
一种基于单应性变换的车道线检测方法
2022-07-21 07:26邵士媛刘春霞
郑州铁路职业技术学院学报 2022年2期
吴 琳,邵士媛,李 袁,刘春霞
(郑州铁路职业技术学院,河南 郑州 451460)
随着智能交通技术的发展,行车安全和自动化越来越受到人们的关注。高级汽车辅助驾驶系统(Advanced Driver Assistance System,ADAS)和全自动无人驾驶车辆(Autonomous Vehicle, AV)已经成为汽车行业的发展趋势,不断有相关产品出现在市场上。这些系统依靠多种传感器的数据集成与分析构成路况感知系统,为车辆提供有关车道、交通路口、交通标志、交通信号、行人及其他车辆的准确信息,从而帮助车辆智能控制系统做出正确决策,有效减少事故发生率。车道检测和识别是路况感知系统的一个关键环节,其识别速度和准确性决定了车道保持、车道线偏离预警等车辆智能驾驶功能的实现效果[1]。依据国内外的研究现状,车道线检测主要有两类方法[2]:一是利用图像处理方法提取对应车道线的像素,再利用直线或曲线拟合获得车道线的几何信息,这类方法的代表是Aly提出的基于图像逆透视映射和随机抽样一致的贝塞尔样条拟合车道线识别方法;二是利用深度学习进行的,此类方法利用大量的图像数据构成训练样本集和测试样本集来训练深度神经网络模型。Gopalan 等人利用像素分级特征建立模型,并利用提升算法选取适用于车道线检测的特征。Li等人提出了一种能够提取车道几何结构信息的多任务深度卷积网络,并同时使用递归神经网络检测车道。这两类方法能够处理绝大多数复杂车道情况下的车道线检测,但是算法较为复杂,不利于在嵌入式平台上实现实时运算。本研究采用第一类方法,提出一种基于图像处理和几何分析的快速车道线检测算法。
1 基于单应性变换的车道线识别方法
利用先验感兴趣区域、颜色信息、梯度信息对车道线像素进行筛选,然后通过单应性变换和直方图分析在路面俯视图中提取属于车道线的像素,并利用二次曲线拟合提取车道线信息,其算法流程如图1所示。
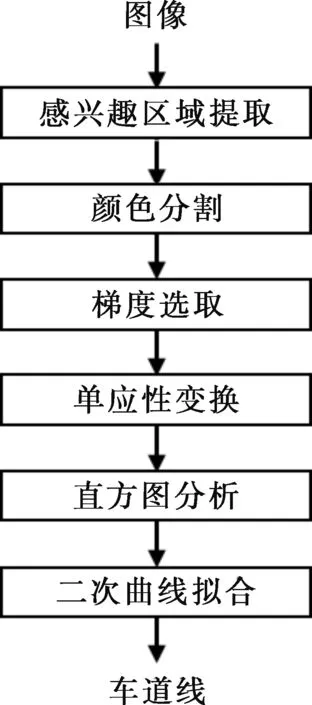
图1 车道线检测算法
1.1 感兴趣区域和图片预处理
根据道路图像特征,选定图像中下方的梯形区域作为感兴趣区域,即只分析该区域内可能存在的车道标志线,并且对图像进行平滑滤波,在去除噪声的同时也兼顾了计算速度。
1.2 车道线像素选取
在对图像进行预处理后利用颜色分割和梯度计算提取图像中可能的车道线像素,由于车道线标志通常为白色或黄色,因此利用颜色信息对图像进行筛选。由于像素颜色信息由红、绿、蓝三通道(R,G,B)组成,则白色像素符合公式

(1)
而黄色像素符合公式

(2)
由于车道线通常会带来像素灰度值沿水平方向的变化,因此利用Sobel算子[3]计算出图像各像素处沿水平方向的梯度幅值,并且选取较大幅值像素作为候选车道线像素。车道线候选像素的提取结果一般如图2所示。

图2 当前车道标志线候选像素
1.3 单应性变换和直方图分析
单应性变换是从一个投影平面到另一个投影平面的可逆性变换。假设道路是一平面,则可利用相机的外部参数(例如相机相对于路面的高度和角度)推导出相机投影平面到道路俯视平面的变换关系[3],从而将道路信息从照相机视角转化为俯视视角。
俯视图消除了照相机投影引起的透视形变,因此可以更加方便提取车道线信息。由于车道线在俯视图中呈竖直方向,将俯视图中的像素灰度值沿竖直方向累加,则对俯视图中每一水平位置可形成如图3所示的直方图,直方图中的两个峰值则对应于左右车道线。
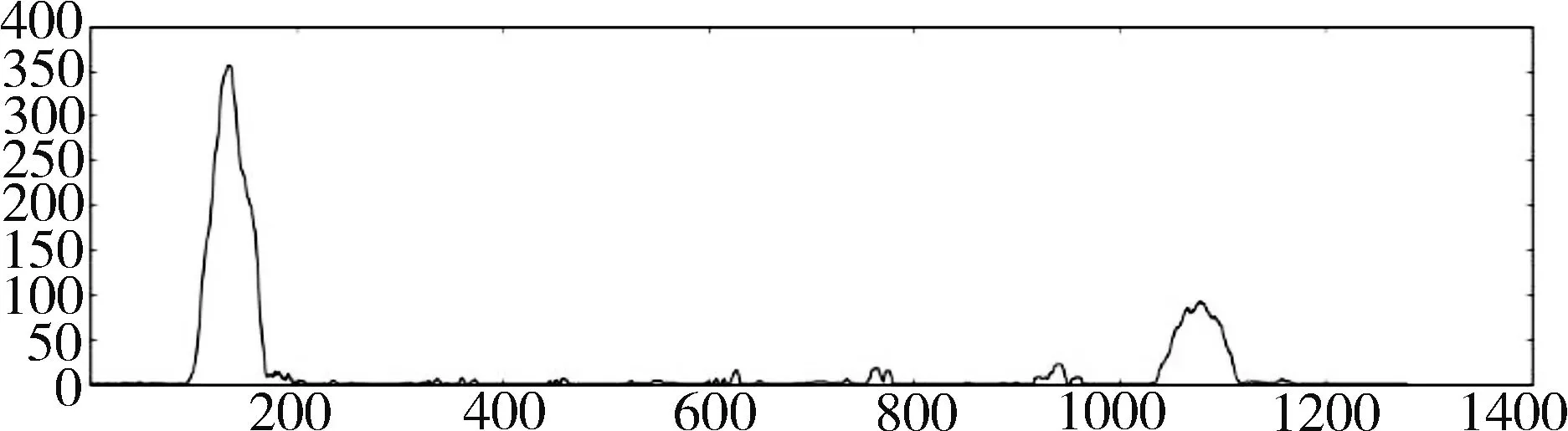
图3 灰度直方图
1.4 二次曲线分析
将俯视图沿竖直方向等分为9个窗口,并将窗口设置在直方图中对应于左右车道线的两个峰值处。在每一窗口中计算出候选像素分布的中心值,然后对窗口的中心位置进行二次曲线拟合。在得到车道线的二次曲线方程后可根据二次曲线计算得出车道线曲率。若假设相机图像中心对应于车辆中心,还可由此估计车辆中心与车道中心的偏移距离。
2 实验结果
为验证算法的实时性和有效性,使用Python编程进行试验。试验平台硬件环境为Inteli5-3450 CPU,主频为3.1 GHz,内存8 G RAM。试验结果表明,本算法的运算速度可以达到30帧/秒,满足实时运算要求。
利用该算法对行车图像进行检测,并估计车道的曲率半径和车辆中心相对于车道中心的偏移,如图4所示。当车道为直线时, 曲率半径应趋近于无穷大;当车道为曲线时,曲率半径较小。图4(a)显示了直线路段和非常大的曲率半径估计值;图4(b)则为曲线路段,所估计的曲率半径远小于直线路段。

(a)

(b)
3 结语
本研究提出了一种基于颜色信息、梯度计算、单应性变换、直方图分析和曲线拟合的车道线检测方法。该方法简单实时,对直线车道线可进行高准确度提取,复杂路况(如阳光照射下路面上的阴影)对颜色分割和梯度计算影响较大。今后将进一步提高算法在复杂路况下的准确度和鲁棒性,如结合传统图像处理技术和深度学习方法对算法进行改进。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
数学物理学报(2022年4期)2022-08-22
湘潭大学自然科学学报(2022年2期)2022-07-28
数学物理学报(2022年2期)2022-04-26
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
数学物理学报(2019年5期)2019-11-29
摄影之友(影像视觉)(2018年12期)2019-01-28
初中生世界·八年级(2017年3期)2017-03-24
