道路全息测绘智能化提取方法研究
2022-07-20 01:16韦通
经纬天地 2022年3期
韦 通
(山东省国土测绘院,山东 济南 250014)
0.引言
2017年11月,原国家测绘地理信息局批复上海市新型基础测绘试点项目,道路全息测绘应运而生[1]。相较于传统的数字测图技术,道路全息测绘通过全景相机、激光雷达等先进感知设备,结合组合导航定位技术,使外业采集数据更加便捷、数据成果内容更加丰富,为城市的数字化建设提供了重要保障[2]。但是,这种高效、快速的数据采集手段给后续内业制图带来了新的问题:(1)数据种类多,点云、全景影像等多种数据在成果制作中难以有效融合、利用;(2)数据量大,不仅增加了内业人员数据处理环节,也增加了内业人员的辨识难度;(3)内业采集要素、属性多,极大地增加了内业编辑人员的工作量、作业难度。
为此,基于点云数据的智能化提取成为当下道路全息测绘研究的热点之一,国内外众多学者对此进行了大量研究。马新江等人针对车载激光点云中道路边界提取不精确、复杂度高等问题,提出了一种基于路缘特征的城市道路边界自动提取方法,通过实验证明了该方法的可行性和有效性[3]。对于道路标识线等地物要素,范雯等人提出了一种基于空谱特征的车载LiDAR点云道路标识线提取方法,该方法充分考虑了车载激光点云中道路标识线的颜色、空间邻域和高程等信息,依次对点云数据进行自动分类,提取道路标识线[4]。针对城市道路中的杆状地物,李永强等人先通过改进形态学算法一处点云数据中的地面点,并通过统计分析移除噪声点,再根据预先建立的杆状地物样本训练SVM分类模型,对杆状地物进行自动化提取[5]。此外,国内众多机构也进行了深入研究、探索,研制了相应的道路全息测绘制图软件,如清华三维的EPS、上海测绘院基于Cloud compare软件的智能提取模块。
但上述研究仍然存在着一些问题,如,算法性研究实例数据验证较少,很难快速投入实际生产;各个机构开发的半自动软件模块,无法融合全景照片、传统地形数据,以及自动化提取的效果严重依赖于点云的质量。本文将利用TOPODOT对道路点云进行智能化提取,重点针对多源数据融合、地物要素自动化提取、属性编辑等方面进行研究,并通过具体的工程实例,验证本文方法的可行性、适用性。
1.全要素地形绘制
道路全息测绘,首先利用车载扫描系统进行外业数据采集,获取的数据包括点云、全景照片、移动端GNSS/IMU数据和基站GNSS数据;数据采集完成后,使用Inertial Explorer(简称IE)对基站GNSS数据、移动端GNSS/IMU数据进行定位测姿数据的融合解算,得到车载扫描系统的行车轨迹信息(POS轨迹数据),并利用POS轨迹数据解算相应的点云数据;通常初步解算的点云数据无法满足全息测绘的精度要求,需要进行点云纠正,以此修正POS轨迹数据;最后根据修正后的POS轨迹数据重新解算点云,并整理全景照片。
1.1 图形信息提取
全要素地形数据制作主要根据合格的点云、全景照片等数据,在内业软件平台中对地物要素进行提取,地物要素按照类型可分为点要素、线要素和面要素,地物要素的提取顺序可按“线要素—点要素—面要素”进行提取。线要素主要包括范围分界线、道路边线、道路标志线、通信线、分隔栏等线状地物;点要素主要包括行道树、杆状物、各类管道设施、垃圾箱、交通标志等点状地物;面要素主要包括填充面、网状线、停车位、候车棚等面状地物。
1.2 属性信息编辑
根据道路全息测绘“应采尽采”的准则,全要素地形成果不仅包含各类地物要素的图形信息,还涵盖各类地物要素的社会、经济属性。通常,杆状地物需要录入其高度、编号等信息;交通标志牌需要录入其内容、数值等信息;候车棚需要录入其车次、站名等信息。
2.工程实例
2.1 工程数据
本文以徕卡Pegasus Two Ultimate移动激光扫描系统获取的广州某区域一段335m的单车道路数据作为实验数据(如图1所示)。道路数据包括点云数据和全景照片数据,其中,点云数据共18117727个数据点,涵盖道路标志、道路标线、人行横道线、道路边线、公路护栏、路灯、指示牌、行道树和一般公路桥等多类型地物要素;全景照片数据共92张,与点云数据空间位置相对应。

图1 实验数据
2.2 智能化提取
该段道路中涉及的地物要素,按类型可分为点要素、线要素、面要素,其中,点要素包括路灯、指示牌、行道树等地物要素;线要素包括道路标线、道路边线、公路护栏、人行横道线等地物要素;面要素包括一般公路桥、路面标志等地物要素。
TOPODOT智能提取流程:
(1)对上述点云数据,通过调节点云的反射强度信息,使地物要素的边界轮廓更加分明;
(2)根据入库标准,在软件波处理,得到每一列位平台中定义地物要素图层、地物要素属性列表、地物要素图形符号和智能提取模板,生成地物图层的*.csv文件、地物要素图形符号和智能提取模板的*.cell文件,以及地物属性列表的*.xml文件,便于相同项目直接使用;
(3)利用TOPODOT的智能提取功能对地物要素进行矢量提取,提取结果(如图2所示):

图2 矢量图形提取结果
从图2可以发现:TOPODOT很好实现了实验数据的特征点云分离,为后续智能化提取的准确性提供了先决条件;利用TOPODOT中智能提取功能,结合自定义的智能提取模板,对斑马线、杆状物、路面标线、道路边线等地物实现了准确提取,且矢量数据与路面起伏情况完全贴合。
2.3 属性编辑
在TOPODOT平台中,可以在绘制矢量图形时,使用自定义的地物属性列表为各个地物附着属性信息;也可在全部矢量图形完成后,利用自定义的地物属性列表按要素编码类别统一附着属性信息,结果(如图3所示):
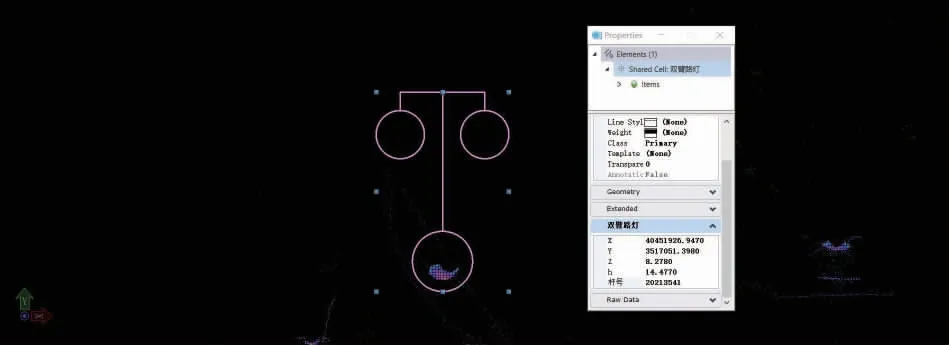
图3 地物要素属性成果
从图3可以看到:双臂路灯的属性信息不仅包括其空间位置信息,还包括灯杆高度信息、杆号信息;对于路灯的空间位置信息、灯杆高度信息等数值信息,可以根据点云数据自动识别,录入至属性表相应位置;对于路灯的杆号等字符信息,需要根据外业综合调绘结果,手动录入。
3.成果精度分析
为了对TOPODOT软件智能提取功能进行全面评估,利用网络RTK技术、全站仪技术在实验路段采集检查点,检查点均匀分布于路面标线、人行横道线、一般公路桥、交通标志、双臂路灯等地物要素,检查结果(如表1所示):
从表1可以看出:该实验道路中线要素、面要素、点要素的点位精度都优于0.05m,满足道路全息测绘的精度需求;线要素中路面标线、人行横道线的点位误差为0.03m,说明了TOPODOT在路面标线智能提取的准确性;一般公路桥的点位平面点位误差不大于0.02m,而点位高程误差在0.03至0.05m范围内,可能是因为高架桥的震动导致RTK测高不稳定;点要素中交通标志的点位误差较差,是因为空中标志的点云密度较低,TOPODOT提取效果不佳,双臂路灯点位平面误差较大,而点位高程误差较低,可能是因为利用全站仪对双臂路灯进行偏心测量时,观测误差较大。因此,对于道路全息测绘,TOPODOT智能提取在提取精度上可以满足项目需求;在工作效率方面,若不考虑图层定义、图形符号制作、智能提取模板制作和属性列表定义等前期内容,TOPODOT可以实现人机交互式提取,极大降低了矢量图制作所需人力、时间。

表1 道路要素智能化提取点位精度分析表
4.结束语
综上所述,为了更好地解决道路全息测绘智能化提取程度不高、属性不易扩展的问题,本文采用TOPODOT软件进行全要素地形绘制,以广州某道路数据为例,并对绘制结果进行点位精度分析。通过分析,验证了点要素、线要素和面要素智能提取的准确性,为今后道路全息测绘工作提供了重要的参考数据。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
军事文摘(2022年8期)2022-05-25
建材发展导向(2021年22期)2022-01-18
娃娃乐园·综合智能(2021年2期)2021-03-10
航天制造技术(2020年4期)2020-09-11
少儿美术(2019年11期)2019-12-14
建材发展导向(2019年10期)2019-08-24
神州·上旬刊(2018年5期)2018-06-05
证券市场红周刊(2018年37期)2018-05-14
电子制作(2017年9期)2017-04-17