交通指挥中心无人机远程控制台设计*
2022-07-20 05:57孟繁和尹沫洋吕潭徐奥林
数字技术与应用 2022年6期
孟繁和 尹沫洋 吕潭 徐奥林
1.安徽科力信息产业有限责任公司;2.城市交通管理集成与优化技术公安部重点实验室;3.安徽省智能交通重点实验室
随着我国机动车保有量快速增加,交通拥堵治理和交通安全管控是交通指挥中心面临的关键挑战。特别是节假日期间高速公路因事故造成的拥堵事件时有发生。无人机具有机动性强,感知范围广的特点,但传统无人机在高速公路管理中的应用,主要通过飞手现场手动控制方式,仅支持视距范围内控制,无法为交通指挥中心提供及时有效的现场观测信息。随着5G 无线通信和北斗精确定位技术的推广应用,借鉴军用超视距无人机应用方式,探索交通指挥中心远程控制无人机的应用,本文将详细说明交通指挥中心无人机远程控制台设计。
1 目前高速公路无人机应用存在的主要问题
目前,交通指挥中心人员无人机应用主要是被动看现场回传的视频,在实际应用中,由于后台人员操控技术要求高、不能掌握现场飞行环境状况,易发生飞行事故,造成操作人员心理负担大,难以展开常态化应用。高速公路无人机的应用仍然停留在现场手动摇控的阶段,没有融入到整个交通巡逻管理过程中统一管理起来,不能快速地形成实时的事件勘察与评估。因此,迫切需要解决交通指挥中心开展无人机交通巡逻一体化装备的问题。
国内民用无人机控制台研究尚处在起步阶段,本文借鉴军用无人机远程控制台设计思路,通过研究无人机远程控制台结构和布局、优化操作过程便捷性、提供更多安全预警信息避免操作差错,以此来实现无人机巡逻的装备化、可视化能力,真正融入到高速公路交通管理的过程中。
2 控制台系统组成及说明
交通指挥中心远程无人机控制台整体组成包括2 大部分:控制台台面人机操作交互系统和控制台内部主机控制系统,配合现场无人机和无人机停机坪环境监测系统共同形成应用。台面人机操作交互系统由显示单元、声光预警单元、矩阵以及操作飞行手柄等组成。内部主机控制系统细分为飞行控制主机、任务管理主机、工控主机、PLC 可编程逻辑控制器以及网络交换设备组成,其中工控主机除了监测预警安全信息,还要提供无人机实时视频接收和视频分析任务,配置可扩充GPU 芯片嵌入式系统,满足深度学习、AI 智能监控需求,实际配置英特尔®Coffee Lake 平台C2466 芯片组技术,搭载NVIDIA Turning™架构的嵌入式系统,配备RTX2080i 高性能显卡。
3 控制台设计
控制台设计主要从应用流程制订、布局结构设计、人机交互设计几个方面开展设计工作。
3.1 应用流程
控制台应用流程设计如图1 所示。
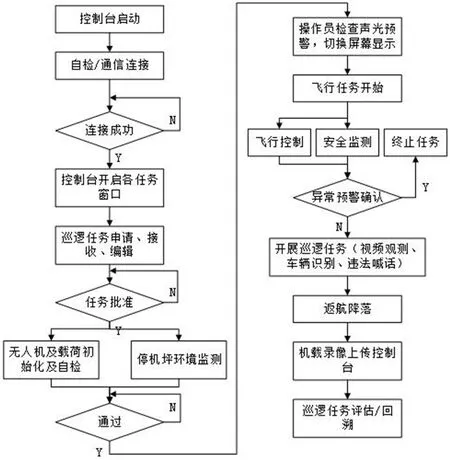
图1 控制台应用流程图Fig.1 Console application flow chart
3.2 结构设计
3.2.1 设计原则
(1)符合人机工程原则。无人机远程控制台结构设计中,按照人机工程原则,考虑人、机器及环境三者间的协调,考虑人员操作姿势的舒适,避免操作姿势不应当引起过度疲劳。例如台面高度和显示视域参考国标GB/T10000 成年人坐姿尺寸,符合操作人员平均水平、腿部预留伸展空间等。
(2)适合交通指挥中心环境原则。控制台样式、色调、材质应与交通指挥中心整体环境相适应,不要有尖锐折角,另外,交通指挥中心大多建设在既有建筑高层,控制台各模块尺寸要能够适用普通载人电梯内部尺寸,方便运输安装。
(3)预定功能性原则。需要简化操作复杂度,由单人即可完成高速公路无人机远程飞行任务,提供操作员飞行安全信息感官反馈。
3.2.2 布局设计
现有军用无人机控制台,由于飞行任务多变,操作人员大多数时间使用飞控手柄和加速杆操作飞行,键鼠使用频率低,大多采用抽拉键盘设计。但交通指挥中心无人机控制主要是沿高速公路巡线应用,航线规划后飞行任务变动少,飞控手柄和加速杆使用频率低,而键鼠使用频率高,本文根据这一特点针对台面布局做出优化设计。
控制台台面布局划分为:(1)主显示区:设置一台24寸高清液晶显示器,作为无人机飞行操作主界面;(2)辅助显示区:设置二台24 寸高清液晶显示器,作为任务管理、安全监测辅助界面;(3)预警提示区:设置警示灯和蜂鸣器,用于声光报警;(4)操作手册提示区:表面用于固定安全操作手册,内部做为喊话耳麦收纳空间;(5)开关、矩阵切换区:设置矩阵用于显示内容切换,开关机按钮,输入输出接口等;(6)操作台面区:右侧为飞行手柄模块,中间为无线键鼠操作,左侧为加速杆模块(如图2 所示)。
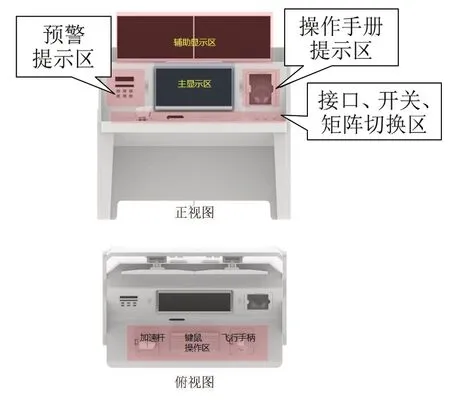
图2 控制台台面布局图Fig.2 Console table layout
3.2.3 结构设计
军用无人机控制台因为需要满足机载、车载应用,结构抗震要求高,多采用整体钢结构框架,而高速公路无人机控制台在交通指挥中心使用,不需要考虑结构抗震,更多需要考虑操作人员舒适性以及和整体环境协调性。结构设计如图3 所示,主要设计特点有:
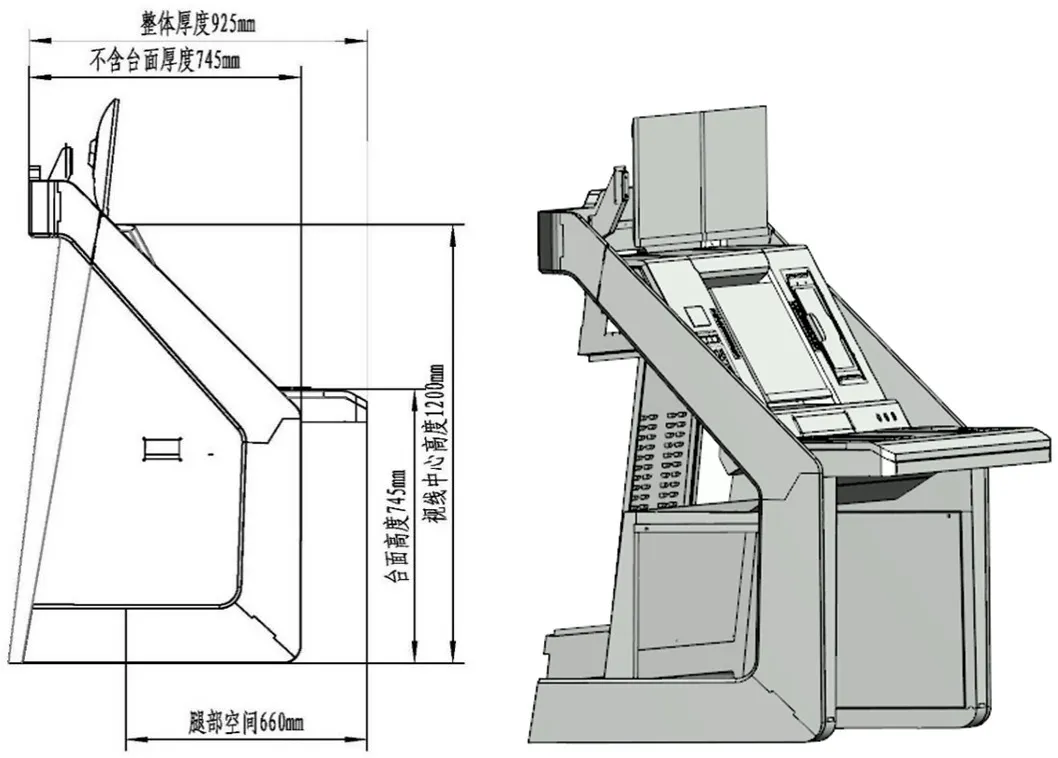
图3 控制台尺寸及结构图Fig.3 Dimensions and structure of the console
(1)台面高度、腿部空间参考国标GB/T10000,符合中国成年人坐姿尺寸;
(2)显示视域中心设计高度1200mm,上下显示器俯仰角度可在±20°范围调整,符合操作人员平均水平;
(3)控制台台面模块采用拼装件设计,运输搬运宽度控制小于800mm,可以出入各类电梯;
(4)控制台底部后侧设计一组暗装滚轮,操作人员可以灵活整体移动;
(5)控制台结构采用薄钢板钣金件,表面喷塑处理,显示器支架、滚轮采用标准件,储物网孔门采用3D 打印件。整体设计没有尖锐折角。
3.3 交互设计
3.3.1 显示区人机界面
无人机控制台提供重要的任务指引、飞行参数等信息,是操作人员远程控制无人机的主要依据。传统无人机地面站通常采用双屏显示,操作人机界面分为飞行控制界面和实时视频画面,同时叠加飞行参数等安全信息。但是在交通指挥中心远程控制无人机执行任务时,双屏显示存在很多缺点,主要有无法及时获取地面起降环境信息、不能实时掌握巡逻任务执行情况等。远程控制台设计采用三屏显示,人机界面优化为图4(a)多机巡逻任务管理平台、图4(b)地面起降环境监控系统、图4(c)无人机实时飞行控制三部分。

图4 (a)多机巡逻任务管理平台Fig.4 (a) Multi-machine patrol task management platform

(b)地面起降环境监控系统Fig.4 (b) Ground takeoff and landing environment monitoring system
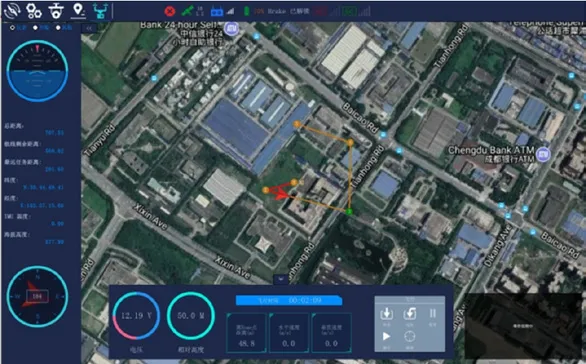
(c)无人机实时飞行控制Fig.4 (c) UAV real-time flight control
图4(a)多机巡逻任务管理平台:任务执行前申请、接受巡逻任务,对无人机设备及人员管理,基于地图显示任务规划航线、无人机位置状态、空域限制信息提醒、地面相关警车警员位置;任务执行过程中通过可视化交互设计,实时显示无人机当前任务进展,关键节点到位情况,即将执行的飞行动作,同时可以叠加机载视频分析图像、地面视频图像;任务执行结束,保存各项任务记录,进行数据统计分析,显示飞行数据分析结果,机载数据上传保存结果等信息。
图4(b)地面起降环境监控系统:在起飞、降落阶段,接收、显示前端停机坪监控摄像机、风速传感器、定位差分仪、电源控制设备传回来的各类传感器数据,在飞行巡逻阶段切换为机载视频图像信息。
图4(c)无人机实时飞行控制:飞行前根据巡逻任务规划航线、航点,设置各项飞行参数、载荷动作,显示起飞前通信、定位、电气参数;飞行过程中,实时飞行界面包含实时地图、实时图像、飞行控制、仪表显示、载荷控制等实时窗口,可以显示当前飞行模式、无人机经纬度、海拔高度、卫星星数、电池状态,切换可以显示无人机图像和喊话器当前语音等信息。
3.3.2 预警提示区
声光报警于日常生活常见,例如乘坐电梯超载预警、地铁开关门预警,符合人机工程,普通人员简单培训即可掌握,在远程控制台面板设计声光预警提示区,可以降低人员操作负担,提高飞行安全性,如图5 所示。
预警提示区设置在控制台左侧,将飞行任务执行过程中要关注的关键信息,通过声光报警方式给操作人员提醒。具体预警信息有:
(1)飞行阶段提醒:对应起飞准备阶段、飞行巡航中、飞行着陆阶段。起飞准备阶段灯光常绿表示正常状态,黄闪表示当前GPS 精度、电压或现场风速异常,灯光熄灭表示未连接无人机。飞行着陆阶段灯光常绿表示进入差分连接状态,黄闪表示差分断开或偏航,灯光熄灭表示尚未进入着陆阶段。
(2)飞行安全预警:对应飞行巡航阶段中,无人机实时电量、高度、偏航预警。灯光常绿表示正常状态,黄闪表示异常,同时蜂鸣器声音同步报警,灯光熄灭表示未起飞。
(3)飞机任务提醒:视频分析状态是对应无人机视频分析检测高速公路事件,常绿表示正在检测中,黄闪表示发现高速公路异常事件,提醒操作人员注意,灯灭表示不在检测中。录像状态是提醒操作人员及时开启和关闭视频载荷录像。数据状态是提醒操作人员后台通信服务是否正常。
4 设计成果
无人机远程控制台设计试制成果如图6 所示。在实际应用中,远程控制台实现了高速公路无人机远程超视距现场观测、飞机及载荷性能状态安全监测、巡逻任务信息提醒,并通过声光信息反馈,减轻无人机远程操作人员负担,达到了设计预期。

图6 控制台首台套图Fig.6 The first set of consoles
5 结语
无人机远程控制台解决了交通指挥中心无法常态化开展高速公路无人机应用的问题。该控制台具有以下特点:(1)集成度高,单人可以远程安全操作无人机,完成高速公路巡逻任务;(2)三屏交互显示主次分明,内容清晰,提高了操纵人员获取信息的效率;(3)增加视觉和听觉信息反馈,为无人机飞行安全提供给操作者一定的帮助;(4)参考了人机工程学设计原则,提高无人机操作效率,降低了人员长期使用疲劳感;(5)可拆卸台面模块设计,尺寸、样式适应交通指挥中心工作环境。
引用
[1] 张玉刚,薛红军,栾义春,等.无人机地面控制系统操作员控制台设计与仿真[J].火力与指挥控制,2008,33(10):141-143.
[2] 张峻霞,王新亭.人机工程学与设计应用[M].北京:国防工业出版社,2010.
[3] 黄育龙,余隋怀,杨延璞,等.无人机地面控制台人机布局优化设计[J].图学学报,2013,34(2):89-93.
[4] 邓红德,李兴岷,王亮.超视距遥控无人机飞行控制台设计与实现[J].计算机测量与控制,2011,19(11):2702-2704.
猜你喜欢
军事文摘(2022年20期)2023-01-10
英语文摘(2021年11期)2021-12-31
今日农业(2019年12期)2019-08-13
学生天地(2018年19期)2018-09-07
意林·作文素材(2018年11期)2018-07-19
现代园艺(2017年22期)2018-01-19
中国交通信息化(2016年7期)2016-06-06
火控雷达技术(2016年3期)2016-02-06
军事历史(1986年4期)1986-08-21