基于动态散斑干涉的数字全息成像技术研究
2022-07-19 09:33陈健兵文永富
影像科学与光化学 2022年4期
陈健兵,葛 磊,文永富
1.江西高瑞光电股份有限公司,江西 上饶 334100;2.北京理工大学光电学院,北京 100081
1 前言
在过去的几十年里,散斑干涉技术在电子散斑干涉测量(electronic speckle pattern interferometry,ESPI)和散斑剪切干涉测量(speckle shearing interferometry,SSI)领域得到了广泛的应用,以测量具有光学粗糙表面的物体的面内及面外位移和振动[1]。散斑场照明也被应用于其他各种光学成像领域,如结构照明显微镜(SIM)[2]、激光散斑对比成像(laser speckle contrast imaging,LSCI)[3]、近场傅里叶层析成像[4]、旋转相干散射(ROCS)显微镜[5]等。最近,由于动态散斑照明(dynamic speckle illumination,DSI)可有效减少、去除图像中的散斑噪声,该技术已被用于生物标本的光学轮廓测量和定量相位显微镜(QPM)[6-11]。这种类型的照明与传统光源如卤素灯、发光二极管(LED)和激光不同,其具有高时间相干性与较低的空间相干性、高空间相位灵敏度、可扩展的视场(FOV)和分辨率以及高空间带宽积[6-16]。
在干涉测量的早期,由于没有像激光这样的纯单色光源,研究人员采用针孔对热光源、白光(WL)进行空间滤波,以提高了光源的空间相干性,但这以巨大的强度损失为代价。此外,白光光源具有较大的光谱带宽,即由大量单色光谱分量组成,将干涉条纹限制在相机有限干涉视场(interference field of view,iFOV)中。此外,它还使得QPM光路的搭建相对困难,主要要求参考光和物光两路光程差要几乎相等,以匹配光源时间相干长度(TC)(1~2 μm)内的光程。人们可以通过使用窄带通发光二极管或在白光光束路径中插入光谱滤波器[也称为过滤白光(FWL)]来增加iFOV,但代价是强度进一步损失。相反,窄带激光器克服了有限iFOV的限制,如白光、过滤白光的情况。然而,由于激光的时间相干长度很长,不可避免会产生相干噪声和寄生条纹,导致图像质量降低。因此,它降低了系统的空间相位灵敏度和测量精度。与传统光源相反,DSI具有高时间相干长度和低空间相干(SC)长度。与传统光源不同,DSI的高时间相干长度和低空间相干长度有助于在整个相机FOV上实现相干无噪声干涉图案。
尽管DSI优于传统光源,但动态散斑照明定量相位显微镜(DSI-QPM)较为受限,可能是由于缺乏深入了解。在DSI-QPM中,当物光散斑场和参考光散斑场相互叠加时,必须生成相关散斑场以形成干涉图案[11]。然而,DSI-QPM系统中干涉条纹的获得,对于实验条件存在一些常见的误解[14,15]。
本文基于DSI-QPM搭建了反射式离轴光路系统和透射式共光路离轴干涉系统,分别对USAF1951(表面镀铑高度为110 nm)标准分辨率版和人体红细胞进行了相位成像。同时对比分析了DSI-QPM系统的时空噪声。首先,对于反射式结构而言,DSI-QPM系统的空间噪声(1.89 nm)和时间噪声(0.56 nm)均显著小于激光照明QPM系统空间噪声(16.78 nm)和时间噪声(21.54 nm)。其次,为了验证DSI可以在整个相机FOV实现相干无噪声干涉图样,本文还搭建了动态散斑照明的共光路离轴干涉系统并对比分析了动态散斑与卤素灯照明的时空噪声。结果表明,本文采用的基于动态散斑干涉的数字全息显微系统具有低空间相干性、高空间相位灵敏度、可扩展的视场(FOV)和分辨率等优势。
2 原理
多个随机相位复杂分量的叠加导致3D空间中的不规则图案称为散斑图案,这是一种粒状结构。时空单个点的叠加散斑A(x,y,z)分布可用式(1)表示:

(1)

(2)
图像平面上的平均散斑大小可以由式(3)给出:
d=1.22(1+M)λF
(3)
式中,λ为照明波长,M为光学系统放大倍率,F为透镜的f-数(焦距/有效孔径)。
被测物体的物光波A1(x,y)和参考光波A2(x,y)在CCD上进行干涉,形成干涉全息图,其干涉条纹的强度分布见式(4)。
H(x,y)=|A1(x,y)|2+|A2(x,y)|2+
2·|A1·A2|cos(Δφ+x·ksinα)
(4)
式中,Δφ为相位差,k和α分别为波数和离轴干涉角。
如果在探测器的积分时间“T”内对大量随时间变化的散斑场进行平均,则积分强度可用式(5)表示:
(5)
在全息再现过程中,可以通过算法将被测样品的强度信息和相位信息恢复出来。全息再现算法有菲涅尔积分变换法、卷积法、角谱法等[16-19],本文采用角谱法对全息图重建,由于其在推导过程中不存在限制近似条件,故该方法可以实现对衍射光波的准确描述。角谱法对全息图重建得到的物光波复振幅分布,见式(6)。
(6)
式中,fx=x/λd,fy=y/λd,d为再现距离,λ为波长,F{·}、F-1{·}分别表示傅里叶变换和傅里叶逆变换。最终再现像的光强和相位分布分别为:
I(x,y;d)=|O(x,y;d)|2
(7)
(8)
式中,Im表示取复振幅的虚部,Re表示取复振幅的实部。
以反射式为例,假设物体的高度为h,那么对于波长λ记录下的数字全息图,数值重建得到的相位分布可以表示为式(9)。
(9)
其中,φ0是位于[0,2π]之间的主相位,m为非负整数,n为样本折射率,n0为空气折射率。式(9)中的m·2π表示2π包裹相位的个数为m。如果m=0,则相位图中没有包裹相位。由式(9)可得待测物体的高度,见式(10)。
(10)
3 实验装置与结果
为了验证动态散斑干涉全息数字全息成像系统的可行性,实验分别采用反射式离轴数字全息系统和透射式共光路离轴数字全息系统。用于记录的激光器为λ=660 nm的半导体激光器,所用CCD为黑白相机,其分辨率为2592×1944,像素尺寸为2.2 μm×2.2 μm。
反射式光路结构如图1所示,激光器发出的激光经旋转毛玻璃(粒度2000)后进入MO1(25× NA = 0.4),之后经过空间滤波器(SF)和准直镜(L1,f=50 mm)进行扩束准直。光束准直后由透镜L1(f=150 mm)进行傅里叶变换,经分光棱镜(BS)后分为两路:一路经MO2(40× NA=0.6)后照射样本,一路经MO3(20× NA=0.5)后照射可调节反射镜。物光由样本反射后经物镜、分光棱镜直接投射到CCD(daA2500-14 μm,Basler)上,参考光则通过调整反射镜引入载波。最终参考光以一定夹角与物光形成离轴干涉,干涉图样如图2所示。为了验证该系统具备可拓展的分辨率和视场,该实验中的MO2和MO3并不相同,这亦说明了该系统可实现20×~40×的可调分辨率。

图1 反射式动态散斑干涉的离轴全息装置图图中MO1~3为物镜;SF为空间滤波器;L1-2为透镜;BS为分光棱镜;M为反射镜

图2 反射式动态散斑照明(a)和激光照明系统(b)采集全息图对比
为了验证反射式系统的时空特性,本文以10 frame/s的帧率对图2(a),(b)各采集了300张全息图进行分析。系统中CCD获取的全息图尺寸大小为2592×1944,由于计算量太过庞大,为此各截取了300张相同位置820×850无物体区域,用来计算该系统的时空噪声。用相位重构算法解出300张全息图的相位展开图。将第一张全息图重构出的相位图作为背景相位图φ0(x,y;0),其余重构出的相位图φ(x,y;t)减去该背景图,即Δφ=φ(x,y;t)-φ(x,y;0),可以得到299张去掉背景噪声后的相位图。由光程差Δδ=λ·Δφ/2π,可以计算得到系统的随机光程分布(optical path difference)。对299张随机光程分布图的任一张求均方差,即为该时刻的空间噪声。图3(c)为图3(a),(b)的光程分布直方图。对299张随机光程分布图的所有像素求均方差,即为系统的时间噪声。图3(d)为299张随机光程分布图所有像素的直方图。共聚焦显微镜标定结果见图4(c1)~图4(c4),可以看到USAF1951分辨率版的镀铑表面高度为110 nm。从图4(a1)~图4(a4)可以看到,该系统的散斑噪声得到了抑制,表明该系统具有较低的空间噪声,这说明动态散板干涉系统具有良好的测量精度。同样,离轴全息成像系统(DSI-DHM)时间噪声为0.56 nm,这表明该系统同样适合于长时间观测,同时还可以避免激光引入的散斑噪声。
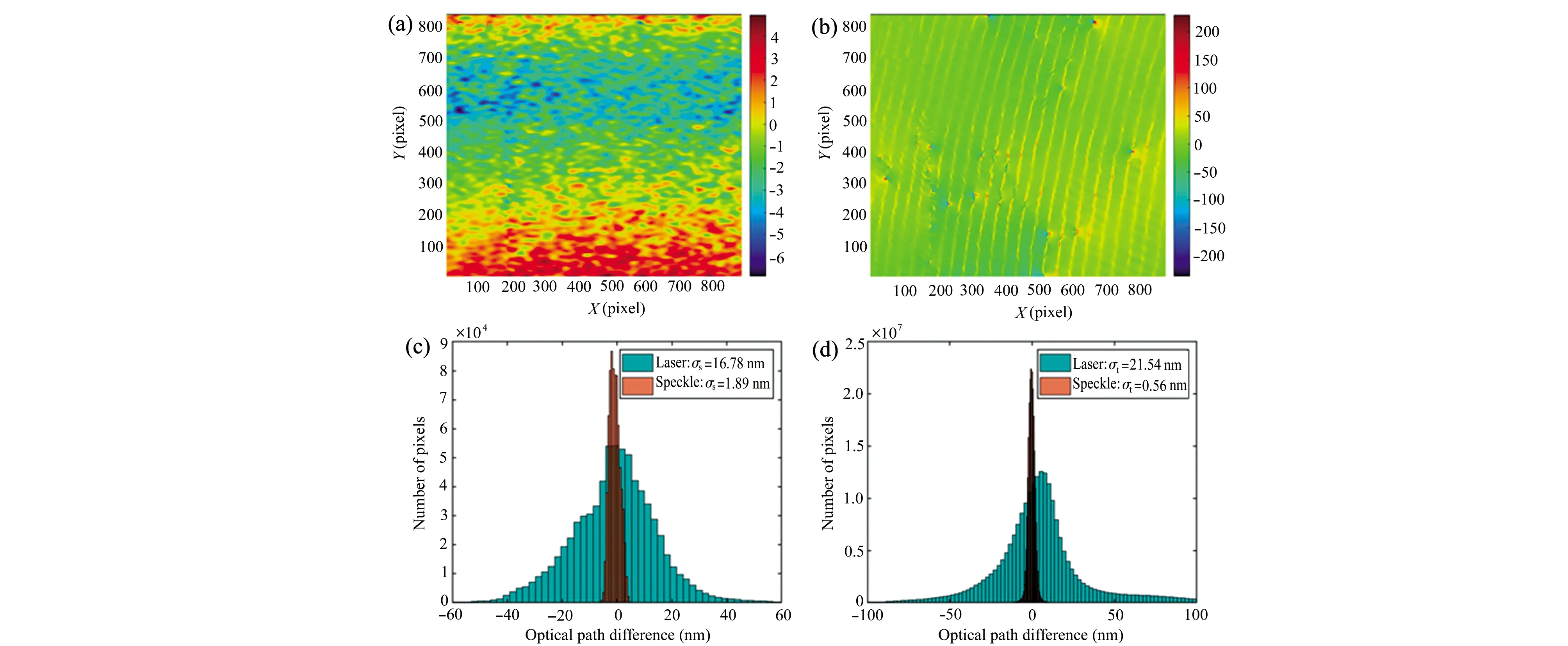
图3 反射式系统时空噪声分析(a)、(b)分别为散斑照明和激光照明系统随机光程差;(c)为散斑照明和激光照明系统的空间噪声分布;(d)为散斑照明和激光照明系统的时间噪声分布
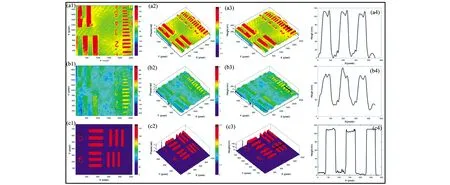
图4 图3(a)、(b)系统重建结果比较图(a1)、(b1):重建得到的USAF1951分辨率版强度图;(a2)、(b2):三维相位图;(a3)、(b3):三维高度图;(a4)、(b4):黑色实线处高度分布曲线;单像素尺寸为123 nm;(c1)~(c4)为共聚焦显微镜标定结果,单像素尺寸为94 nm;上述所有数据均为USAF1951分辨率版第6组
透射式光路结构如图5所示,激光器发出的激光经旋转毛玻璃(粒度2000)后进入MO1(25× NA=0.4),之后经过空间滤波器(SF1)和准直镜(L1,f=50 mm)进行扩束准直。准直光束经过L2聚焦后照射样本,携带样本信息的光束经物镜后成像,像平面于一维光栅表面重合。像平面光波经一维光栅(100 lp/mm)后发生多级衍射,为了方便阐述,图示只显示了0级衍射级次和+1级衍射级次。这样携带有物体信息的平行光束经过一维周期光栅后发生多级衍射,各级衍射光经过透镜L3,在透镜L3的傅里叶频谱面上可以得到各级衍射光的频谱信息。采用空见光滤波器(SF2)将其他级次衍射光全部去掉,仅保留0级衍射光的低频信息和+1级衍射光的全部频谱信息。因此,+1级衍射光携带有被测物体的相位信息,作为物光波;0级衍射光没有携带被测物体的相位信息,作为参考光波;由于0级衍射光(参考光波)和+1级衍射光(物光波)存在夹角,且满足相干条件,因此会在成像探测器靶面上发生干涉,形成离轴全息图,并由成像探测器记录。

图5 透射式动态散斑干涉的共光路离轴全息装置图MO为物镜;SF1,2为空间光滤波器;L1~3为透镜
为了验证透射式共光路离轴干涉全息系统的时空特性,本文以10 frame/s的帧率对分别采用动态散斑照明和热光源卤素灯照明的离轴干涉全息系统各采集300无物体全息图进行分析,计算方法与上述反射式相同。图6(a)和图6(b)分别记录了同一时刻卤素灯照明和动态散斑照明系统的随机光程差,为了便于直观比较,色阶图范围均设置为[-1,1]。可以看到,动态散斑照明系统的空间噪声(0.0826 rad)和卤素灯照明系统的空间噪声(0.0550 rad)相差不大。这说明激光的散斑噪声得到了很好的抑制,且可以直观地从图6(b)看出其空间噪声主要由衍射条纹引入。这是因为对于特定波长的激光动态散斑而言,其时间相干(TC)长度几乎和同频激光光源时间相干长度没有区别,且其空间相干长度在空间光滤波器的调制下得到了提升。这也解释了激光动态散斑干涉系统为什么可以克服传统热光源有限干涉视场(iFOV)的局限。采集的300张全息图,在时间尺度上为30 s,图6(c)描述了每个时刻系统对应的空间噪声,对所有时刻的空间噪声求均方差即为该系统的时间噪声。由于动态散斑系统和卤素灯系统波长不一致,因此下述为了较为统一比较,均采用相位噪声。从图6(c)可以看到,动态散斑系统的时间噪声(1.51 mrad)明显高于卤素灯系统的时间噪声(0.17 mrad)。同样,可以根据式(10)将相位转换为高度。经换算,动态散斑系统的时间噪声为0.158 nm,卤素灯系统的时间噪声0.0156 nm。也就是说,动态散斑系统的相位灵敏度相对较弱,这一定程度受到了旋转散斑片带来的机械式干扰。一般来说,在实际测量过程中旋转散斑片机械式的震动不可避免。因此,一方面,需要尽可能在旋转散斑片组件中添加防震片同时和光路结构隔离开;另一方面,可以积极探讨非机械式降低激光相干性的方法。

图6 透射式共光路离轴干涉系统时空噪声分析(a)、(b)分别为卤素灯照明和动态散斑照明系统随机光程差;(c)为卤素灯照明和动态散斑照明系统所有时刻的空间噪声
对于动态散斑照明的透射式共光路离轴干涉系统,本文采用人体红细胞进行定量测量,其中成像物镜为20倍。从图7(a)可以看到,参考光透过空间滤波器后发生了衍射,给全息图引入了一定的条纹噪声。这是因为,对于动态散斑而言,其相干长度太短不足以实现非共光路结构的离轴干涉。从图7(b)重建的相位图像可以看出,激光散斑噪声得到了较好的抑制。同样,该系统利用传统发光二极管(LED)照明亦可实现,且空间相位灵敏度更高。但是,如果同时兼顾荧光成像模块,那么系统仍需特定波长的动态散斑照明。所以说,相较于传统LED照明系统,DSI也并非完全处于劣势。对于此透射式共光路点衍射相位成像系统而言,DSI具有高时间相干长度和低空间相干(SC)长度。与传统光源不同,DSI的高时间相干长度和低空间相干长度有助于在整个相机FOV上实现相干无噪声干涉图案。

图7 透射式动态散斑照明共光路离轴干涉系统测量结果(a)系统采集全息图;(b)重建相位图;(c)图7(b)中黑色方框内局部放大三维图;(d)图7(c)中黑色虚线描述的高度二维轮廓图
4 总结
本文从实验出发,初步验证了DSI的可行性,反射式系统展示了它在离轴数字全息显微镜的物光路和参考光路中使用不同物镜的能力,而不会降低干涉条纹对比度,并提供了使用用户定义的显微镜物镜的灵活性,从而提供优于低时间相干光源的竞争优势。同时,透射式动态散斑照明系统可以同时兼顾LED成像功能,同时还可以直接作为荧光成像照明,这对于集成式多模态显微镜显得尤为重要。实验结果初步验证了基于DSI数字全息系统具有低空间高时间相干性、高空间相位灵敏度、可扩展的视场(FOV)和分辨率等优势。为了进一步提高动态散斑照明的空间相位灵敏度,机械式的旋转散斑片并不可取,这会给光源带来一定的扰动从而降低系统的空间相位灵敏度。因此,全新的非传统机械式的降低激光相干性的方式亦值得探索。
猜你喜欢
军事文摘(2022年8期)2022-05-25
家庭影院技术(2021年9期)2021-11-05
知识就是力量(2021年9期)2021-09-18
上海工艺美术(2021年4期)2021-04-24
家庭影院技术(2021年2期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
劳动保护(2019年3期)2019-05-16
饮食科学(2016年7期)2016-07-27
扬子江(2016年1期)2016-05-19
太空探索(2015年3期)2015-07-12