
模糊综合评价法在达芬奇手术机器人论证评估中的应用
2022-07-18 09:16王元李倩通信作者
医疗装备 2022年13期
王元,李倩(通信作者)
1 郑州大学附属肿瘤医院 (河南 郑州 450008);2 郑州大学附属儿童医院·河南省儿童医院·郑州儿童医院 (河南 郑州 450018)
达芬奇手术机器人又称“内窥镜手术器械控制系统”,是美国食品药品监督管理局(Food and Drug Administration,FDA)批准进入临床的首个机器人辅助腹腔镜手术系统[1-2]。自2000年Intuitive Surgical公司推出第一台达芬奇手术机器人后,已相继推出第二代(S)、第三代(SI)、第四代(XI)、第五代(SP)手术机器人,目前第五代手术机器人尚未在中国上市[3-4]。与传统开放手术及腔镜手术比较,达芬奇手术机器人最大的优势在于:(1)打破人眼的局限,放大的三维高清手术视野,便于医师进行精确定位及操作;(2)可转腕的手术器械,弯曲及旋转的程度远超过人手的极限,能在狭小空间操作较为精细的手术;(3)颤抖滤除功能可以进一步滤除人手的自然颤动,有效提高手术精度;(4)术者可以采取坐姿进行操作,利于进行长时间复杂手术[5-6]。达芬奇手术机器人正是凭其特有的优势,在手术机器人的全球市场表现突出,并在外科手术中被广泛应用。2020年底我国新增内窥镜手术器械控制系统的规划数量由154台增加至225台,增长46%[7]。规划配置数量的增加,使更多医疗机构有机会引进达芬奇手术机器人,但由于该设备具有投入资金大、运行成本高等特点,医疗机构应充分评估以避免盲目购置,造成资源浪费。但是医学装备配置评估过程中很多影响因素很难用清晰准确的界限区分,进而难以进行定量化评估。本研究通过探讨模糊综合评价法在达芬奇手术机器人需求评估中的应用,旨在为医疗机构科学合理配置该设备提供参考。
1 达芬奇手术机器人概况
1.1 达芬奇手术机器人组成
达芬奇手术机器人(da Vinci XI)主要由医师控制台、患者手术车及图像车组成,并与内窥镜、达芬奇专用器械和附件配合使用[8-10]。(1)医师控制台:外科医师通过使用手动控制器和一套脚踏板来控制手术器械和内窥镜的所有动作,同时可在三维高清立体观察窗上观察内窥镜图像,控制台还可以提供患者解剖部位和仪器的视图及图标和其他用户界面功能。(2)患者手术车:主要包括目标患者解剖定位的4条器械臂、吊杆、中心柱、基座等部件,内窥镜附接到任何器械臂上用于提供患者解剖部位的高清三维视图,吊杆是一个可调旋转支撑结构,可将器械臂移至适于目标解剖部位和患者体位的位置。(3)图像车:主要包括内窥镜控制器、视频处理器、系统电子设备、触摸屏等部件。
1.2 达芬奇手术机器人的应用
自2000年Intuitive Surgical 公司推出第一台达芬奇手术机器人以来,达芬奇手术机器人已经广泛地在多学科得到了应用,如泌尿外科、胸外科、心脏外科、普通外科或妇科等[11-12]。截至2020年4月,达芬奇手术机器人已在67个国家累计装机量达到5 819台,累计开展数百万例次手术,凭借其自身优势倍受外科医师的认可和推崇。
2 达芬奇手术机器人论证评估因素
评估因素从宏观因素、医院现状及预期效益3个维度出发,设置地区人口水平、经济水平、物价收费情况、医院功能定位、优势学科情况、年手术量及腔镜手术占比、人员资质、配套设施、投资回收期限、社会效益等10个维度进行评估。
2.1 宏观因素维度
宏观因素主要考虑地区人口水平、经济水平、物价收费情况等因素,具体情况见表1。
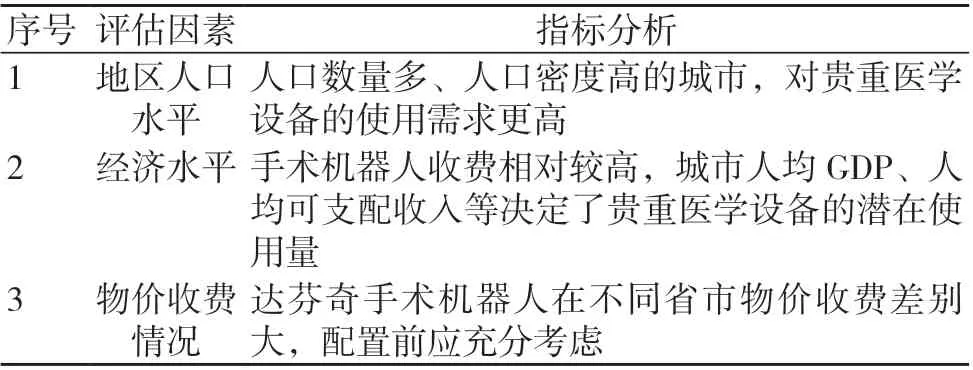
表1 宏观因素维度
2.2 医院现状维度
医院现状维度主要考虑医院功能定位、优势学科情况、年手术量及腔镜手术占比、人员资质、配套设施,具体情况见表2。
2.3 效益维度
效益维度主要考虑投资回收期限,社会效益等因素,具体情况见表3。
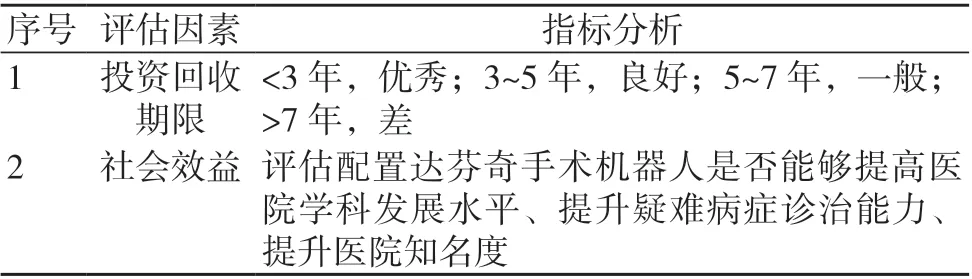
表3 预期效益维度
3 基于模糊数学的需求评估方法
模糊综合评价法是应用模糊关系合成的原理,将一些边界不清、不易定量的因素定量化,进行综合评价的一种方法,通过构造等级模糊子集,将反映被评价事物的模糊指标进行量化(确定隶属度),然后利用模糊变换原理对各指标进行综合评价[13],一般程序包括确定评估指标集合、确定评估指标等级、评价指标并建立模糊关系矩阵、模糊综合评价。
3.1 确定评估指标集合
指标集合U={U1,U2,…}={地区人口水平,经济水平,物价收费情况,医院功能定位,优势学科情况,年手术量及腔镜手术占比,人员资质,配套设施,投资回收期限,社会效益}。
3.2 确定评估指标等级
评估指标等级集合V={V1,V2,V3,V4,V5}={优秀,良好,一般,较差,差}。
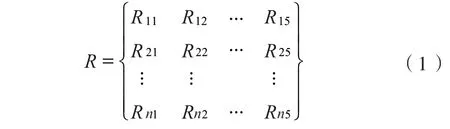
3.3 评价指标并建立模糊关系矩阵
对评估指标分别进行评价,确定该评估指标等级。各评估指标等级确定后,便可得到指标与指标等级的模糊矩阵R:
3.4 确定评估指标的权重
可以通过德尔菲法确定各评估因素权重,这种方法是通过匿名和反复征求意见的形式,让专家“背靠背”地充分发表意见,然后对所有专家的意见进行归类统计[14]。在专家意见比较一致的基础上进行数据处理,检验专家意见的集中程度、离散程度和协调程度,达到要求后,得到各评价指标的初始权重向量,再进行归一化处理,获得个评价指标的权重因子W={W1、W2.......Wn}。
3.5 模糊综合评价
评估指标的权重因子W与模糊关系矩阵R进行向量计算,向量计算得到最终的模糊综合评价结果:

4 评估结果
4.1 确定各指标权重
为确定10个评价指标对达芬奇手术机器人论证评估的重要程度,邀请专家利用德尔菲法确定各指标权重,经过归一化处理,得到宏观因素、医院现状及预期效益3个维度的10个评价指标的权重,具体权重赋值情况见表4。
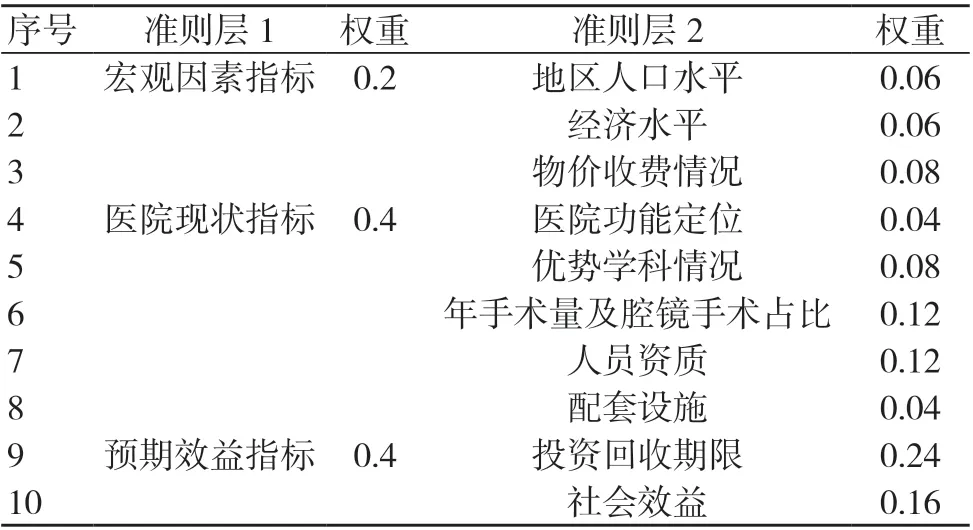
表4 评价指标权重
4.2 评价指标并建立模糊关系矩阵
邀请12名专家依据理论分析、实践经验、同行了解等维度对地区人口水平、经济水平、物价收费情况、医院功能定位、优势学科情况、年手术量及腔镜手术占比、人员资质、配套设施、投资回收期限、社会效益等10个指标进行评价,评价结果选项包括“优秀”“良好”“一般”“较差”及“差”,对12名专家的评价结果进行统计汇总,结果如表5所示。
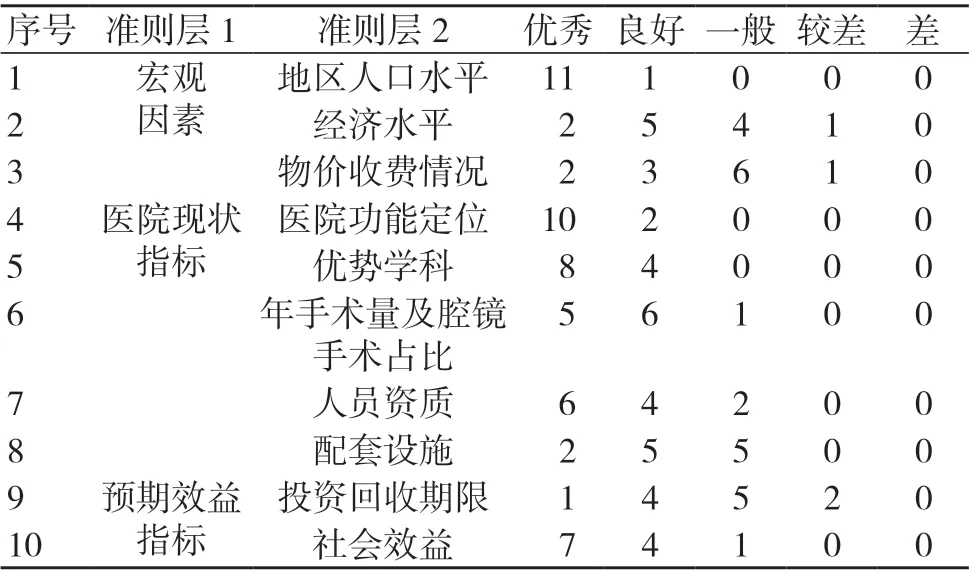
表5 专家对相关指标的评价结果
进行归一化处理后得到评价指标的模糊关系矩阵R:

4.3 模糊综合评价
评估指标的权重因子W与模糊关系矩阵R进行向量计算,得到最终的模糊综合评价结果:
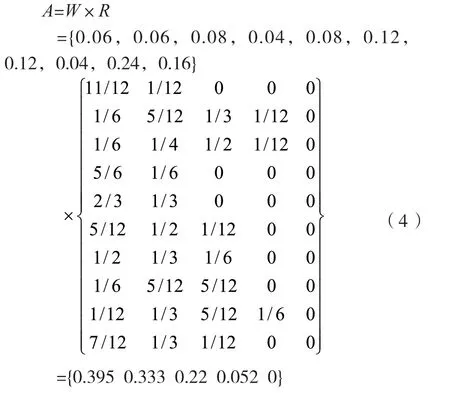
模糊综合评价结果表明,对于整个评价指标中“优秀”的评价所占比例为39.5%,“良好”的评价所占比例为33.3%,“一般”的评价所占比例为22%,“较差”的评价所占比例为5.2%,“优秀”及“良好”所占比例为72.8%,医院可以依据此次评估结果,为达芬奇手术机器人科学配置提供参考依据。
5 小结
随着医学技术的进步,越来越多先进的大型医用设备问世并迅速在临床获得应用。大型医用设备的配置决策受多种因素的影响,且很多因素无法进行量化评估,导致合理配置相应设备面临挑战。本研究以达芬奇手术机器人为例,合理设置评价指标,借助模糊数学的方法,通过权重因子与模糊关系矩阵的向量计算得到定量化评估结果,有效解决了医学装备评估中很多影响因素很难用清晰准确的界限区分、难以定量化的问题,为医疗机构合理配置达芬奇手术机器人提供参考依据。新版《医疗器械监督管理条例》要求进一步推进大型医用设备科学合理配置,当前我国尚没有针对甲、乙类医用设备配置的统一指标及评估体系,如何在分级诊疗制度建设、公立医院改革等背景下,构建方法科学的配置评估体系,支持大型医用设备的合理配置及优化应用,提升有关技术服务的质量、效果及效率,在未来仍然具有较大的科学研究价值和决策支持意义。
猜你喜欢
健康护理(2022年3期)2022-05-26
心理学报(2022年5期)2022-05-16
现代仪器与医疗(2022年1期)2022-04-19
现代仪器与医疗(2021年6期)2022-01-18
现代仪器与医疗(2021年4期)2021-11-05
中老年保健(2021年11期)2021-08-22
当代陕西(2020年17期)2020-10-28
工业设计(2019年6期)2019-07-08
人大建设(2018年5期)2018-08-16
证券市场红周刊(2018年3期)2018-05-14
