基于STM32的空气悬架控制半实物仿真与验证
2022-07-14 00:54马桂芳
农机使用与维修 2022年7期
王 涛,马桂芳
(昆明铁道职业技术学院,昆明 650200)
0 引言
随着汽车工业的发展,人们对乘用车提出了更高要求,悬架系统作为汽车底盘的重要系统,是路面与车身的连接缓冲,对悬架系统做必要的研究能有效提升乘用车的稳定性、舒适性和安全性。鞠锐等[1]对单筒充气型轿车磁流变液减震器进行研究,可有效调节减震器的阻尼力以提升乘坐的舒适性。赵雷雷等[2]对半主动悬架系统的最佳阻尼比控制策略进行研究,优化了半主动悬架的控制策略。主动式空气悬架的刚度、阻尼及高度在一定范围内可调,又因其功耗低、易于实现、操作安全和对道路破坏小等优点,得到了广泛应用。根据交通部实施的JT/T325—2002《营运客车类型划分及等级评定》中的要求,空气悬架已成为高级客车的必选配置。
本文研究空气悬架的高度(AHC)控制,空气悬架控制器一般采用原型化方法进行开发,依据性能要求进行硬件设计和代码编写,但手工编写代码开发周期长,可靠性不足,已很难适应当前产品研发。针对空气悬架高度控制系统采用“V字形”开发流程如图1所示,完成功能需求分析后,依据I/O接口配置要求,进行控制器选型;采用simulink/stateflow搭建空气悬架控制策略,自动生成代码,通过STM32单片机实现对空气悬架气囊充气和放气的控制,有效控制地面与车身之间的高度。搭建1/4汽车悬架试验台,通过dSPACE实时仿真系统,结合CarSim仿真的整车状态,实现空气悬架高度控制的半实物仿真与验证,开发周期短,开发过程简便快捷,可靠性强。

图1 空气悬架高度控制“V字形”开发流程
1 空气悬架系统控制需求分析
汽车在行驶过程中的路面激励是非线性的,在高速行驶时,期望汽车能够有较低的质心,以保证车辆的操控稳定性,减小风阻;在低速行驶时,期望汽车底盘较高,可以让坐姿稍高,以保证较好的舒适性,有良好的视野;在非铺装路面行驶时,期望汽车底盘能够更高,以保证良好的通过性,防止底盘被刮擦。
按以上使用角度分析,空气悬架需要以下功能。手动控制功能:能够用选择开关自主控制悬架高度,即越野模式(高位)、普通模式(中位)、高速模式(低位)。自动控制功能:1)随速功能,在汽车的行车过程中,车身高度能随车速自动控制;2)微调功能,在停车状态若簧上质量发生变化,能恢复原有车身高度;3)维修模式,在举升机举升车辆时,空气压缩机不工作。
2 AHC控制策略模型和硬件在环实验平台搭建
为了克服手工编写代码开发周期长,可靠性不足的缺点,采用模型设计(Model based Design,简称MBD)来替代传统手工代码开发模式,利用simulink/stateflow有限状态机的状态、转移、节点等组件来搭建AHC控制策略模型,如图2所示。该模型主要由手动控制模式和自动控制模式组成,自动控制模式又由车高随速控制、维修模式、车高微调控制等构成。
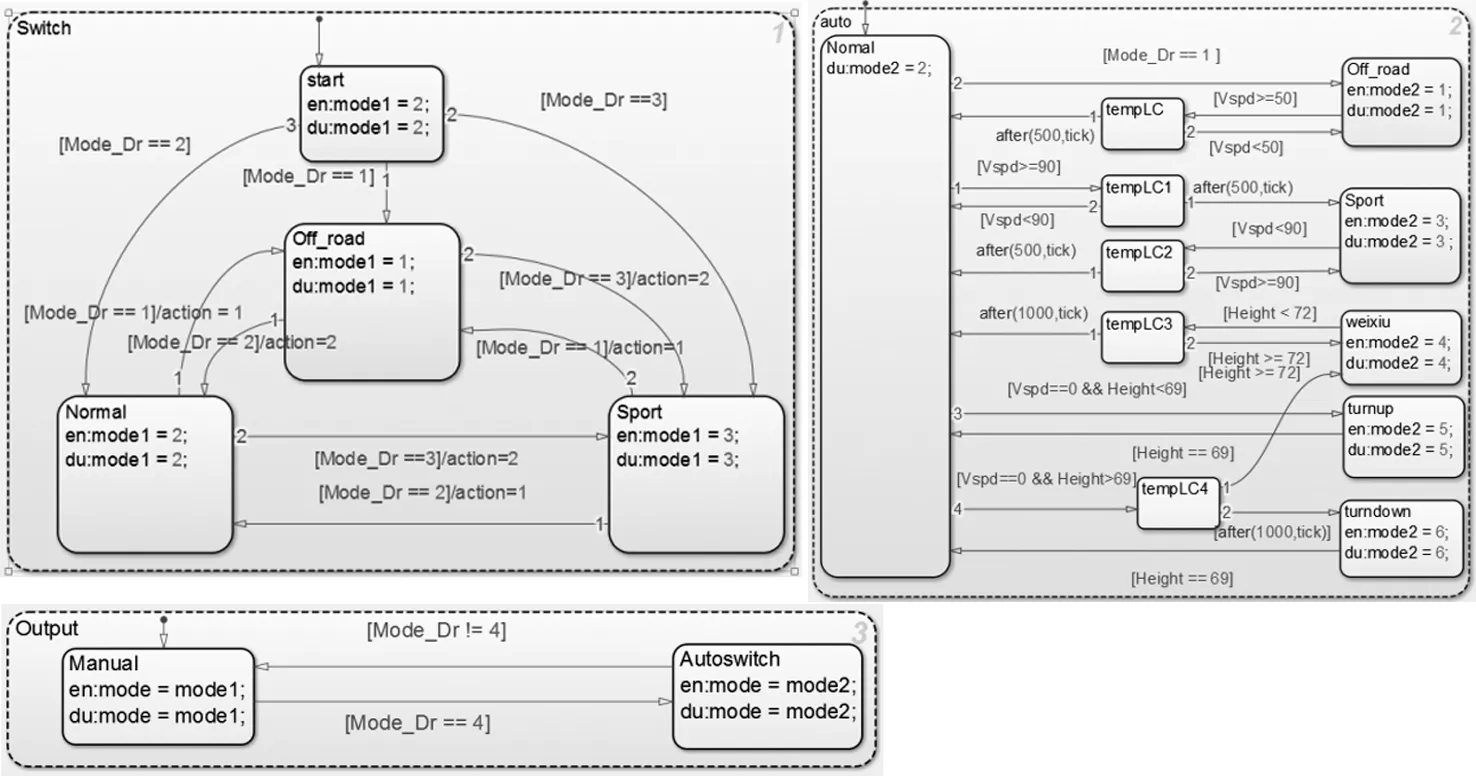
图2 Stateflow搭建的控制策略模型
2.1 AHC手动控制模式
从空气悬架功能需求分析可知AHC控制策略应具有手动控制功能,让驾驶员在汽车停车或低速状态可以手动控制悬架高度,且手动控制模式优先级大于自动控制模式。
2.2 AHC自动控制模式
AHC自动控制模式是根据汽车实际情况适时调整悬架高度。1)随速模式。汽车初始状态为普通模式,当车速vspd≥90 km·h-1且时间超过5 s,进入高速模式,降低悬架高度;当车速vspd<90 km·h-1且时间超过5 s,则进入普通模式,恢复悬架原有高度;当车速vspd<30 km·h-1且位移传感器θ角变化幅度大的次数大于5次,则进入越野模式,升高悬架高度。2)微调模式。在停车状态,悬架承载的簧上质量有变化时会导致悬架高度的变化,当位移传感器θ角变大或变小时,启动微调模式对空气悬架气囊执行充气或放气操作,恢复悬架原有高度。3)维修模式。在停车状态,位移传感器θ角持续变小一直变到最小值时,启动维修模式,切断空气压缩机电源,防止空气压缩机异常工作而引起蓄电池电量不足。
硬件实验台架1/4空气悬架由12 V电源、空气压缩机、分配阀、气管、储气罐、空气悬架、STM32单片机构成,如图3所示。分配阀以气管和空气压缩机、储气罐、气囊相连接,采用STM32单片机控制空气压缩机继电器及各进气阀和泄气阀,以达到AHC控制策略的硬件需求。
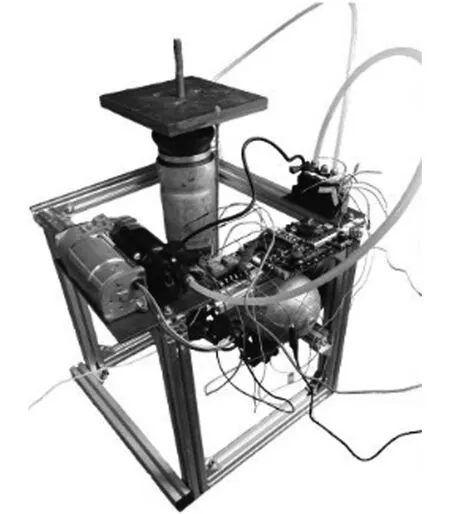
图3 1/4空气悬架试验平台
3 半实物仿真与验证
半实物仿真,即对系统的一部分建立数学模型,进行计算机实时运算,实现数学仿真;将系统中另外某些部分或环节,如部分执行机构以实物的形式引入仿真回路,连接成系统进行试验、调试的过程[4-5]。搭建1/4汽车悬架试验台后,载入单片机程序,通过dSPACE实时仿真系统,结合CarSim仿真的整车状态,实现了空气悬架控制系统的半实物仿真。1/4汽车悬架与整车仿真配合,能够实现预设的空气悬架控制逻辑,实现AHC手动控制模式,控制悬架分别在高位、中位和低位,悬架可控总行程200 mm;能够实现模拟车速下的AHC自动控制,车速Vspd<90 km·h-1时悬架自动控制在中位,Vspd≥90 km·h-1时悬架自动控制在低位。
4 结语
采用模型设计(MBD)来替代传统手工代码开发模式,利用simulink/stateflow有限状态机的状态、转移、节点等组件来搭建AHC控制策略模型,并运用STM32单片机控制 1/4汽车悬架试验平台,结合CarSim仿真的整车状态,最终实现对空气悬架试验平台的高度控制是可行的。
猜你喜欢
装备制造技术(2021年4期)2021-08-05
电子测试(2018年6期)2018-05-09
小学生导刊(2017年17期)2017-05-17
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
铁道通信信号(2016年12期)2016-06-01
城市轨道交通研究(2015年3期)2015-02-27
凿岩机械气动工具(2014年4期)2014-03-01
凿岩机械气动工具(2014年2期)2014-03-01