基于支持向量机的航迹筛除算法
2022-07-21 09:20马永峥
声学与电子工程 2022年2期
马永峥
(第七一五研究所,杭州,310023)
在复杂多变的海洋环境中,主动声呐目标检测面临混响强、杂波多的问题,利用目标运动空间连续性的多假设跟踪(Multiple Hypothesis Tracking,MHT)方法[1]是解决这一问题的重要技术途径。然而,由于目标测量模型、运动模型、杂波模型与真实情景的失配,使MHT 的假设剪枝[2-3](如剪除速度过快和过慢的航迹、删除归一化残差偏大的航迹、保留前K个置信度最高的航迹(K-best 剪枝[4-7])等),易于出现误删正确航迹的现象。
为解决由模型失配引起的MHT 方法误删目标正确航迹的问题,本文提出了一种基于支持向量机(Support Vector Machines,SVM)的航迹筛选方法。该方法使用SVM对目标的航迹特征数据进行学习,通过数据驱动来选择分界策略,将目标的真实航迹和错误关联的虚假航迹区分出来,剔除不符合要求的航迹,实现对假设航迹数目的控制。
1 支持向量机原理
支持向量机是一种基于统计理论的机器学习算法[8],SVM 采取结构风险最小化原则,拥有较强的稳健性和泛化能力。SVM 本质上是一个凸优化求解问题,可得到全局最优解,避免出现局部极值。此外,SVM 学习所需的样本量小,对数目不多的样本进行学习后,就可以取得令人满意的结果。
SVM 学习的过程是寻找训练集最优超平面的过程,最终求得的超平面可将不同标签的特征向量区分开,且平面两侧的间隔最小,即



1.1 线性核函数

式中,x、y是特征向量;c是常数,c∈R。
1.2 多项式核函数
多项式核函数属于全局核函数,样本数据中每个向量都会对结果产生影响,多用于正交数据的学习,其表达式为

式中,d是多项式阶数;a是常数,a∈R。
多项式核函数中可调参数较多,不同的参数会对结果造成较大的影响,如果阶数设置的过高,会极大的增加计算量和学习时间,还会出现过拟合的情况,在训练过程中d不应设置的太高。
1.3 径向基核函数

1.4 双曲正切核函数
双曲正切核函数的表达式为

核函数的选取对于训练结果有着很大的影响,但目前并没有行之有效的方法来确定最优的核函数,只能依照样本数据进行具体的分析和尝试,从而确定可用的核函数。
2 航迹特征提取
利用SVM对目标的多假设航迹进行分类筛选,先要计算出航迹的特征向量,考虑到运算量、实时性以及历史航迹的影响等问题,计算某条航迹的特征时仅计算该航迹最新更新的N个点迹组成局部航迹的特征。本文使用的航迹特征主要有点迹距离方差、点迹连线夹角的方差、滤波航迹与拟合航迹的残差累积和、滤波航迹与拟合航迹航向差的方差等。
2.1 点迹距离方差


2.2 点迹之间连线夹角的方差
2.3 滤波航迹与拟合航迹的残差累积和

2.4 滤波航迹与拟合航迹航向差的方差
3 基于支持向量机的航迹筛除算法
基于支持向量机的航迹筛除算法过程如图1 所示。支持向量机训练所需的样本数据是试验中采集的真实数据,与目标实际轨迹对照后区分出真实航迹和虚假航迹并打上对应的标签,真实航迹的标签为1,虚假航迹的标签为-1。为了防止过拟合现象的发生,将样本数据分成训练集和测试集,进行交叉验证,同时为了保证普适性,尽可能地让训练集中的样本航迹来自不同的试验。
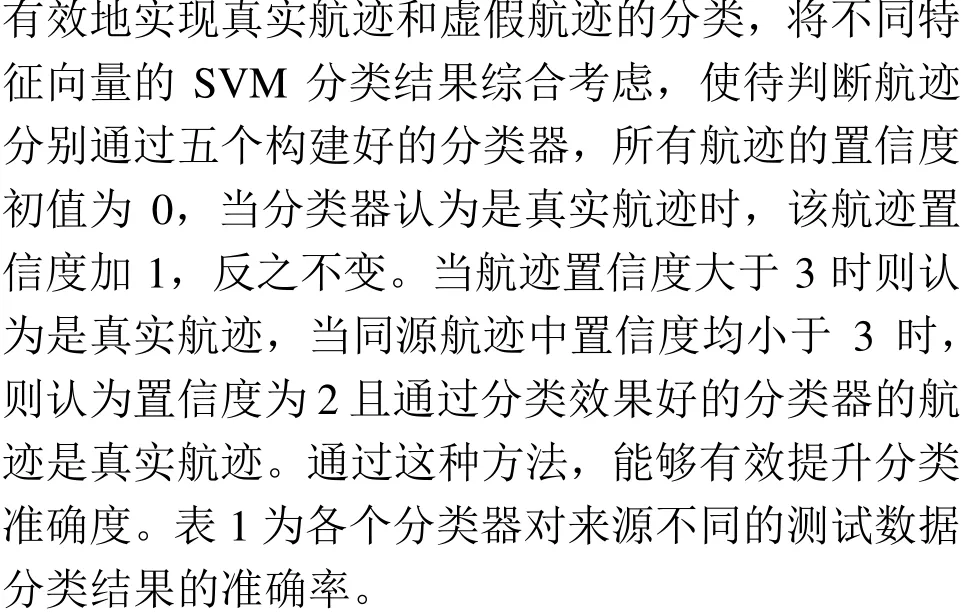

图1 基于支持向量机的航迹筛除算法流程图
从表1 中可以看出,综合分类器的性能虽然有时较最好的分类器差,但同时也避免了被单一分类器不佳的表现拖累。通过判断与分析,综合分类器在不同数据来源的测试集中都有优秀的表现,随着训练集规模的扩大,综合分类器的性能显著优于各个分类器,表现出很强的鲁棒性和环境适应性。
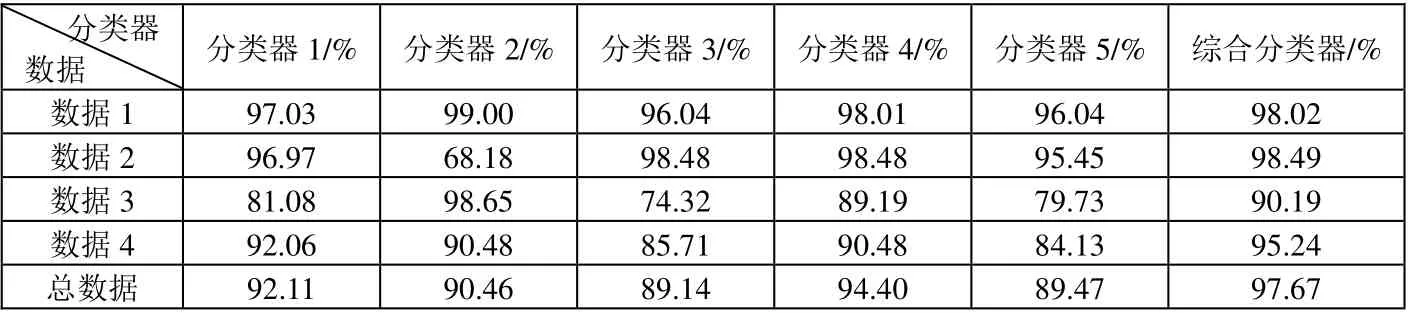
表1 各分类器判断准确率
4 数据分析验证
选取目标直线运动和目标拐弯两种场景的真实的海试数据,验证本文提出的基于支持向量机的冗余航迹筛除算法。
直线运动场景下的目标航迹,如图2 所示。图中目标起点为(3440,-3790),目标终点为(5320,-4550);实心圆表示的是航迹关联到目标正确的点位,空心圆表示的是航迹在当前帧没有关联到任何点迹后的预测结果,星号表示的是航迹关联到错误的点迹,实心小点是在跟踪过程中参与的杂波。在图2 的跟踪过程中共生成假设航迹287 条,通过筛除算法删除了173 条错误航迹,有效地控制了航迹数目。对比图2(a)和(b)可以看出,在该目标跟踪的中后段,虽然此时航迹关联到了错误点迹出现了跳点,由于此时只有一条假设航迹,分类器只能让该航迹通过检测。但通过对比可以发现,基于支持向量机的航迹筛除算法使航迹在跳点后迅速回归正确的位置,有效地约束了目标航迹,避免了多目标跟踪算法关联到更多的错误的杂波点迹,减少了航迹中的跳点,使得跟踪航迹尽可能的贴近真实轨迹,为后续的目标参数估计减少了干扰。
图2 目标直线运动航迹筛除算法效果对比图
目标拐弯运动场景下的航迹如图3 所示。图中目标起点为(23 200,-18 500),目标终点为(32 000,-9850);在图3 的跟踪过程中共生成假设航迹321条,通过筛除算法删除了114 条错误航迹,有效地控制了航迹数目。

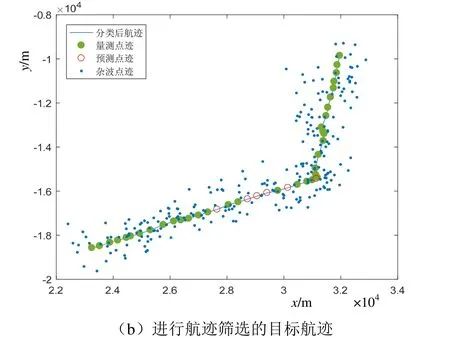
图3 目标拐弯运动航迹筛除算法效果对比图
对比图3(a)与(b)可以看出,当目标转弯时,模型失配、目标漏检、杂波干扰等因素的复合作用,使MHT 出现了目标跟踪丢失;当该目标的转向完成后,MHT 又重新跟上目标。基于支持向量机的航迹筛除算法,则能在此场景下依然保持对目标的稳定跟踪,避免了目标航迹信息的丢失。从实际数据的跟踪结果中可以看出,基于支持向量机的航迹筛除算法在杂波环境、目标拐弯以及目标漏检的环境下能够保持对目标的准确跟踪,有着较强的抗干扰能力和鲁棒性,能够有效地提升复杂环境下对目标的跟踪能力。
5 结论
本文提出一种基于支持向量机的冗余航迹筛除方法。通过支持向量机作为目标假设航迹的分类器,以数据驱动策略确定分界面替代了传统启发式或基于先验的门限分界,有效地提升了复杂环境下对目标的持续跟踪能力;实际数据处理验证了所提方法的有效性。
猜你喜欢
科学与信息化(2021年30期)2021-12-24
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
青年歌声(2019年12期)2019-12-17
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
北京航空航天大学学报(2017年7期)2017-11-24
初中生世界·九年级(2017年10期)2017-11-08
北京航空航天大学学报(2016年6期)2016-11-16