03-25
华人时刊(2021年23期)2021-03-08
保健与生活(2019年7期)2019-07-31
小资CHIC!ELEGANCE(2018年33期)2018-11-08
Coco薇(2017年8期)2017-08-03
汽车之友(2016年15期)2016-08-23
