一种三轴碟式光纤振动传感器交叉耦合灵敏度试验研究
2022-07-21 09:14吴小笛杨帆刘帅方泽斌
声学与电子工程 2022年2期
吴小笛 杨帆 刘帅 方泽斌
(第七一五研究所,杭州,310023)
随着社会对工程安全问题的重视,振动传感系统越来越多地应用于工程监测,尤其在建筑、采矿、电力等领域。振动监测工程作业环境十分复杂,对振动传感器监测精度、监测范围、环境适应性和抗干扰能力的要求越来越高。光纤具有耐高温、低密度、抗电磁干扰性强、低损耗、环境适应性强等特点,对比传统的电阻式、电容式传感器,光纤传感器在液体、高温高压、易燃易爆、强电磁干扰等复杂作业环境中依旧能正常工作。因此,光纤振动传感器凭借其优势,成为新的研究热点。
光纤振动传感器在国内外已经有较多的研究成果,主要集中在提高传感器灵敏度和监测频率范围,较少涉及对多轴光纤传感器交叉耦合灵敏度的研究。北京理工大学Gao R 等人设计了一种紧凑型点式全光纤振动传感器,监测频率范围达到5 Hz~10 kHz[1]。电子科技大学戴维栋等人设计了Fabry-Perot声波敏感探头,监测频率范围达到0.2~8 kHz[2]。2007 年,国防科大胡曦文等人设计了一种三轴光纤矢量水听器,灵敏度达到30 rad/g[3]。长春大学刘会杰设计了干涉型薄膜片式光纤振动传感器,灵敏度可达6969.5 rad/g,频率范围10~240 Hz[4]。
交叉耦合灵敏度是指传感器传感轴正交方向上的加速度会叠加在传感轴信号中,影响传感器输出[6],它是三轴振动传感器振源定位的关键难点,直接影响定位精度[5-7]。现有的光纤振动传感器研究对于多轴光纤传感器交叉耦合灵敏度涉及较少,因此本文设计一种三轴碟式光纤振动传感器,搭建振动试验平台,并测试传感器对于不同方向的振动激励,计算各振动感应单元的交叉耦合灵敏度,为三轴光纤振动传感器交叉耦合灵敏度研究及振源定位提供试验参考。
1 振动传感系统及传感器设计
1.1 传感原理
本文设计的三轴碟式光纤振动传感器具备三个传感单元,其传感光纤固定于碟式敏感元件上,传感原理如图1 所示。由4 个弱反光栅分割出三段传感光纤,每段传感光纤及其敏感元件为一个传感单元。入射光首先经过弱反光栅产生反射光1,再通过传感光纤,最后经过下一个弱反光栅产生反射光2。由于碟式敏感元件振动带动相应位置传感光纤振动,导致反射光1 和反射光2 的光程差发生变化,其干涉光相位改变。通过解调干涉光相位变化,实现振动信号解算。此外,4 个弱反光栅实现传感单元还有准确定位三个传感单元传感光纤位置的作用。
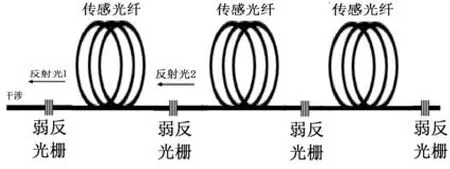
图1 传感系统原理
1.2 振动传感器设计
光纤振动传感器具有三个碟式振动感应单元,分别监测相互垂直的三个方向振动,即有三个振动感应单元,其结构原理图如图2 所示。图中,1 为传感器外壳;3(碟式膜片)、4(光纤卷)、5(质量块)为第一振动感应单元;6、7、8 为第二振动感应单元;9、10、11 为第三振动感应单元。光纤卷以质量块为中心,环形分布在碟式膜片上。第一至第三振动感应单元分别感应其碟式膜片垂线方向的振动分量,其垂线方向两两相互垂直。
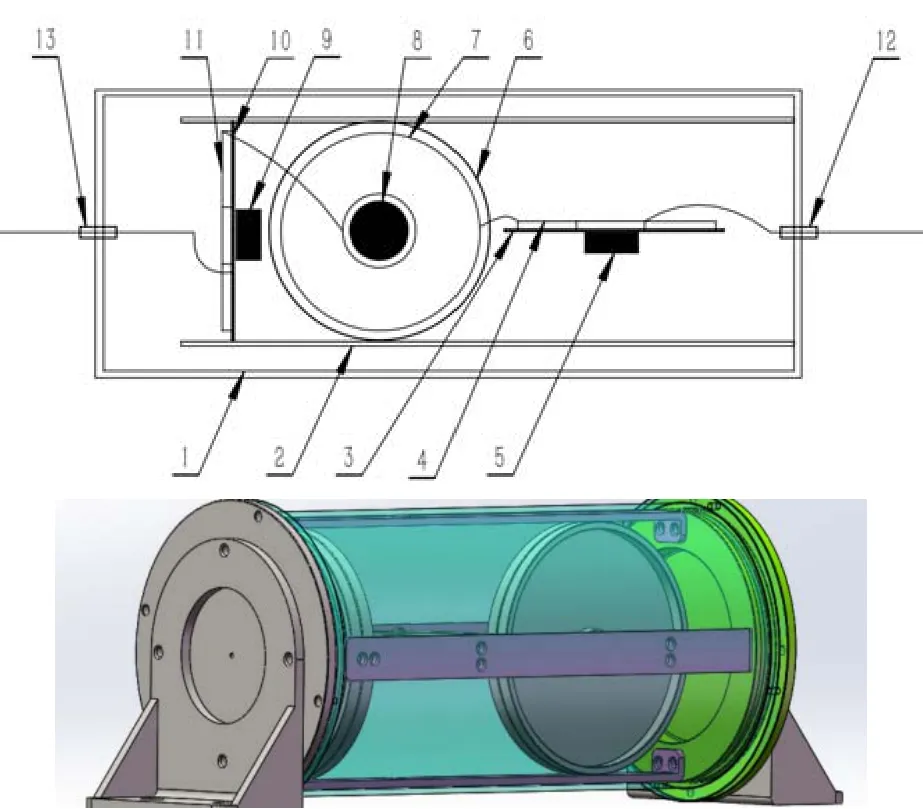
图2 三轴光纤振动传感器结构原理图
碟式膜片和质量块构成弹簧-质量系统,传感器受到振动激励时,质量块在碟式膜片垂线方向振动,带动碟式膜片和光纤卷产生一定形变,从而对光纤卷施加频率和幅值相同的周期性应力,解调仪计算光纤卷反射光相位变化量即可得到垂直方向振动激励信息。将第一至第三振动感应单元所检测的加速度矢量合成,可以得到振动激励的加速度。
2 传感器交叉耦合灵敏度试验
2.1 交叉耦合灵敏度测试系统搭建
本文基于相位调制设计光纤振动传感系统,由分布式振动解调仪和三轴光纤振动传感器组成,其结构原理如图3 所示。光源发射的激光通过耦合器后在光纤中传输经过弱反光栅会产生后向反射光,两个相邻弱反光栅反射光相互干涉,该干涉光经由耦合器被光电探测器检测。当外部振动作用于传感器内的传感光纤(传感光纤位于振动传感器内,与敏感元件固定)时,改变光程差导致干涉光相位发生变化,传感系统通过信号处理器解调光相位变化即可得到振动信息。
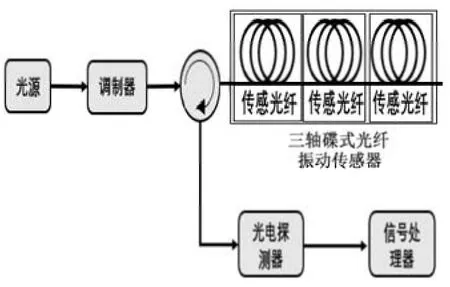
图3 系统结构原理图
按照原理图3 搭建实验平台,敏感单元紧密固定在振动台上,调节振动台输入电压与频率控制其输出加速度,利用解调仪采集并分析振动传感器传感光纤光强变化,实现振动监测,测试实物图如图4 所示。
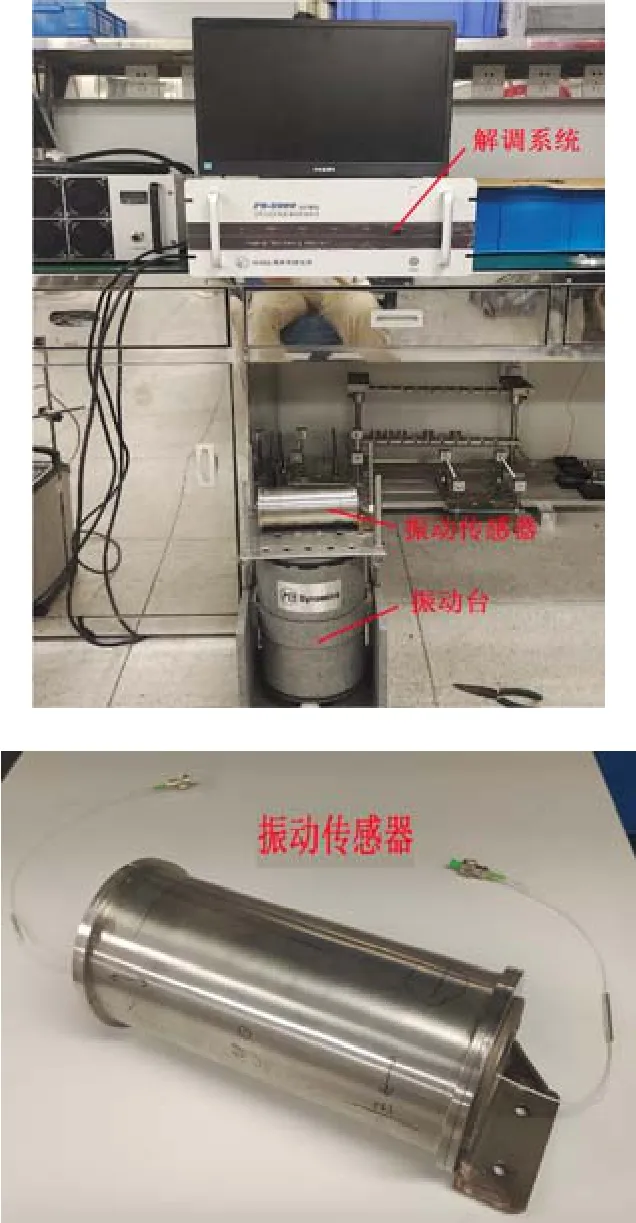
图4 实验设备图
2.2 实验结果
定义振动传感器第一至第三振动感应单元的振动感应方向分别为x、y、z,试验中分别在三个方向上施加相同的振动激励。由于本文的振动传感器设计目标为监测环境中的低频振动,因此测试中振动台振动激励频率设定为400 Hz。
2.2.1x方向振动
x方向振动测试结果如图5 所示,试验中向x方向施加频率为400 Hz 的振动激励,横坐标为分布式光纤声波/振动传感系统响应频率,纵坐标为相应振动频率的强度(此数据为光相位变化经分布式光纤声波/振动传感系统解调后的结果,与振动幅值正相关)。x方向振动测试结果:第一振动感应单元振动强度最大值为95 020,第二振动感应单元振动强度最大值为2810,第三振动感应单元振动强度最大值为4150。
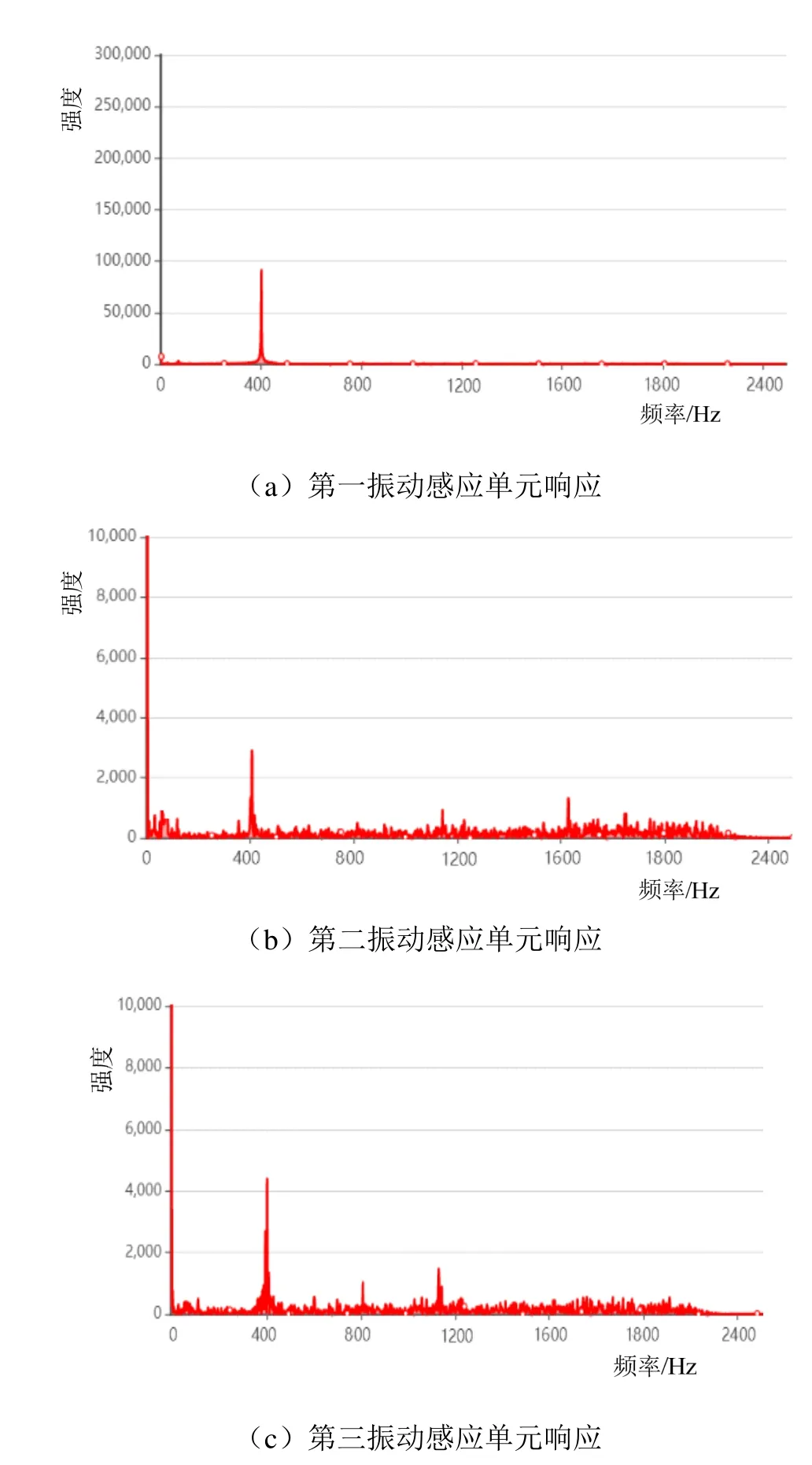
图5 x 方向振动响应
2.2.2y方向振动
y方向振动测试结果如图6 所示,向y方向施加频率为400 Hz 的振动激励。测试结果:第一振动感应单元振动强度最大值为4310,第二振动感应单元振动强度最大值为57 450,第三振动感应单元振动强度最大值为2030。
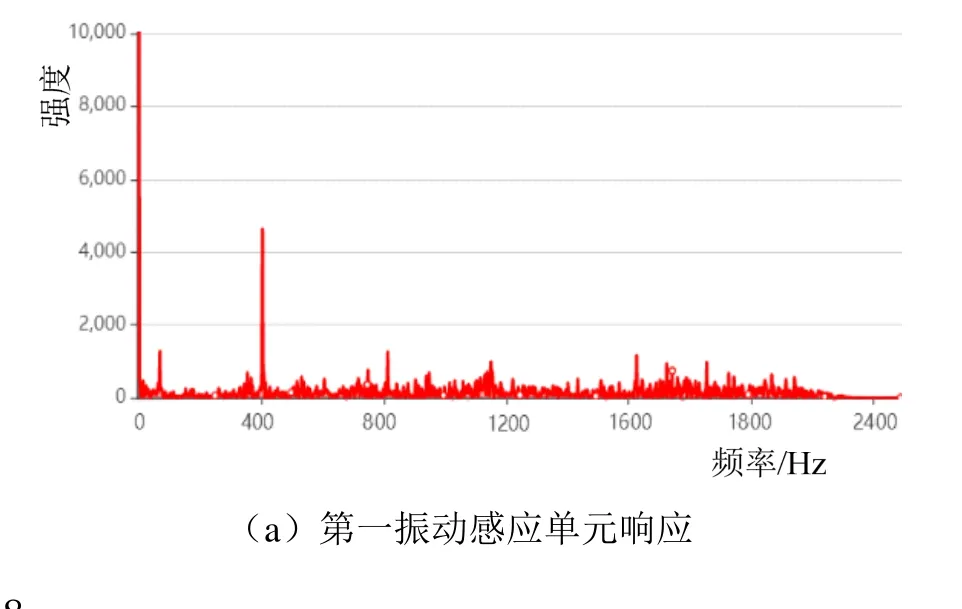
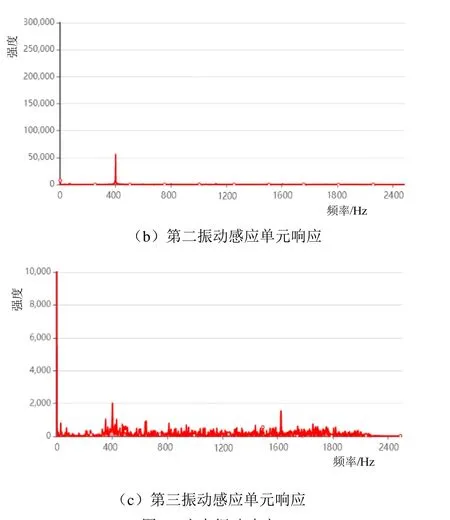
图6 y 方向振动响应
2.2.3z方向振动
z方向振动测试结果如图7 所示,向z方向施加频率为400 Hz 的振动激励。测试结果:第一振动感应单元振动强度最大值为4120,第二振动感应单元振动强度最大值为2630,第三振动感应单元振动强度最大值为230 130。
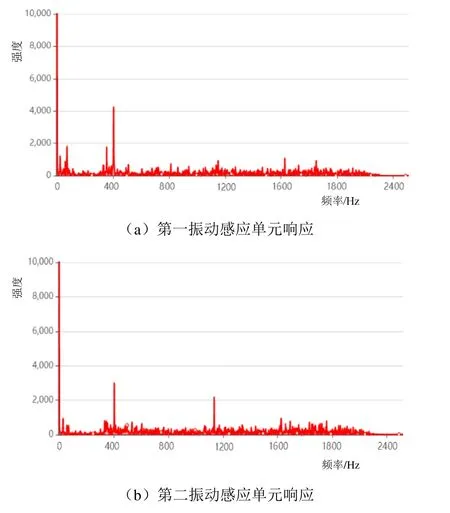
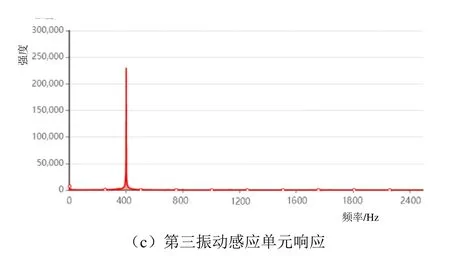
图7 z 方向振动响应
2.3 数据处理及结果分析
三个方向上的传感光纤数据如表1 所示。交叉耦合灵敏度计算为传感器传感轴正交方向上的加速度引起的传感器输出与传感轴上相同加速度引起的传感器输出之比。根据振动监测试验数据,计算交叉耦合灵敏度,数据如表2 所示。
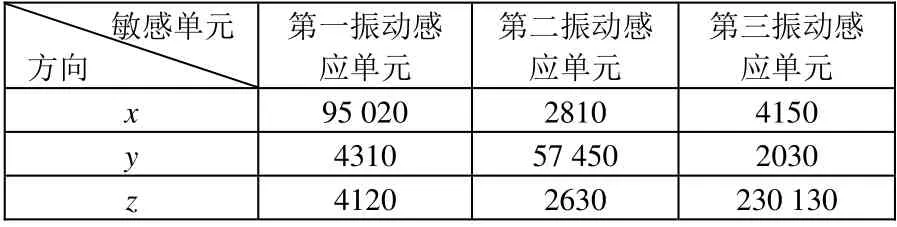
表1 振动监测试验数据
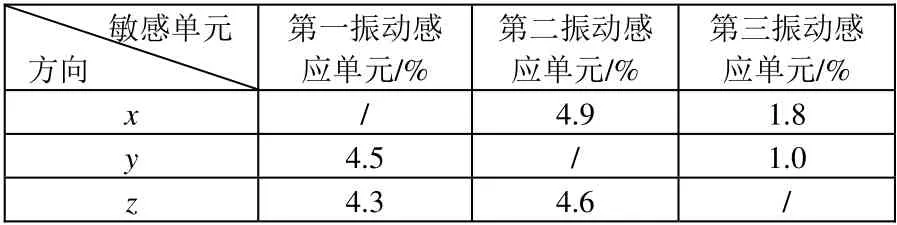
表2 交叉耦合灵敏度
从表2 可以看出三个振动感应单元的各方向的交叉耦合灵敏度均在5%以内,达到加速度传感器交叉耦合灵敏度要求,其中第三振动感应单元交叉耦合灵敏度在2%以内,第一、二振动感应单元交叉耦合灵敏度接近5%。第三振动感应单元交叉耦合灵敏度优于第一、二振动感应单元。
试验数据表明:三轴光纤振动传感器各振动感应单元的交叉耦合灵敏度在5%以内,在低串扰多轴加速度传感器许用范围内[8]。其中第三振动感应单元交叉耦合灵敏度在2%以内,超过商用加速度传感器交叉耦合灵敏度3%~5%范围。分析第三振动感应单元更优的原因:(1)第一、第二感应单元传感方向(x、y方向)与其质量块的重力方向不同,导致其z方向的振动增强而x、y方向振动减弱,第三振动感应单元传感方向(z方向)与其质量块的重力方向相同,导致其x、y、z方向振动均被增强;(2)由于三轴碟式光纤振动传感器加工、装配精度及试验安装精度等影响,可能造成第三感应单元的轴向垂直度较第一、第二感应单元高,导致其交叉耦合灵敏度较低。
3 结论
本文设计一种三轴光纤振动传感器,并搭建实验平台,测试传感器对于不同方向振动激励的振动响应,并计算其振动感应单元的交叉耦合灵敏度。结果表明:三轴光纤振动传感器各振动感应单元的交叉耦合灵敏度在5%以内,在低串扰多轴加速度传感器许用范围内,且第三振动感应单元交叉耦合灵敏度(2%以内)优于第一、第二振动感应单元(接近5%)。本文研究结果证明了具有碟式振动感应单元的三轴光纤振动传感器具备振源定位的基础条件,能够在工程上应用于液体、高温高压、易燃易爆、强电磁干扰等复杂作业环境中,提供振动监测、振源定位等功能。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
现代电力(2022年2期)2022-05-23
Journal of Geriatric Cardiology(2021年1期)2021-03-03
装备制造技术(2020年3期)2020-12-25
家庭影院技术(2020年1期)2020-06-24
家庭影院技术(2019年4期)2019-04-17
电子制作(2018年23期)2018-12-26
家庭影院技术(2018年9期)2018-11-02
电子制作(2017年13期)2017-12-15