基于单信标FDOA 法的UUV 长航程导航校准方法
2022-07-21 09:14宫榕杉
声学与电子工程 2022年2期
宫榕杉
(第七一五研究所,杭州,310023)
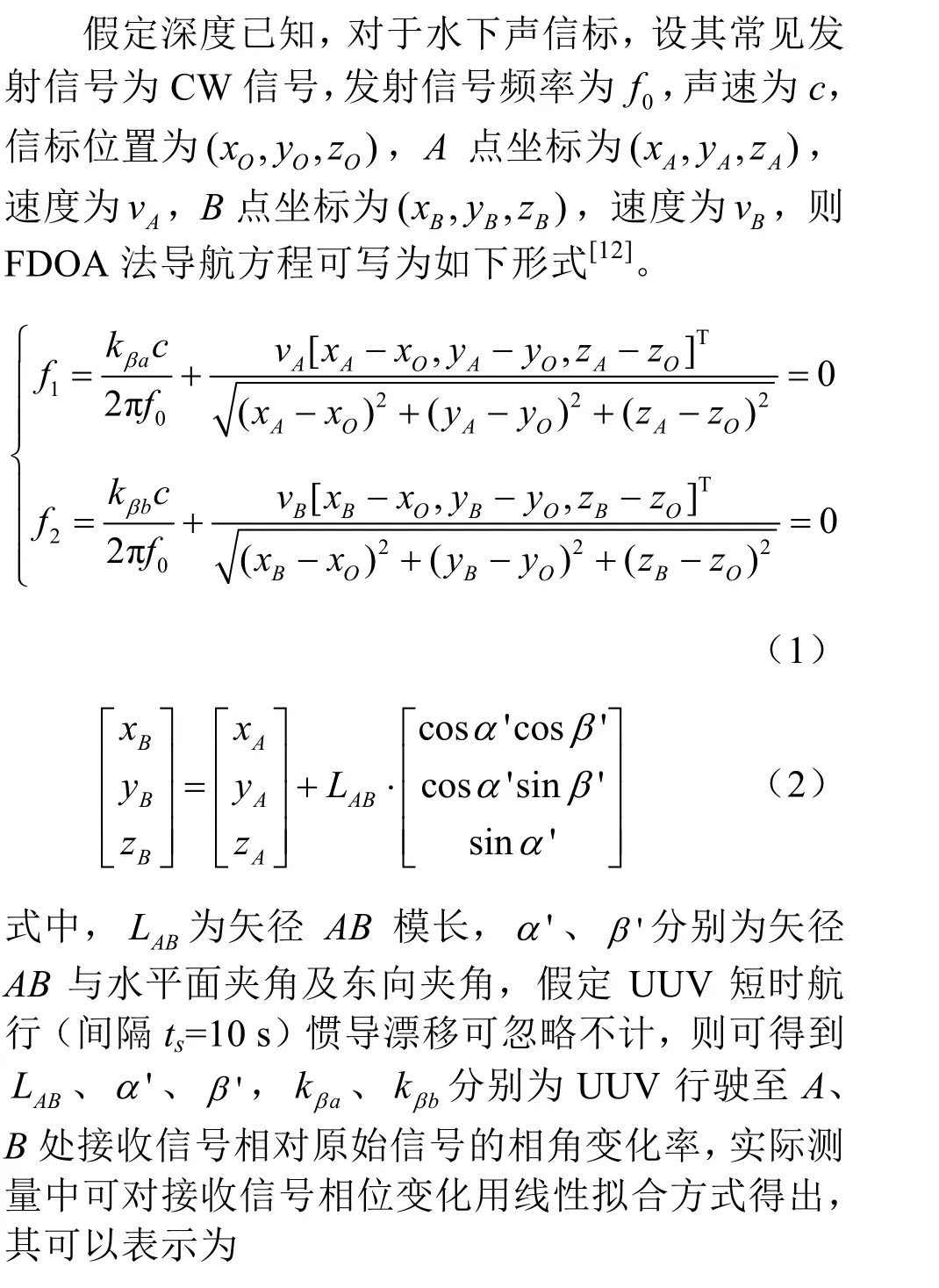
单信标导航(Single Beacon Navigation)是指单独利用一个信标,通过测量信标发射信号传播至UUV 处的传播时延、传播方位以及到达信号相角等信息,结合UUV 自身惯导测量值,进而解算出UUV 相对信标的空间位置。Bruno Ferreira 等人[1]研究了利用单信标AUV 同时进行定位及控制的问题,通过融合AUV 航向、纵向速度以及与信标间距离信息,利用粒子滤波和扩展卡尔曼滤波对AUV 位置进行了估计。Ivan Masmitja 等人[2]研究了将波浪滑翔机作为移动长基线对水下目标的定位问题,首先利用Fisher 信息矩阵得出绕目标航行最优半径与目标深度的关系,然后利用无约束最小二乘求解定位方程,对比分析了不同路径形状、不同航行半径以及信标位置偏移对定位精度的影响。
本文以UUV 利用单信标对其惯导累积误差进行校准的问题为应用背景,首先通过偏微分矩阵法对非同步单信标频差导航的定位误差进行分析,根据导航误差分布规律设计了导航校准接近航路,最后提出了非同步单信标导航的UUV 大范围导航校准流程,并进行了仿真验证。结果表明,非同步单信标导航误差校准方法可有效校准UUV 自身惯导累计误差,满足长航程航行精度需求。
1 基于多普勒信息的单信标导航方法
1.1 导航原理
基于多普勒信息的频差导航[3-11]方法的中心思想是通过测量不同接收位置之间到达信号频率差值,进而解算出目标自身位置信息。由于不涉及信号到达时刻信息,有效地避免了UUV 与信标间时钟不同步以及信号发射间隔未知的问题,导航模型如图1 所示。

图1 FDOA 法导航模型
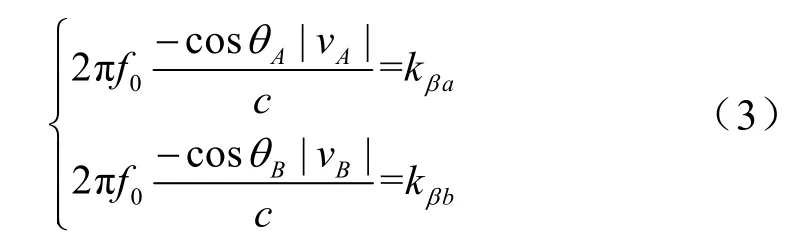
式中,θA表示A点到达信号方向向量与UUV 在A点处速度向量夹角,θB表示B点到达信号方向向量与UUV 在B点处速度向量夹角。
1.2 导航误差分析
信标与UUV 间时钟不同步且信号发射间隔未知,已知声速、信标位置、矢径AB以及CW 信号频率,可根据式(2)进行导航解算。但实际应用中由于受声速误差、船速误差等共同作用,UUV真实空间位置与理论计算结果存在一定偏差,本节重点研究不同类型误差对非同步单信标纯距离导航的影响。假定导航过程中UUV 等深度航行,且UUV 与信标深度均已知,研究水平面内导航误差随UUV 位置变化规律。利用偏微分矩阵法对导航误差进行分析[12],仿真参数为:UUV 航速v=5 m/s,信号发射时间间隔ts=10 s,信标位置(0,0,0),UUV航向方向向量v=(1,0,0),改变UUV 与信标间相对深度分别为0 m、200 m,在相同仿真条件下,FDOA 法导航误差结果如图2 所示。
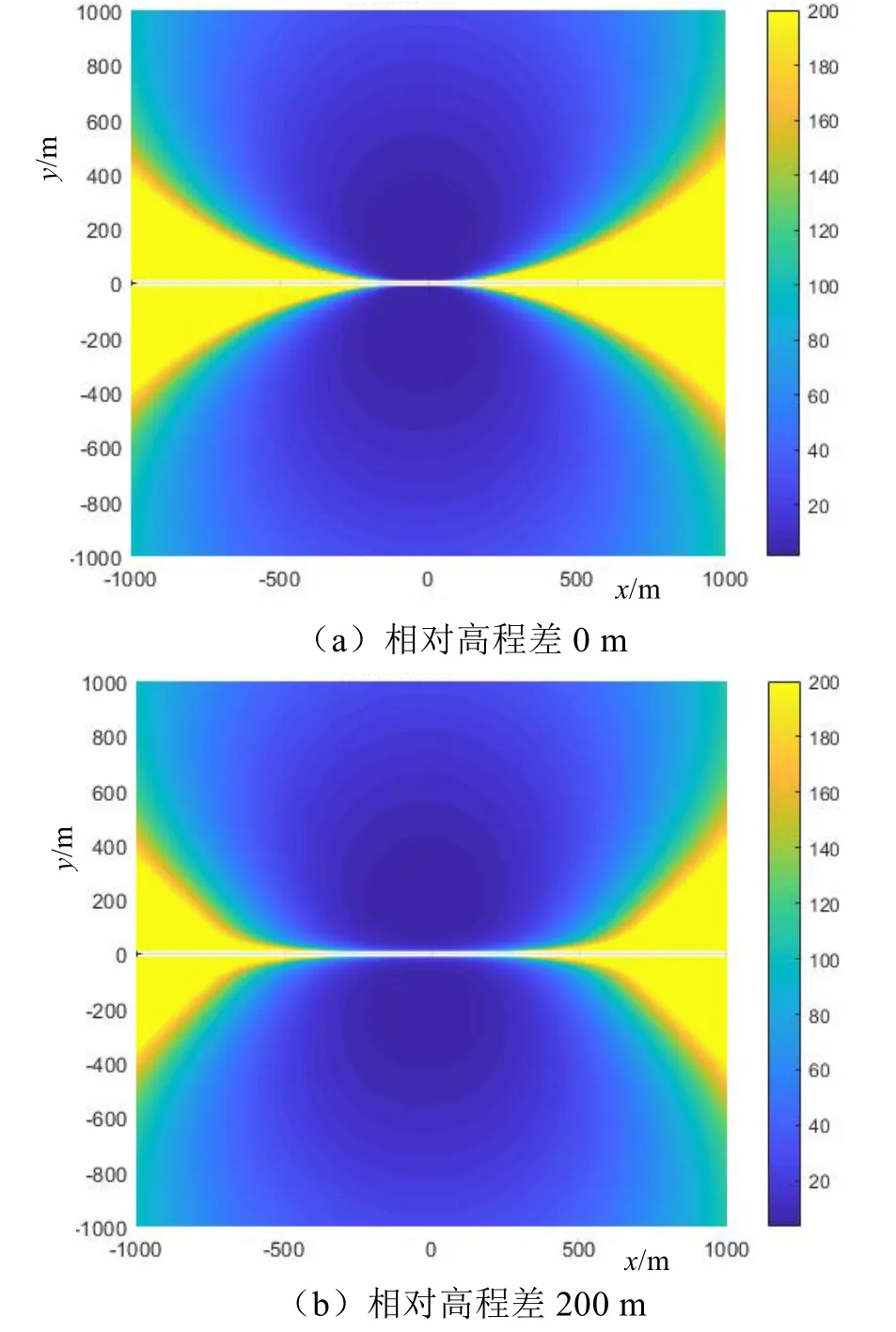
图2 FDOA 平面导航结果
在UUV 定深直航、相对深度200 m 条件下,与UUV 和信标同深情况比较,以信标在UUV 平面投影位置为中心,1000 m×1000 m 区域内,定位误差≤100 m 所涵盖区域面积优于UUV 和信标同深情况。相对深度差200 m 情况下单信标被动导航方法水平分量精度因子(Horizontal Dilution of Precision,HDOP)平面占比情况见表1。
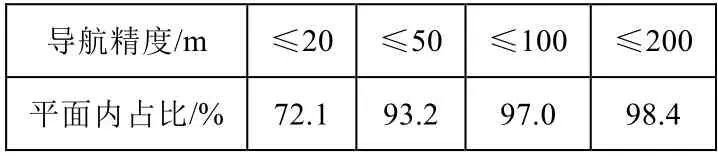
表1 本方法HDOP 分布情况
对于FDOA 法导航,通过对定位方程求偏导,可得出当信标坐标位置或其在水平面投影位于UUV艏向时,矩阵不满秩,导航方程无解。由仿真结果可知,当导航模型AO=BO时为效果最佳区域,在给定区域内,导航精度≤50 m 所涵盖范围在平面内占比在90%以上。综上可知,当信标位于UUV 正横方位时定位精度最为理想,由此得出,以信标为中心的环形航路为UUV 位置校准的最优航路。
2 长航程导航校准方法
2.1 环形航路接近路径设计
接近路径设计的主要目的是引导UUV 在自身惯导累计误差较大情况下逐步逼近预先设定的环形校准航路。单纯对于接近目标信标路径而言,最短路径为UUV 朝向信标在UUV 航行平面投影位置行驶。通过分析可知,信标或其在UUV 航行平面投影位于UUV 艏向所在直线上时导航系统不可观测,无法进行导航校准。因此,接近航路设计应综合考虑接近路程尽量短、路径所在区域尽可能使导航系统可观测这两方面因素。
设UUV 在t0时刻开始进入接近航路规划范围,本节假设UUV 定深航行,只讨论UUV 在固定深度进行机动,t0时刻UUV 状态为
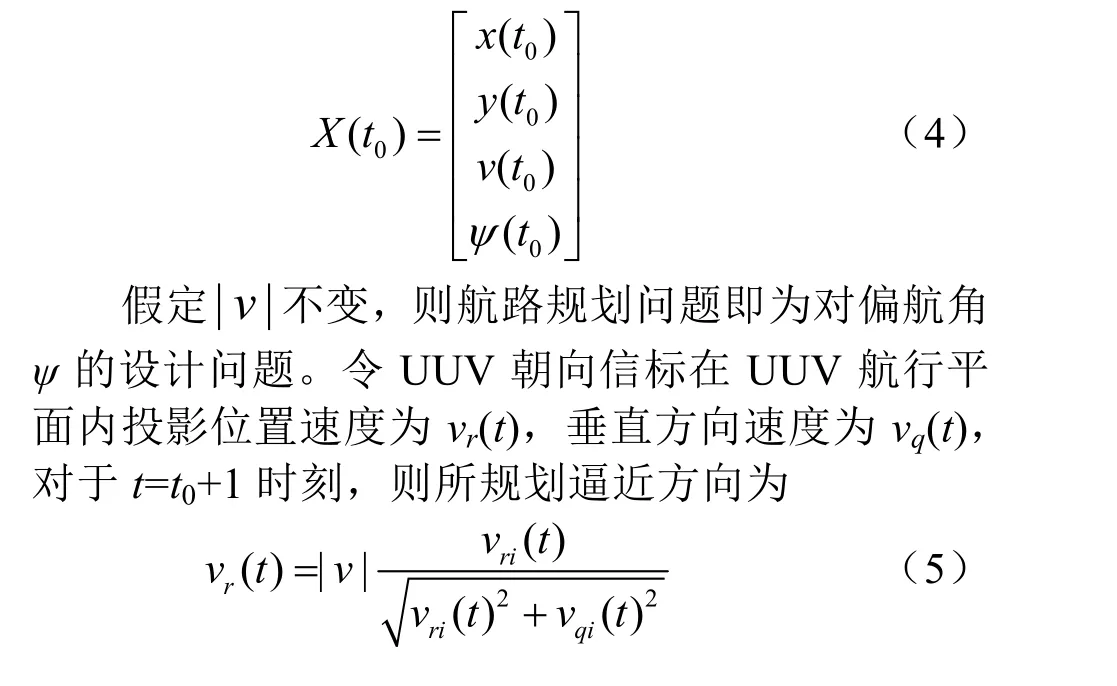
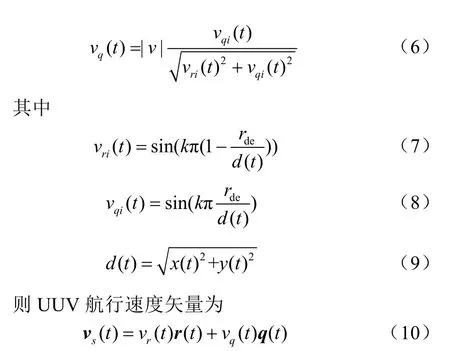
式中,rde为目标环形校准航路半径,k为调节系数,r(t) 、q(t) 为t时刻UUV 所在位置相对信标在UUV 航行平面内投影位置径向单位矢量与切向单位矢量。
设某t时刻UUV 位置如图3 所示,其中O点为信标在UUV 航行平面内投影位置。
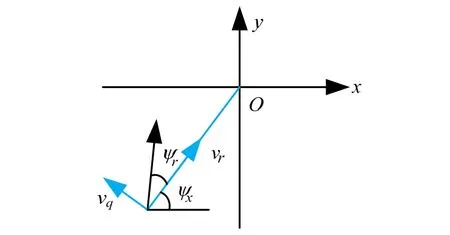
图3 某时刻UUV 规划速度方向
图中rv为UUV 运动时朝向信标方向速度分量,qv为切向速度分量,rψ为真实UUV 航向,xψ为rv方向与x轴夹角。则当前时刻UUV 偏航角ψ可表示为
2.2 长航程导航流程
信标布阵的实施步骤:(1)根据UUV 航行范围内水文数据或系统资料确定工作参数与误差参数。(2)根据参数设置系统可容忍最大累积误差、校准航路半径及接近航路起始位置,并合理布放信标。
完成信标布放后,基于单信标的导航校准方法:(1)UUV 离开母港前,完成惯导系统校准。并利用惯导系统引导其按规定航路行驶,直至收到单信标信号。(2)接收到单信标信号后,UUV 继续利用惯导系统进行引导,进入单信标导航区域后,结束惯导导航模式,转为单信标导航模式,如果UUV在到达预定导航范围而未接收到信标信号,则宣告导航失败。(3)UUV 以接近路线行驶,通过解算自身位置以更新自身坐标,逐渐逼近目标环形校准航路,最终驶入环形校准航路。(4)以经验值进行判断,当UUV 于环形校准航路行驶一周时,可完成对惯导误差的校准,当UUV 航行至艏向与期望艏向重合时结束单信标导航模式,转入惯性导航模式,直至接收到下一信标信号。
3 仿真实验
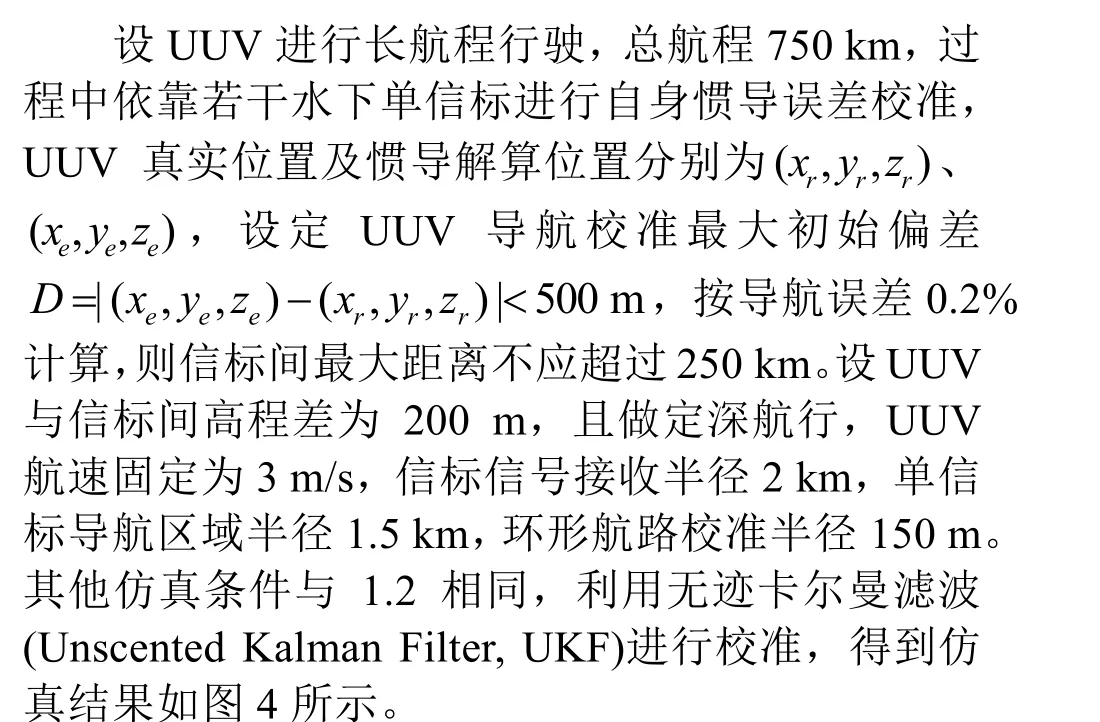
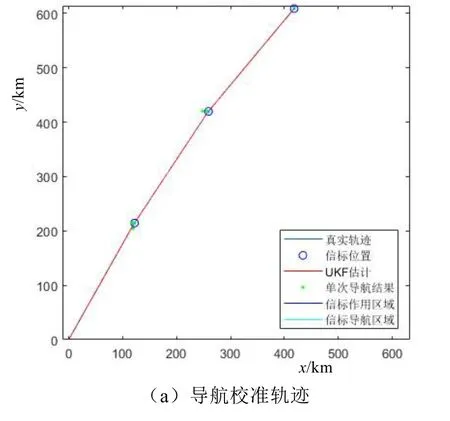
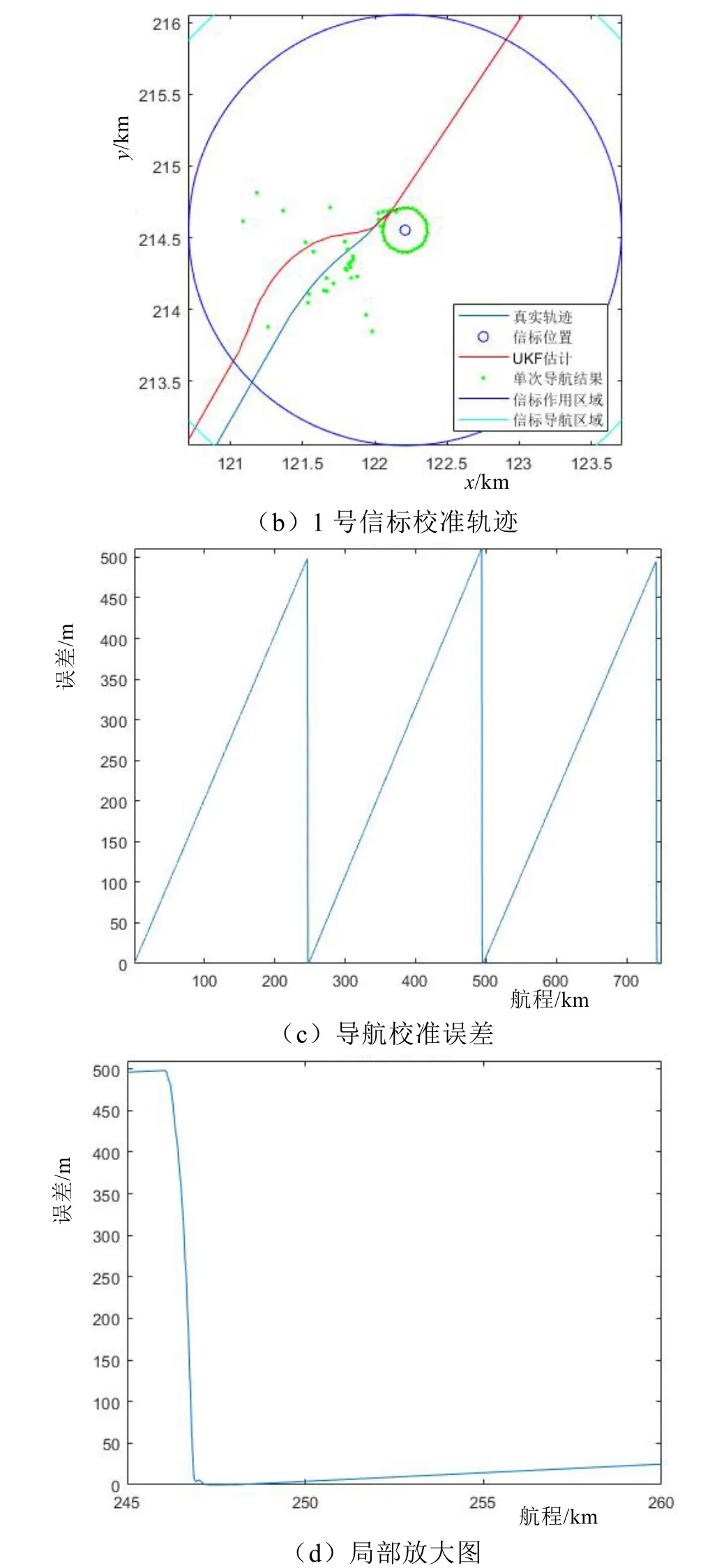
图4 UKF 校准结果
由仿真结果可看出,对于所提出导航校准方案,当UUV 顺利进入导航校准区域后,利用UKF 算法通过接近路径可将UUV 引导至目标环形校准圆周。由校准路径可看出,在UUV 驶入环形航路前,
UUV 相对信标主要做径向运动,其测量值分布较为分散,不利于估计位置收敛。随着UUV 逐渐接近信标,其航路逐渐转为相对信标的切向运动,测量值均匀分布在航路两侧,使得UUV 逐渐收敛至真实位置,且接近航路中不存在UUV 艏向突变的情况,符合实际行驶要求。驶入环形校准航路后,最终完成对惯导累积的误差。
4 结论
本文提出了一种基于水下单信标频差导航原理的UUV 长航程导航校准方法,建立了导航校准航路模型,设计了长航程导航校准流程。仿真结果表明,该方法根据UUV 惯导累计误差情况,利用UUV 与信标实时相对位置,渐进引导UUV 驶入环形最优导航校准航路,能够较好地对惯导累计误差进行校准,满足长航程行驶精度需求。该方法在保证UUV 自身隐蔽性的同时不要求时间同步,降低了工程实现复杂度。由于UUV 对海流流速敏感,未来可通过引入控制率,进一步提高实际校准精度。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中国惯性技术学报(2020年6期)2020-04-06
火力与指挥控制(2020年2期)2020-04-02
北京航空航天大学学报(2018年1期)2018-04-20
中国惯性技术学报(2017年1期)2017-06-09
发明与创新(2016年17期)2016-12-22
北京航空航天大学学报(2016年7期)2016-11-16
发明与创新·大科技(2016年5期)2016-05-17
海军航空大学学报(2015年3期)2015-11-11
海军航空大学学报(2015年1期)2015-11-11