
无摆式船用机械倾斜仪设计
2022-07-19 06:38江儒敏蒋祖星
船海工程 2022年3期
江儒敏,蒋祖星
(广东交通职业技术学院 海事学院,广州 510800)
舰船倾斜数值作为航行和停泊时船体态势的重要度量指标,其精度关系着船舶航行安全和货运质量。目前,船舶倾斜数值主要依靠对吃水的实地勘察获取,作业风险和成本较高,劳动强度大;利用船用倾斜仪指示实现倾斜状态的数值读取成为重点研究方向。传统船用机械式倾斜仪的指示精度一般为1°,船用钟式倾斜仪的分度值达到5°,精度低、误差大;陆用高精度倾斜仪由于船舶在不均布载荷和海浪的随机作用下发生不规则横倾运动,很难建立精确的数学模型,无法使用于船舶。现有研究中,为提高测量精度,对机械式倾斜仪主要通过加长摆臂、管/舱式连通等方法,存在构造复杂、使用和维护成本高等问题;船用电子横倾仪主要通过高精度液位测量仪比对液舱液面以提高精度,高压电源的应用难以满足船舶应急条件下使用和便携性的需要;部分电子倾斜仪通过电容敏感器件和光电检测双色扇摆技术监测船舶的横摇频率,对倾角的精度更是没有考究。为克服已有的研究难以兼顾精确性、可靠性和便捷性的不足,基于机械倾斜仪原理提出无摆船用机械倾斜仪的设计方案,利用重球或浮球与弧线轨道的结合实现无摆设计,通过摆臂半径的放大提高精度,利用浮力形成悬浮效果以减小系统误差,以满足船舶实际需求。
1 设计思路
1.1 无摆式设计
无摆倾斜仪系统组成见图1。
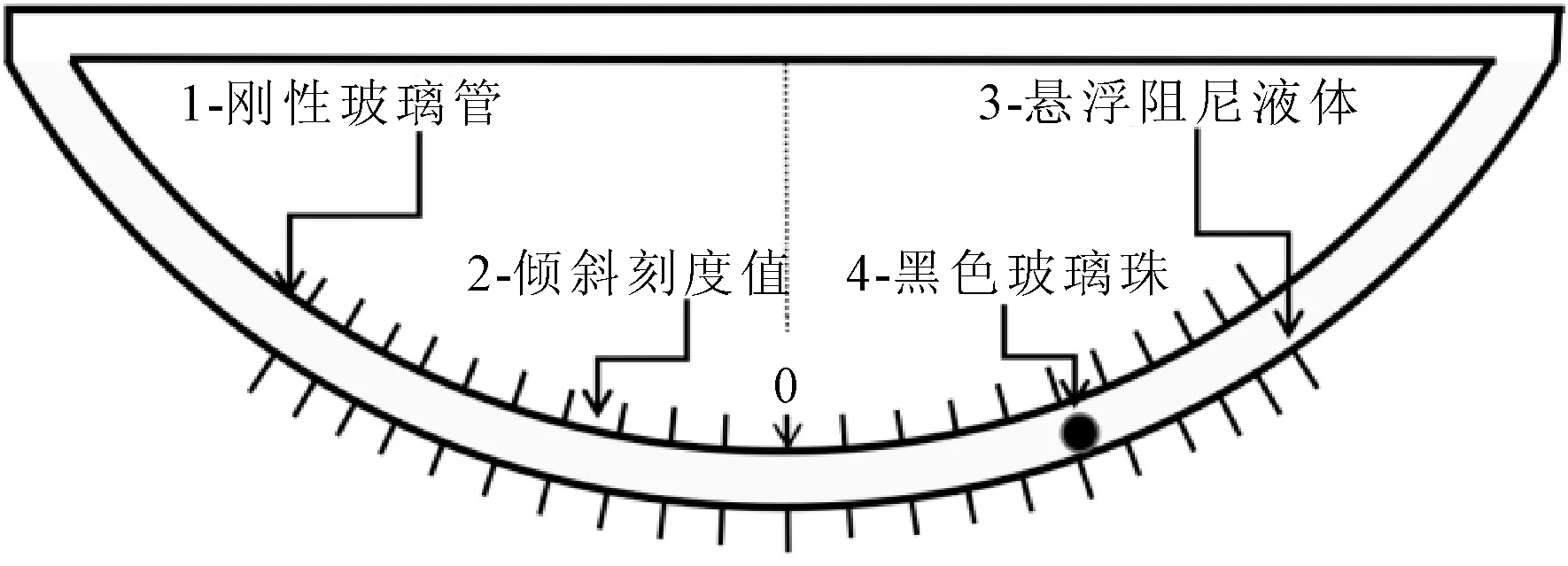
图1 无摆式机械倾斜仪系统组成
该设备由一段半径与船宽成一定比例的圆弧形刚性石英玻璃管,管上带有以mm为单位的刻度线,并在刻度线上端和下端分别标示船舶发生倾斜的横倾角度和两舷吃水的差值;管内装有液体,以提供浮力和阻尼;一颗黑色玻璃珠放置于玻璃管内,黑色玻璃珠半径小于玻璃管内径,且内部按需设置中空,使其相对密度稍大于管内液体的密度。管路的上部连通具有固定弧形、储备液体和大倾角横摇时调整管内液体阻尼的作用。按需配置设备底板以提高设备总体强度以适于运输和安装,水平管一端开口并带有保持水密的封闭盖,以便于初始安装和后期的维护保养。
该设备在船上安装时需严格对准设备铅垂线与船舶平正时的水线面垂线,并安装在船舶的某一横截面的墙壁上。当船舶发生静态横倾时,黑色玻璃珠受到重力矩作用在管内移动,液体的阻尼将抵消船舶的不规则扰动和摇晃,黑色玻璃珠重心所指示的刻度即是船舶横倾的角度和两舷吃水的差值。
1.2 无摆设计原理
无摆倾斜仪沿用摆锤式倾斜仪原理,摆锤式倾斜仪实物图和原理分析见图2。
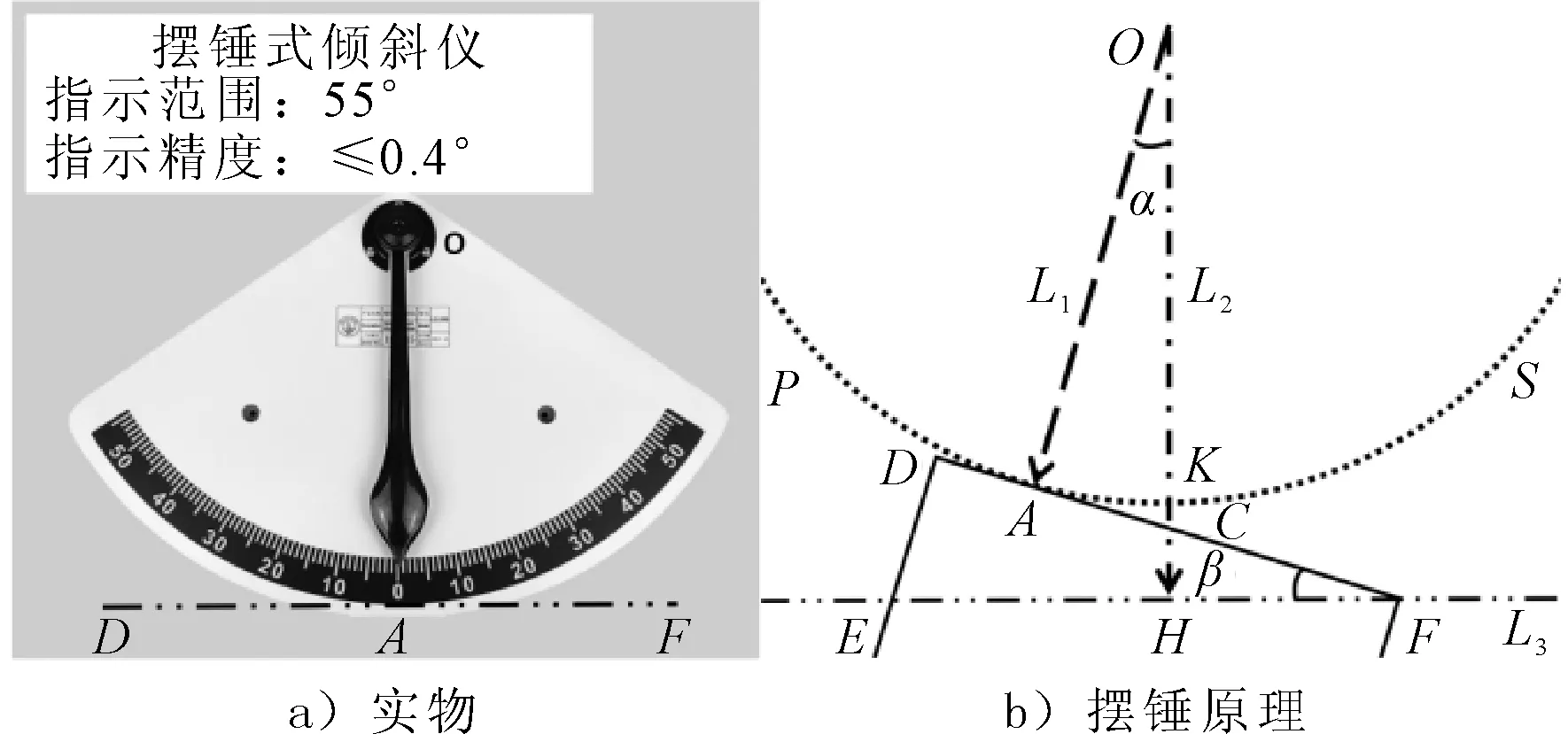
图2 摆锤式倾斜仪实物及原理示意
图2中,对比左右图,为倾斜仪的摆心,为摆臂,其长度为摆长,点为倾斜仪的0位,为船舶平正时水线面,其长度等于船宽,为船舶平正时的铅垂线;当船舶向右横倾角后,摆锤受重力矩作用,移动到位置,并与新的水线面垂直,并与形成夹角。在船舶倾斜过程中,实际水面并没有改变,点为与原水线面的交点,点为船舶倾斜后摆锤的顶点位置(即横倾后倾斜仪摆锤所指的数值刻度),点为与倾斜后水线面的交点。
参见文献[3]的论证和结论,根据直角三角形相似定理推断出:∠=∠,并且线段长度比例∶=∶,即倾斜仪的摆角等于船舶的横倾角,摆锤在划过的切线段与船舶倾斜后两舷吃水差值的比等于摆臂长度与船宽之比。
综合考虑所用材料、设备原理和船舶生活甲板层高,设置设备的弧形半径为2.50 m左右,根据现有海船的船宽范围为9.00~56.40 m,测算设备的放大比在1∶(3.60~22.56)区间,由于设备弧度最小刻度为1.00 mm,可确定设备数值精度范围为0.11~14.10 mm(6.8′~8.5′),完全满足船用倾斜仪设计规范±1°误差的标准要求,符合海船实际应用的精度需求。
1.3 系统误差的核定与修正
1)设计原理误差。无摆倾斜仪以弧的长度代替了线段长度作为倾斜数据,存在设计原理上的系统误差。船舶静态作业时横倾值一般控制在±3°,以目前最大海船的宽度56.40 m为例,船舶室内层高2.50 m,设备比例1∶20,摆长设计为2 820 mm,系统误差计算如下。

由计算结果判定,在船舶常态静倾角计算中利用摆弧替代横倾差值参数原理误差甚小,满足舰船的使用要求。
2)静摩擦力误差。无摆倾斜仪利用黑色玻璃珠代替摆锤,在船舶微倾时其与玻璃管内壁摩擦力的存在,会影响船舶微倾感应的灵敏度。解决方案如下:①通过加注液体增加浮力以减小重力和摩擦系数的影响。不透明石英玻璃密度范围为2.02~2.18 g/cm,水密度为1.00 g/cm。②通过使用空心玻璃珠,空心部分约占50%,以形成近似悬浮条件,消除摩擦力引起的系统误差。石英玻璃珠的摩擦系数为0.10,设定黑色玻璃珠半径为3.00 mm,摆长为2.50 m。计算得到抵消静摩擦力所需的横倾角为=4′,由此所形成的船舶倾斜数值误差11.60 mm
据此,该误差满足船舶倾斜仪的规范±1°的要求,完全达到适合舰船使用的±2.00 cm的需要。加之,船舶漂浮状态下的横倾扰动更有利于消除船舶静摩擦力的影响,实际精度优于精度计算结果。
2 测试与验证
2.1 灵敏度和精度测试
经过营运船舶修船和靠泊期间的多次测试,实验状态及次数见表1。
术后处理:两组术后切口常规换药,术后第2 d开始在不负重状态下进行患肢肌肉等长收缩训练和关节活动;待X线片检查提示有骨痂跨越骨折断端后开始部分负重(体重的10%~15%)训练,根据骨折类型和骨痂生长情况逐渐过渡至完全负重。
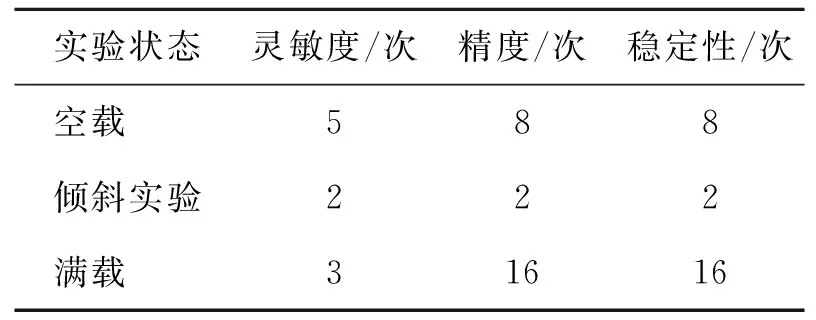
表1 实验状态及次数
2.2 结构与材质参数比对
参照CB-T 3376—2005《船用倾斜仪》的相关设计参数,统计现有5种不同类型船用机械式倾斜仪的结构与材质参数见表2。
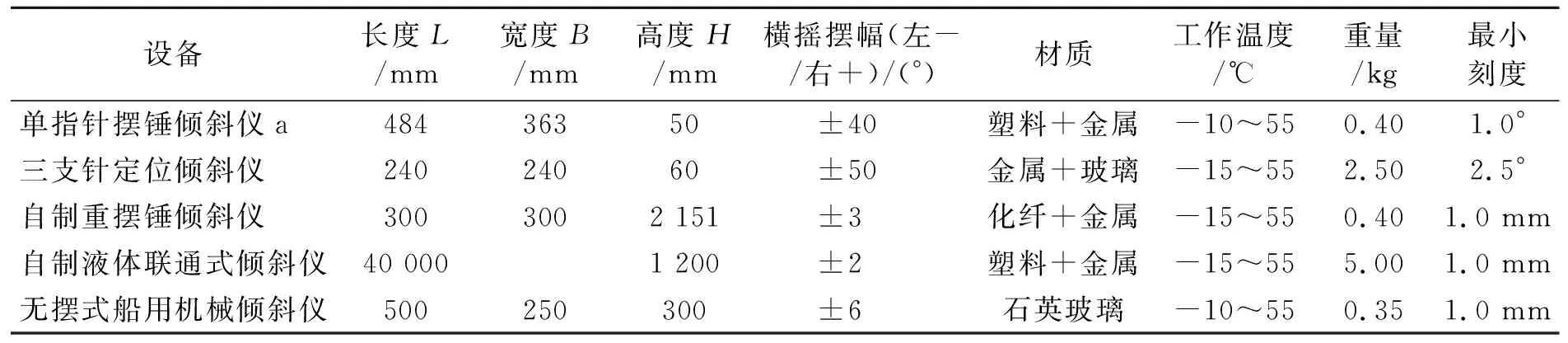
表2 5种倾斜仪结构与材质
实验以实际勘测水尺的横倾数值参数为基准,通过与现有各型号倾斜仪的横倾数值参数进行比对,核算船舶的综合性误差,以获得灵敏性、精确性和稳定性等参数。以巴拿马型船舶为主,船宽3 226 mm,设计摆长2 151 mm(比例1∶15),摆锤式倾斜仪表盘半径200 mm,钟式倾斜仪表盘半径100 mm。为便于性能比对,将角度参数统一换算成等效弧长数值参数。对比见表3。

表3 静止倾斜误差对照
2.3 综合性能分析
5种不同类型船用机械倾斜仪综合性能分析见表4。

表4 综合的性能分析
针对7项关键参数,依照性能优劣进行5分制评分。通过结构参数核定该设计的便捷性,可靠性;实船实验的灵敏度和精度等参数核定该设计的精确性;最终通过便捷性,可靠性和精确性等综合得分作为设计合理性的评价标准。
3 功能改进与拓展方案
3.1 浮力式改进
利用浮球代替设计方案中的玻璃珠,将设备倒置,进行适当调整可改进为浮力式无摆倾斜仪,见图3。
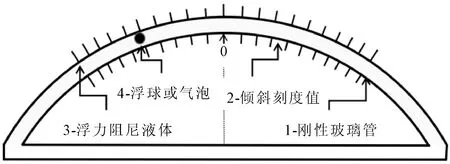
图3 浮力式无摆倾斜仪
图3中的浮球由于受到浮力作用球心与设备圆心连线的反向延长线将垂直于水面,适用于设备原理。浮球与管内壁的压力较重力小可有效减小摩擦力,有利于提高设备精度。考虑到设备中液体的热胀冷缩,设备开口应调整到顶端0刻度位置,并设置玻璃密闭盖,通过设置水密盖的角度保证管内的光滑程度,降低对设备精度的影响。
3.2 倾角信号输出
通过在弧形管内侧镶入3段电阻丝,分别为左舷段(P)、右舷段(S)和回路段(M),并引出测量端口。以摆球钢珠作为导体,钢珠所在位置不同则回路的电阻值不同,以电阻值的数值表达倾角的数值,从而实现倾角信号的转换与输出。考虑到设备中的电路安全问题,要求内部阻尼液体具有绝缘特性(油类),或者牺牲设备的精度不使用液体。原理见图4。
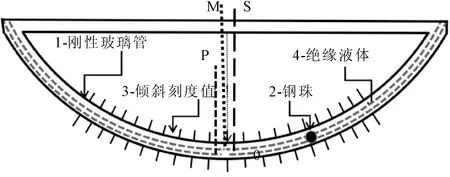
图4 倾斜角信号输出系统设计
3.3 构造与功能拓展
1)从构造拓展上看。本设计可以用水银滴替代设备中的黑色玻璃珠或钢球,或用气泡代替浮力式倾斜仪的浮球以实现同样的功能和效果。
2)从功能拓展上看。①本设计在舰船航行过程中可提供实时横摇角度和初步周期参数;②本设计若被安装在平行于船舶中纵剖面的立面上,则可提供船舶实时的纵倾角和数值,即为纵倾仪;③本设计可以广泛应用于吊杆、平台等易倾斜和摆动的设备;④本设计输出的倾角信号经过单片机进行处理后,可求算出船舶的横摇频率,从而实现对舰船横摇频率和稳性的监控。
4 结论
1)无摆式设计结构简单,机械结构不依赖电源,石英玻璃材料环保、成本低廉,液体阻尼设计惯性摆幅小,摆的半径放大读取误差小;本设计满足船舶对倾斜仪便捷性、可靠性和精确性的综合要求。
2)船舶倾斜数值作为无因次摇荡状态下的平均值,为降低所用液体温度及黏性对倾斜数值时效性和横摇周期准确性的影响,应使用黏度较小的煤油或水和酒精的混合液体,并按需设定适用温度范围。
3)基于机械系统摩擦的影响,设计精准有待结合浮力式设计进行提高。各型号无摆式船用机械倾斜仪均需要进一步完成形式论证与检测。
4)该设计倾角信号输出与横摇周期测量功能有待进一步研究、实验、完善与论证,结合现有电子设备与器件实现对船舶稳性的监控。
5)无摆式设计打破了传统倾斜仪的结构定式,为进一步探明应用机械原理克服舰船6个自由度无因次摇荡等复杂影响,实现船舶倾斜数据由测量改为读取的可行性。
