地面无人作战平台远程操控系统工效评价
2022-07-25 06:44:44迪怡嘉翟晓燕卢志刚王虎跃
火力与指挥控制 2022年6期
迪怡嘉,翟晓燕*,卢志刚,王虎跃,秦 嘉
(1.北方自动控制技术研究所,太原 030006;2.智能信息控制技术山西省重点实验室,太原 030006)
0 引言
随着作战需求的不断扩大,地面无人作战平台的功能不断增加。前期无人作战平台的人机交互技术主要集中在单无人作战平台的遥控技术方面,随着研究的深入,无人作战平台所要执行的任务越来越复杂,执行任务的环境也越来越复杂。针对如何在这样复杂的环境中让无人作战平台执行更加复杂的任务,无人作战平台人机交互技术的概念被极大地拓宽,已上升成为远程操控技术的概念,不但具有人机交互、操作的含义,还具有远程控制、半自主控制的含义。对于现阶段以遥控模式和半自主模式为主的地面无人作战平台,在侦察打击等任务中,操作员需要频繁使用远程终端及软件产品来完成平台越野机动、目标区域侦察、威胁目标打击等任务操作,对非结构化环境中越野条件下的地面无人作战平台的远程操控问题,困难就更加突出。
ISO9241 系列标准是最为常用的对于人机界面的评价指标。该标准主要针对的是办公环境下视觉显示终端的人机工程学,包含了信息显示、对话原则等界面设计要求和指导原则,但并不能完全适用于地面无人作战平台中远程操控系统的工效评价。例如,ISO9241-11 从整体评价的角度提出了效率、有效性、满意度等要素,但缺乏对交互系统定量的客观评价,测试人员很难通过该要素指标判断问题原因,进而不利于推动交互系统的改进与迭代。有关学者提出了多种评价模型或方法,Shackle 提出了包含有效性、易学性、效果等一级指标的评价模型;Schneiderman 提出了网站评价指标:响应速度、用户学习时间、用户使用后长时间保持的能力、出错率和主观满意度;李航从系统、交互、信息、情感等4 个一级指标入手建立人机交互界面评价软件。上述评价模型在软件人机界面工效评价领域应用较广,但是每个研究者提出的评价指标体系各有不同,且在对指标的选取原则、具体过程以及构建的一般方法方面研究较少,定性研究较多,定量研究很少,并没有从系统层面对人机工效进行要素分解与分析评价。
因此,在设计地面无人作战平台远程操控系统时,必须要从系统的角度综合考量其人机工效,对设计方案给出明确的评价体系和标准,对地面无人作战平台远程操控系统普遍存在的工效问题分析,提出改进建议,为其研制提供设计指导。
1 地面无人作战平台远程操控系统
1.1 地面无人作战平台组成
地面无人作战平台根据其各模块功能不同可将其划分为:底盘机动系统、任务载荷系统和远程操控系统。
底盘机动系统:底盘机动系统主要承担平台遥控或自主机动下的定位、感知、路径规划等任务,将无人平台输送到指定位置。
任务载荷系统:任务载荷系统则承担侦察、打击、值守等作战任务,完成对敌目标的发现、击毁与上报。
远程操控系统:操作人员采用手动遥杆、鼠标、触摸屏等操控方式通过人机交互界面进行人在回路的远程操控或监控。

图1 地面无人平台分系统示意图
1.2 任务控制流程
侦打一体地面无人平台是一种典型的地面无人平台,主要具备完成如下任务的能力:
1)机动任务:地面无人战车无人机动是以遥控、自主、人在回路的半自主方式进行机动,从当前位置机动至任务区域完成侦察、打击或其他任务。
2)侦察任务:主要是完成区域探测、固定路线巡逻监控等任务。包括无人机动与光电识别模块任务的组合任务,通过远程操控系统返回侦察信息,结合无人机、小型机器人及其他无人战车的信息完成侦察任务。
3)打击任务:是在完成侦察和探测任务的前提下,摧毁敌方目标。
在接收到任务后,操作人员将按照图2 的任务完成流程对地面无人平台进行操控,完成任务。

图2 任务完成流程图
侦打一体无人平台具备较为全面的任务功能,在地面无人作战平台中有一定的代表性,并且具备与常规地面装甲装备的可比性。因此,本文选取侦打一体无人平台的载荷及操控终端作为对象,研究地面无人作战平台远程操控系统的评价体系及指标。
目前主流侦打一体无人平台的任务载荷继承自传统装甲车辆的炮塔,主要包括武器模块、光电侦察模块、目标跟踪模块和远程通信模块等。具有远程操控、发现、跟踪并摧毁特定目标的能力。
依据任务,侦打一体无人平台在设计时参考了装甲车辆的三乘员配置即:连长/排长/车长、炮长、驾驶员,并将其操作界面分屏集中在同一终端,通过触屏功能操作,并以摇杆手动遥控完成连长/排长/车长和炮长的职能。其中,左侧为车长镜及搜索界面,右侧为炮长镜及打击界面,中间为驾驶员界面,下屏为指挥及协同态势界面,如图3 所示。

图3 操作终端示意图
2 评价指标
针对以上问题,本文对侦打一体无人平台远程操控系统人机工效评价指标体系的构建进行探讨,根据其系统特点和评价原则形成相应的指标体系;根据评价指标的特点选用对应的评价方法,对其远程操控系统人机工效进行评价,并提供改进建议。
2.1 指标分析
在对侦打一体无人平台远程操控系统人机工效进行评价时,需要针对具体设计给出评价结论。在构建评价指标体系之前,需要对远程操控系统进行指标分解。依据其设计过程和使用需求,将其指标体系分解为界面层、操作层和需求层。其中界面层主要是指界面要素的完备性、要素排布和层次结构的逻辑性、信息表达清晰度等,可分为界面要素、界面布局、界面信息3 个一级指标;操作层主要是指用户在操作交互系统时系统发生的属性,可以依据控制器和任务操作流程细分为:操作反馈、防误与容错、一致性、舒适性等4 个一级指标;需求层是指系统设计是否具备满足用户在使用该系统满足特定任务的功能,本系统主要以响应时间作为一级指标评价对用户需求的满足程度。
界面要素针对任务载荷界面,考核视频图像、载荷状态、控制按钮、参数调节4 个二级指标,是否具备完成侦察打击任务的能力;界面布局针对界面显示要素的排布是否具有逻辑性进行考核;界面信息则从各显示要素能否给出清晰精确的状态信息以供用户判断与操作进行考核。
操作反馈是指在用户对远程操控系统进行任何操作动作后,能够得到相应的反馈以表示动作完成与否和系统状态是否正常;防误与容错中防误是指远程操控系统在收到不符合正常操作流程或可能损坏装备系统的操作指令后,能够及时停止动作并给出提示的能力,容错是指系统控制在一定范围内的一种允许或包容用户操作失误,能够继续使系统正确工作的能力;一致性是评价该远程操控系统中相同或类似的功能和要素对于相同操作的反馈是否一致,便于用户快速理解并处理信息;舒适性则是从用户完成任务所需动作是否符合人因工程,能否高效准确地完成任务角度进行评价。
响应时间则需要从3 个角度进行考核:控制响应时间、反馈响应时间和动作完成响应时间。控制时间是交互系统在用户操作后到下发指令的时间,通常在0.1 s 内认为是可承受的极限;反馈时间是指交互系统收到指令后开始动作并给出反馈的时间,可承受极限约1 s;动作完成时间是指在系统开始完成单一动作到动作结束并给出反馈所需要的时间,在传统装甲装备作战应用中发现目标、锁定并完成射击动作的时间不应超过5 s。最终形成8 个一级指标,14 个二级指标,如下页表1 所示。
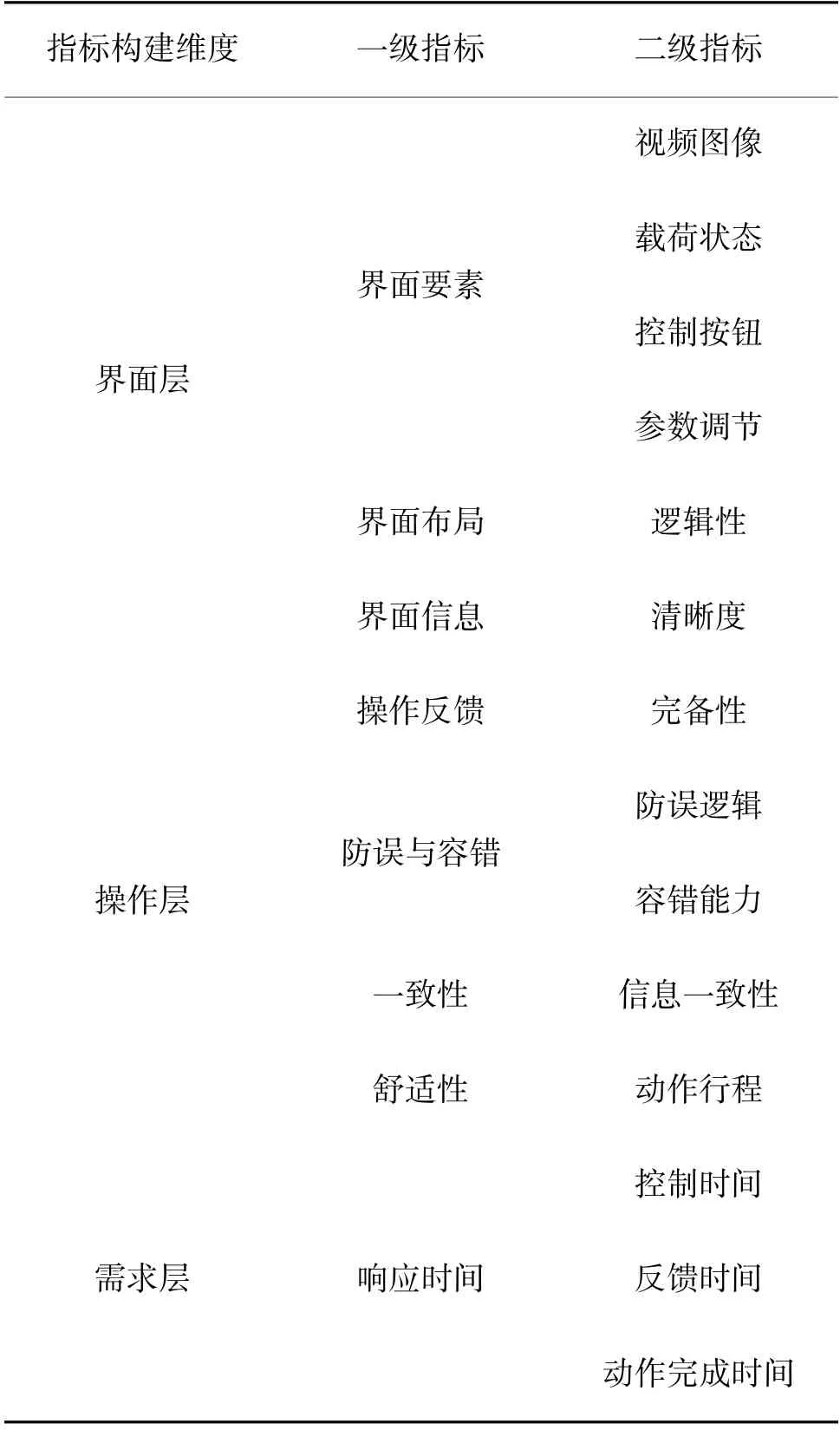
表1 评价指标体系
邀请10 名专家对14 个单项指标进行必要度打分(5 分制,5 分为非常必要),结合评判方法中的集中度和离散度得到必要度系数,其中集中度越大说明重要程度越大,设其界值为2,说明至少达到一般等级;离散度越小说明专家意见越集中,一般离散度小于0.63 则说明符合要求,则必要度系数≤0.63/2=0.315,14 个指标必要度系数均小于0.315,则指标体系符合必要性要求。
2.2 评价方法
侦打一体无人平台远程操控系统的使用效能影响因素较多,测试结果较容易受到随机因素与模糊因素的影响,采用一般的评估方法往往无法准确对其进行评价,而模糊综合评价法可以综合考虑环境中多种模糊因素的影响,处理其他方法无法解决的模糊信息,对对象进行综合评判。且侦打一体无人平台远程操控系统各指标之间存在一定的层级关系,单采用一级模糊综合评价时难以得到合理的评价结果,因此,本文针对该问题选用多级模糊综合评价方法,先对各指标进行综合评价并最终形成针对操控系统人机工效的综合评价。
指标集是指能够较为全面地反映被评价对象的因素的集合,根据侦打一体无人平台远程操控系统人机工效评价指标体系(表1),建立如下指标集:
U={界面层I,操作层O,需求层D}
一级指标:
I={界面要素I,界面布局I,界面信息I}
O={操作反馈O,防误与容错O,一致性O,舒适性O}
D={响应时间D}
二级指标:
I={视频图像I,载荷状态I,控制按钮I,参数调节I}
I={逻辑性I}
I={清晰度I}
O={完备性O}
O={防误逻辑O,容错能力O}
O={信息一致性O}
O={动作行程O}
D={控制时间D,反馈时间D,动作完成时间D}
针对上述指标集,采用模糊层次分析法对人机工效进行评价,其基本思想是依据多个被评价指标的性质和总目标,将人的主观判断过程数学化、思维化,并在传统层次分析法的基础上提高了决策可靠性。通过指标的两两比较建立模糊判断矩阵A,再通过计算得到评价因素的权重向量W={w,w,…,w},确定评估模型并对指标进行打分,得到评估向量V,最终得到人机工效评估得分Q=VW。
2.3 指标权重
本文在模糊层次分析法的基础上,设计了多级模糊综合评估法,其主要工作是构造两级模糊判断矩阵,并获取指标权重。对于某一级指标V下的二级指标V有权重向量:

最终工效评价结果:Q=QW,其取值范围为0~100,Q 值越大其系统人机工效的效能越高,其中,Q={q,q,…,q}。
2.3.1 构造模糊判断矩阵
以系统的一级指标为例介绍模糊综合评判模型,并邀请7 名专家对待评价要素的重要性进行对比打分,具体打分规则如下:
对于某一要素v其重要性程度从1~10 重要性递增(10 为最重要)得出评分集合:

建立模糊映射:

并给出模糊判断矩阵A=(a),表示本层次中各个相互关联的元素之间相对重要性的比较,a则表示v与v的相对重要性:
满足规则如下页表2 所示。

表2 模糊判断矩阵数量标度

2.3.2 模糊判断矩阵权重公式
对模糊判断矩阵A=(a)按行求和:

再利用转换公式得到转换矩阵:

2.3.3 二级模糊评价矩阵与权重
参照一级指标的权重确定方法,分别对14 个二级指标在各自所属一级指标下的权重进行确定,并得出模糊评价矩阵:

2.3.4 权重计算
根据7 名专家对一级指标的重要性评估打分,得出模糊判断矩阵,经计算后得出各专家评估指标的权重向量:
W=(0.083 9,0.155 4,0.133 9,0.098 2,0.130 4,

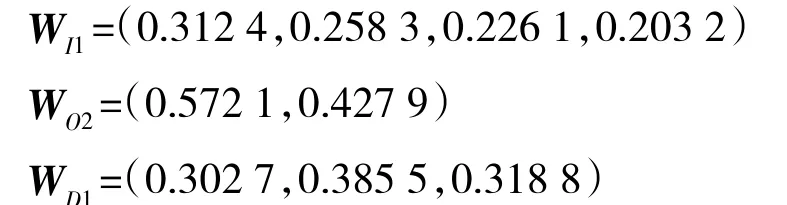
为排除各专家主观因素影响,对各专家打分所得权重向量进行均值计算,得到最终的一级指标权重向量为:

对于二级指标,由相同的方法得到:
2.4 综合评价
针对某型侦打一体无人任务载荷的远程操控系统,采用上述模糊层次分析法所得权重对人机工效进行综合评价。受试者则选取具有侦察打击任务知识背景和装甲装备操作经验,熟悉装甲装备系统构造的操作者,并依据“5 名受试者可以发现80%以上的可用性问题”的原则,选取了6 名受试者,从任务操作角度对以上14 个指标进行问卷评价,评语集如表3 所示。

表3 评语集换算标准
综合6 名受试者的评价调查结果,得到各指标的二级模糊综合评价得分Q,如下页表4 所示。
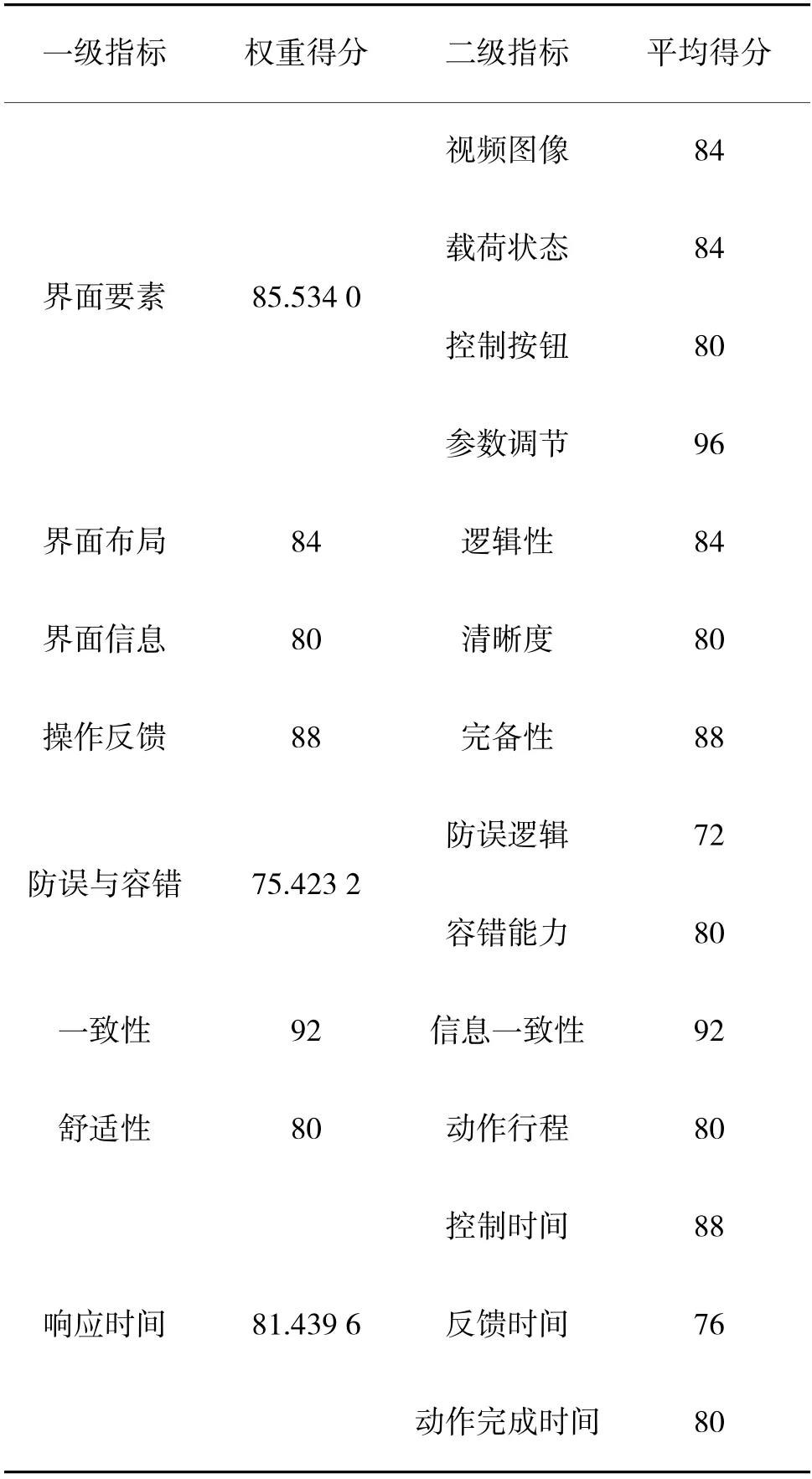
表4 系统评价得分
综合二级模糊评价权重向量,对该型侦打一体无人载荷远程操控系统人机工效进行评价,最终得分为83.367 1,按照最大隶属原则,得出该远程操控系统人机工效的综合评价为“良好”,但其中防误逻辑、容错能力和反馈时间3 个指标得分较低,对应的远程操控系统应改进硬件防误操作按键设计、软件危险任务操作保护逻辑、任务流程操作鲁棒性和图像信息反馈通信延迟,并对该系统的各模块进行改进。
根据评价建议,在原远程操控系统的基础上增加重要操作硬件防误触开关、危险动作确认对话框、任务流程打断自恢复和数据保存,改进信道带宽提高了动作响应速度。对改进后的系统重新进行评价检验,得分如表5 所示。

表5 改进后系统评价得分
改进后的系统视频质量有所提升,操作逻辑、防误容错得到明显改善,操作响应时间也有一定的减少,提高了操作体验,但由于增加硬件防误触开关导致动作行程增加,舒适性下降。由模糊综合评价法得出人机工效综合评价得分为85.034,总体相较上个版本产品的工效性有所提高。
3 结论
本文构建了适用于地面无人平台的远程操控系统人机工效指标评价体系,包含8 个一级指标和14 个二级指标。
采用多级模糊综合评价法,对现有某型地面平台远程操控系统人机工效进行评价实践,验证了指标与方法的有效性,发现该系统存在的问题并给出改进建议,改进后的系统评价有一定的提升。证明该方法有利于改进现有地面无人平台远程操控系统并指导新的系统设计。
该方法中对于二级指标采用问卷调查法和用户访谈法进行评价,在未来的改进方法中将结合态势感知评价,并对于一部分可以量化的指标将采用采集实验数据、定量分析的方式,对地面无人平台远程操控系统二级指标进行评价,以更加准确地评价该类系统,提升操作人员工作效率和地面无人平台安全性,提高系统效能。
猜你喜欢
包装工程(2023年20期)2023-10-28 03:21:10
包装工程(2023年20期)2023-10-28 03:19:18
青少年科技博览(中学版)(2022年6期)2022-08-31 09:04:00
人类工效学(2021年3期)2021-09-10 02:47:36
南都周刊(2021年3期)2021-04-22 16:43:49
建材发展导向(2020年16期)2020-09-25 07:54:20
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34