线导鱼雷攻击远距离舰艇目标影响因素分析
2022-07-25 03:51王顺杰朱伟良
火力与指挥控制 2022年4期
王顺杰,朱伟良,初 磊
(海军潜艇学院,山东 青岛 266199)
0 引言
线导鱼雷是水下平台使用的精确制导武器之一,通常只要有稳定的目标方位信息就可以实施线导鱼雷攻击。当使用线导鱼雷攻击远距离舰艇目标时,通常声纳测量目标方位存在一定的误差,方位误差的存在在一定程度上会影响线导鱼雷的使用,不同的方位误差导致线导鱼雷有不同捕获目标概率。实际上,线导鱼雷捕获目标概率的大小不仅仅取决于目标方位误差大小,还与目标的运动态势(速度、舷角)以及目标距离的远近相关,在使用线导鱼雷时,需要综合考虑各种因素的影响。
在一定方位误差条件下,分析目标运动态势和目标距离两个因素对线导加声自导鱼雷使用效果影响规律,可为线导鱼雷攻击远距离舰艇目标的使用提供一定的参考。
1 线导加声自导鱼雷控制模型
修正方位导引法、现在方位导引法是控制线导鱼雷最为常用的基本导引方法。
1.1 修正方位导引法
假设首先采用修正方位导引法对鱼雷进行初始导引,根据修正方位导引法基本原理,随着鱼雷远离本艇,系统将逐渐减小偏离角γ,其偏离角的计算公式为:

式中,D鱼雷航程,D为修正导引距离,γ为初始偏离角。
如图1 所示,执行修正方位导引时,W(t)为本艇当前位置点,L(t)为鱼雷当前位置点,B(t)为目标方位,B(t)为鱼雷方位。经过一个导引间隔Δt后,期望将鱼雷导引到滞后现在方位线γ 角度的方位线上,假设鱼雷航向线与滞后现在方位线γ 角度方位线的交点为L(t+1)。假设采用被动声自导鱼雷,当鱼雷有一定自导作用距离Rc 时,可令L(t+1)-L(t)=S+R每个导引周期鱼雷航向为:
图1 修正方位导引法示意图

式中,ΔB=B(t)-B(t)-γ,S=V·Δt,sign(LR)为目标舷别,右舷为“+”,左舷为“-”,R为鱼雷到本艇之间距离,R为鱼雷滞后于目标的距离。

当鱼雷航程等于修正导引距离时,偏离角为0°,此后系统控制鱼雷按照现在方位导引法进行导引。
1.2 现在方位导引法
如图2 所示,执行现在方位导引时,W(t)为本艇当前位置点,L(t)为鱼雷当前位置点,B(t)为目标方位,B(t)为鱼雷方位,经过一个导引间隔Δt后期望将鱼雷导引到现在方位线B(t)上,假设鱼雷航向线与当前方位线的交点为L(t+1)。假设采用被动声自导鱼雷,当鱼雷有一定自导作用距离R时,可令L(t+1)-L(t)=S+R。每个导引周期鱼雷航向为:
图2 现在方位导引法示意图
被动声自导鱼雷靠其自导扇面来发现目标,因此,若判断目标已落入鱼雷自导扇面内,即可判断鱼雷捕获目标。
2 仿真分析
想定条件1:本艇航向020°,速度4 kn,目标方位020°,目标舷角右舷30°~110°,目标速度16 kn~24 kn,射距50 cab,采用线导加被动声自导鱼雷,鱼雷平均速度40 kn,自导作用距离1 000 m,鱼雷扇面角±40°,目标方位均方误差3°。先采用修正方位导引法,鱼雷航程到达修正导引距离后转现在方位导引法。采用蒙特卡洛仿真,仿真次数1 000,当目标进入鱼雷扇面视为捕获目标。
2.1 目标运动态势对线导鱼雷使用影响分析
下页表1 为不同条件下鱼雷捕获目标概率统计表,图3 为根据表1 数据所画的不同条件下鱼雷捕获目标概率曲线图,表2 为不同条件下鱼雷捕获目标时的命中角平均值统计表。从表1 数据及图3 曲线图变化规律可以看出,在给定的仿真条件下:
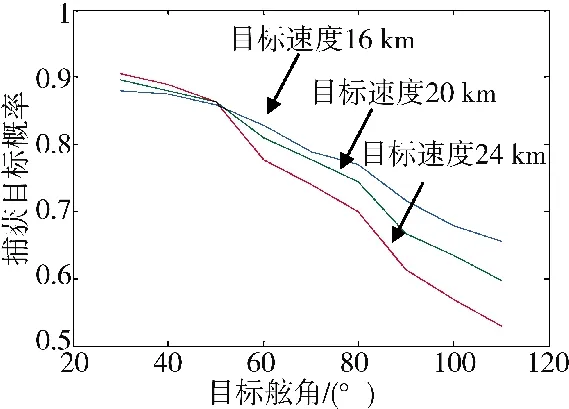
图3 不同条件下鱼雷捕获目标概率曲线图
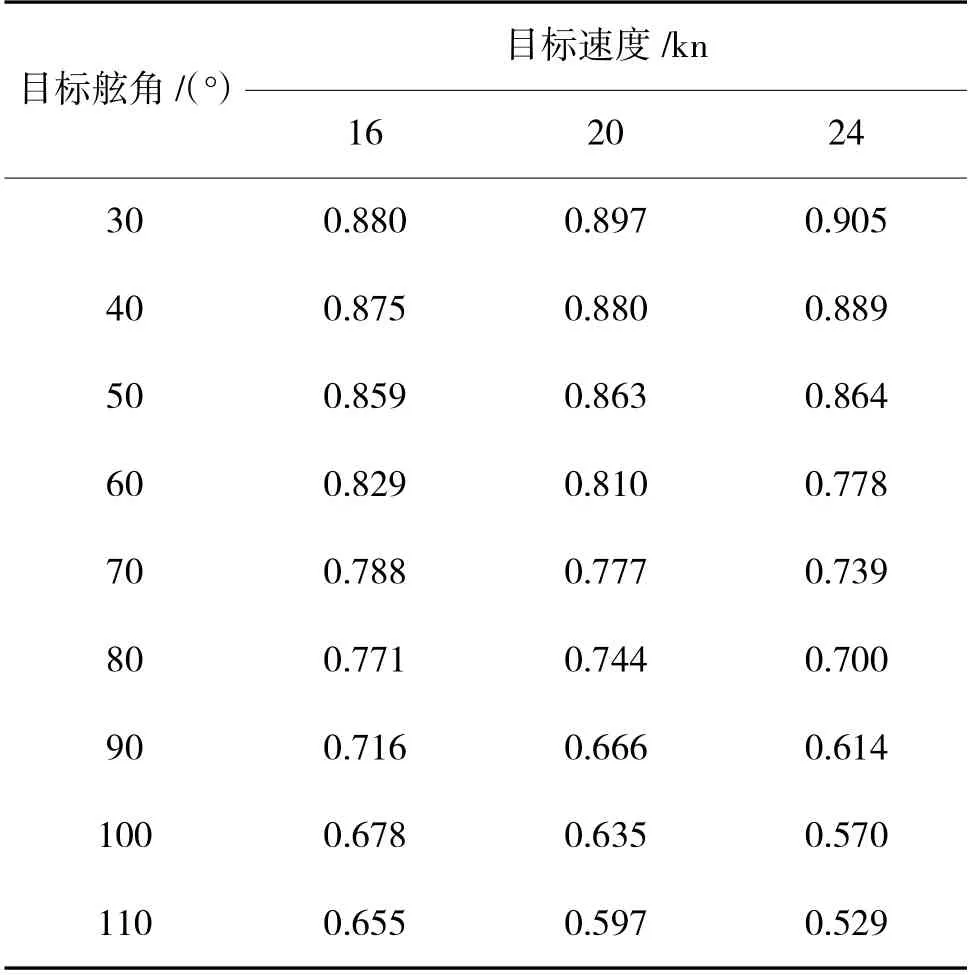
表1 不同条件下鱼雷捕获目标概率统计表
1)目标速度一定时,鱼雷捕获目标概率随着目标舷角的增大而减小,且减小趋势随着目标舷角的增大而增大。从表2 中可以看出,由于随着目标舷角的增大,鱼雷命中角不断增大,鱼雷和目标的相遇态势由迎击逐渐变为追击,鱼雷航行距离也就随之增加,由一定方位误差导致的横向距离误差也就随之增大。
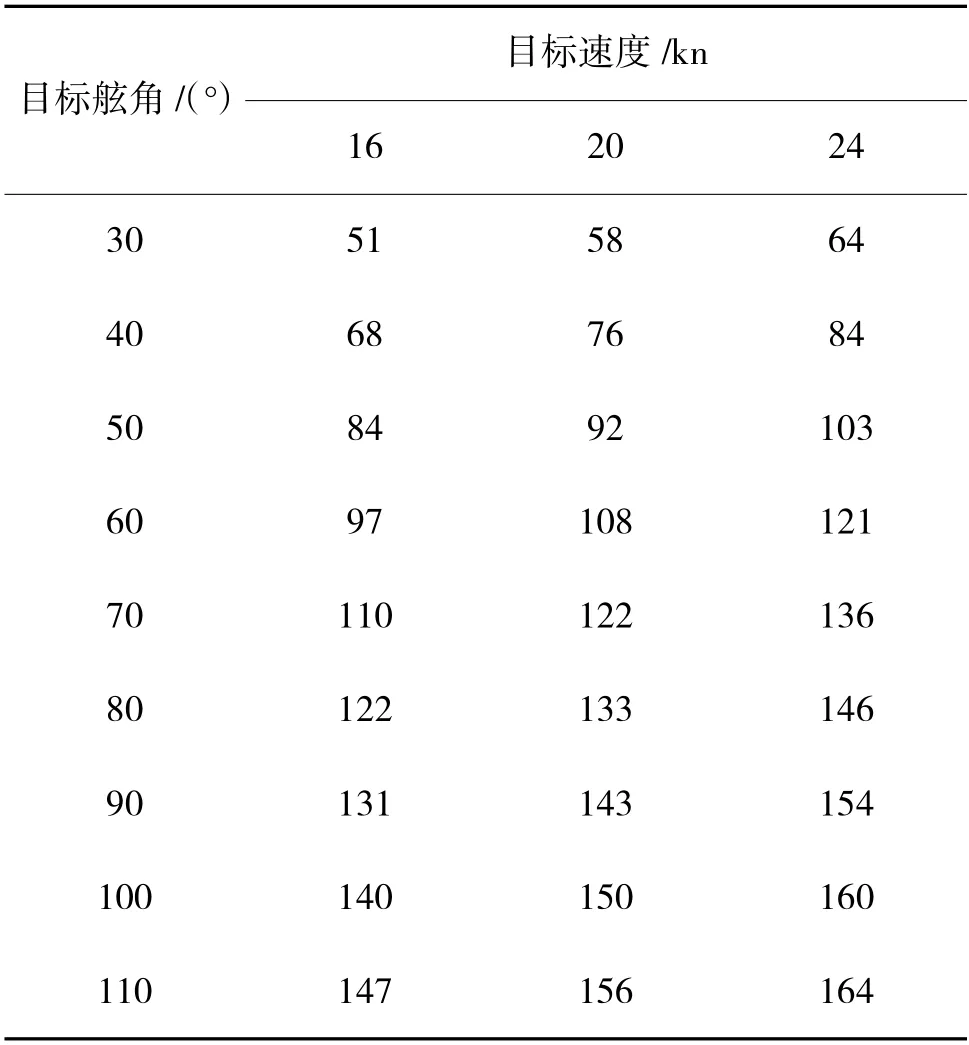
表2 不同条件下鱼雷捕获目标时的命中角平均值统计表
2)在一定目标舷角情况下,随目标速度的不同,鱼雷捕获目标概率变化规律有所不同。结合表1和图3 数据值,目标舷角从30 °~50 °的变化过程中,从表2 中可以看出鱼雷命中角从50°~90°附近变化,此时鱼雷捕获目标概率随着目标速度的增大而增大;目标舷角从60°~110°的变化过程中,从表2 中可以看出鱼雷命中角从90 °附近~164 °变化,此时鱼雷捕获目标概率随着目标速度的增大而减小。目标速度越大,当鱼雷和目标的相遇态势为迎击态势时,相当于减小了鱼雷航程,利于攻击,从而捕获概率越大;而当鱼雷和目标的相遇态势变为追击态势时,相当于增大了鱼雷航程,不利于攻击,从而捕获概率越小。
图4~图6 分别为目标舷角、目标速度20 kn,发射目标舷角30 °、50 °、100 °时的鱼雷攻击示意图,对应的鱼雷命中角为58°、92°、150°。

图4 目标舷角30°、目标速度20 kn 鱼雷攻击示意图

图5 目标舷角50°、目标速度20 kn 鱼雷攻击示意图
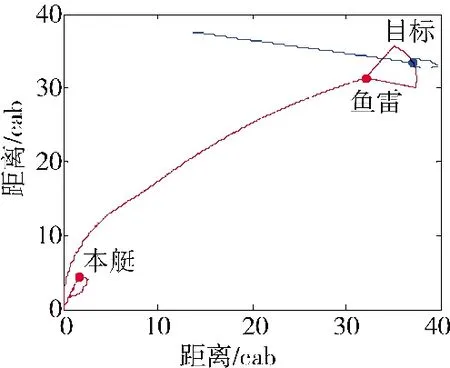
图6 目标舷角100°、目标速度20 kn 鱼雷攻击示意图
2.2 目标距离对线导鱼雷使用影响分析
想定条件2:本艇航向020°,速度4 kn,目标方位020°,目标舷角右舷50°,目标速度18 kn,射距50 cab~100 cab,目标方位均方误差大于3°,采用线导加被动声自导鱼雷,鱼雷平均速度40 kn,鱼雷扇面角±40°,自导作用距离1 000 m。先采用修正方位导引法,鱼雷航程到达修正导引距离后转现在方位导引法。采用蒙特卡洛仿真,仿真次数1 000,当目标进入鱼雷扇面视为捕获目标。
表3 为不同射距下鱼雷捕获目标概率统计表。从表3 数据可以看出:在一定误差条件下,随着射距的增大,鱼雷捕获目标概率减小。显然,目标距离越远在相同的误差条件下横向距离越大,必然会导致捕获概率的降低。

表3 不同射距下鱼雷捕获目标概率统计表
2.3 小结
通过以上仿真可以得到以下几点:
1)在其他条件一定时,鱼雷捕获目标概率随着目标舷角的增大而减小,且减小趋势随着目标舷角的增大而增大。因此,在使用线导鱼雷攻击远距离目标时,在条件允许的情况下,应尽可能选择相对较小的有利于鱼雷捕获目标的目标舷角。
2)在一定目标舷角情况下,随目标速度的不同,鱼雷捕获目标概率变化规律有所不同。当鱼雷和目标为迎击态势时,目标速度越大越有利于捕获目标,当鱼雷和目标为追击态势时,目标速度越大,越不利于捕获目标。
3)在一定误差条件下,随着射距的增大,鱼雷捕获目标概率减小。例如,当目标均方误差为3°、100 cab 射距时,捕获概率降低到50%左右,难以保证鱼雷有效捕获目标。
3 结论
本文主要对目标运动态势和目标距离两个因素,对线导加声自导鱼雷使用效果的影响进行了研究,通过仿真分析,给出了不同目标舷角、不同目标速度及不同射距条件下鱼雷捕获目标概率,并给出了使用建议,可为线导鱼雷攻击远距离目标的使用提供一定的参考。
猜你喜欢
少儿科技(2021年4期)2021-01-11
兵器知识(2020年2期)2020-03-20
文萃报·周二版(2019年46期)2019-09-10
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
军事文摘(2016年8期)2016-08-11
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
小学生时代·大嘴英语(2015年7期)2015-11-23
海峡科学(2013年3期)2013-10-21
数学大世界·小学低年级辅导版(2010年4期)2010-03-25