水下监测与清污机器人的研究与设计
2022-07-12 01:44何佳兵
科技创新与应用 2022年20期
卢 文,何佳兵
(1.云南轻纺职业学院,云南 昆明 650300;2.中山职业技术学院,广东 中山 528458)
公园、学校、小区里各种大大小小的人工鱼池、游泳池、蓄水池和沟渠等均需要进行水质的监测与清污,以保证其能正常使用[1-2]。现有的清污清淤机器多数以岸上大功率抽吸为主,也有浮游式的清污机器和具有水力推进器的行走式水下清污机[3-4]。这些机器存在以下不足:(1)技术落后、能耗高、工效低,通常体积庞大,大多是针对河道、水库的清污使用,多数以岸上大功率抽吸为主;(2)不具有通用性,只能满足某些特定的场合使用;(3)功能单一,通常只能将污垢和淤泥排出或过滤,不具备实时监测和预警等功能;(4)智能化程度不高,操作不方便,机器工作过程中必须有人操作和看护,劳动强度和人工成本均比较高,根本满足不了现代人对设备自动化和智能化的需求;(5)结构复杂,生产、组装和维护非常麻烦,价格昂贵。
针对以上情况,为了克服上述现有技术的不足,本文设计了一种水下监测与清污机器人。该机器人能够有效解决通用性不好、功能单一、智能化程度不高、结构复杂成本高等问题。它能对作业水域的氧浓度、酸碱度、浑浊度污垢沉积情况进行实时监测和观看,并可以根据监测数据给使用者或维护者提前预警。它能让使用者通过手机或互联网随时获取机器人的状态信息、水质信息;并可以根据需要随时远距离或近距离控制机器人工作。它可以根据设定的指令进行快速清污、慢速清污、手动清污、自动清污、定期清污、定点清污、自动避障、自动返回及故障报警等。达到监测与清污多功能、智能化程度高、使用方便和维护简单等目的。
1 整体设计
如图1所示为机器人的整体结构,机器人本体以底盘支架13为中心,底盘支架下面安装有两个防水级别为IP6的步进动力电机12,通过电机固定架11与底盘连接,电机连接两个动力轮10带动整个机器人在水下进行运动,通过前端的万向轮9进行导向,实现机器人在水下作前进和后退的运动;通过调节两边电机旋转的速度和方向,实现机器人的左右转弯及360°旋转。机器人在水下的运动可以根据需要通过同时调节两个动力电机的转速,进行快速运动或慢速运动。
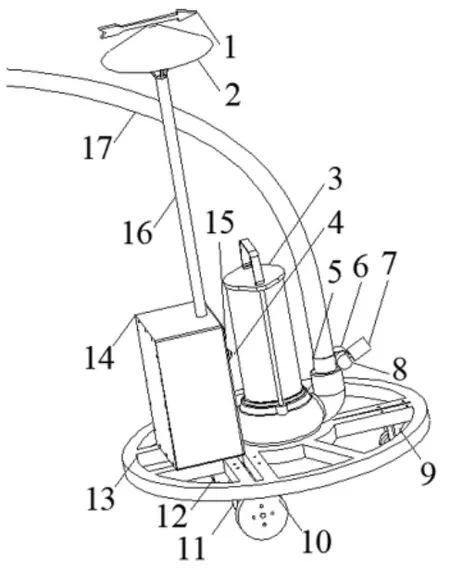
图1 整体设计
底盘支架上面安放有具绞碎功能的大功率潜吸泵3,和控制盒14。潜吸泵的抽吸开启由主控板21控制,它自带水压传感器,必须沉浸到水下才可以进行抽吸工作,工作过程中可以将水下的污垢和垃圾等进行绞碎并通过排水管17排走。如果清污频率比较高,水质相对比较干净,可以把排水管换成一个过滤装置,直接把污浊物收集在过滤装置里。
潜吸泵前端安装一个内置探照灯的防水摄像头7。由固定抱箍5、防水直流电机6和摄像头固定支架8连接与定位。固定抱箍5直接安装在潜吸泵的排水出口处,靠锁紧力抱紧。防水直流电机通过螺丝固定在固定抱箍上,由主控板控制其旋转角度。摄像头固定支架安装与防水直流电机的轴上,用于固定防水摄像头。通过主控板的控制信号,可以让摄像头做俯仰运动,可以随时以视觉的方式观察水中的动植物、污浊情况、清污效果等,也可以为手动清污起到导航作用。俯仰范围为±90°,可随机器人本体360°旋转,摄像头内置用于照明的探照灯。通过上位机控制系统可以随时对所拍摄对象进行图像的截取和视频的录制。
2 控制盒及控制设计
机器人的控制盒设计如图2所示。控制盒用不锈钢密封制作,控制盒侧盖22可以根据需要打开,用于放置内部元件,它通过密封圈或密封胶水与主体连接,通过禁锢螺丝固定,防水级别达到IP6以上。控制盒有一个48 V直流开关电源23用于给动力防水步进电机12做动力;有一个5 V直流开关电源24用于给控制系统供电;它们通过螺丝固定,并且均有一侧面紧贴控制盒侧壁,起到良好的散热效果。控制盒内部有两个驱动器18、19,用于控制两个防水步进电机的转速与方向。控制盒侧面安装有一个氧浓度传感器4和酸碱度传感器15,用于测试工作水域的氧浓度传感器和酸碱度。控制盒顶部开有一圆孔与线路管16连接,用于放置电源线与数据线;底部开有三个小圆孔,三个电机电线均从此通过。
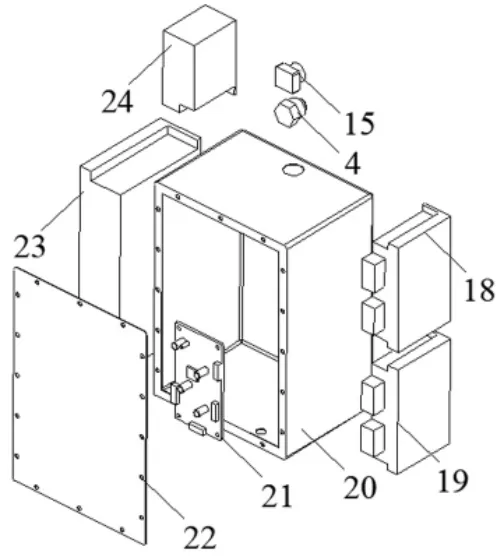
图2 控制盒设计图
控制盒中间放置主控板21,主控板是整个机器人本体的控制中心,它接收各传感器和信号模块的信息,并进行处理和判断,把结果通过wifi传输给上位机控制系统[5];然后等待上位机的指令进行相应的动作。主控板21上面设计有加速度传感器,用于检测机器人本体在运动过程中是否遇到障碍物。
控制上盖设计图如图3所示。线路管位于控制盒上方,为可伸缩防水不锈钢管,一方面用于支撑防水罩组合体,另一方面让电源线及部分信号线从其中间通过。线路管上方为防水罩组合体2,防水罩25与托盘27形成密封体,内部放置有电子指南针模块26、GPS模块28和wifi模块29。其中电子指南针模块用于给机器人本体在水下做直线运动时作导向作用;GPS模块用于给机器人定位,以实现机器人本体的定点清污和工作完后自动返回出发地[6];wifi模块用于实现机器人本体与上位机的无线通讯,利用如图4所示的上位机控制系统,用户可以很方便地通过手机或者互联网获取机器人工作水域的情况和机器人本体的工作状态,可以实时短距离或远距离遥控机器人,并进行数据存储。
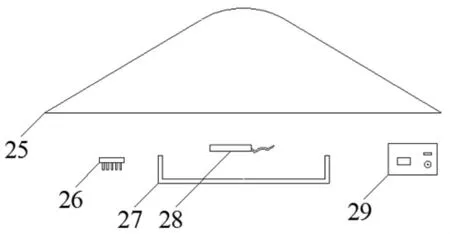
图3 控制上盖设计图
3 上位机控制系统设计
上位机控制系统,用于与机器人本体进行数据的传输与下达控制指令。该系统安装于安卓系统的手机上或者PC电脑上,该系统通过wifi或网络加wifi实现与机器人本体的远程通信、控制和数据存储。使用前先要在手机或PC电脑上安装该操作系统,其界面如图4所示。首先要通过通讯参数设置窗口30设置互联的参数,主要为IP地址和通信端口,设置好后点击物联按钮31进行连接,未连接上时按钮为蓝灰色,连接上后为绿灰色。连接上后系统就会自动显示所获取的数据,在氧浓度显示窗口33和酸碱度显示窗口35分别显示机器人所在水域的氧浓度值和酸碱度值,如果数值超标,显示窗口旁边的指示标志34、36就会闪烁提示;在图像显示窗口42可直接显示摄像头所拍摄的图像,通过滑动该窗口,可以对图像进行局部放大和整体缩小,通过双击该窗口可以设置路径和格式保存当前图像,通过长按住该窗口切换到录像模式并设计保存路径和格式[7]。
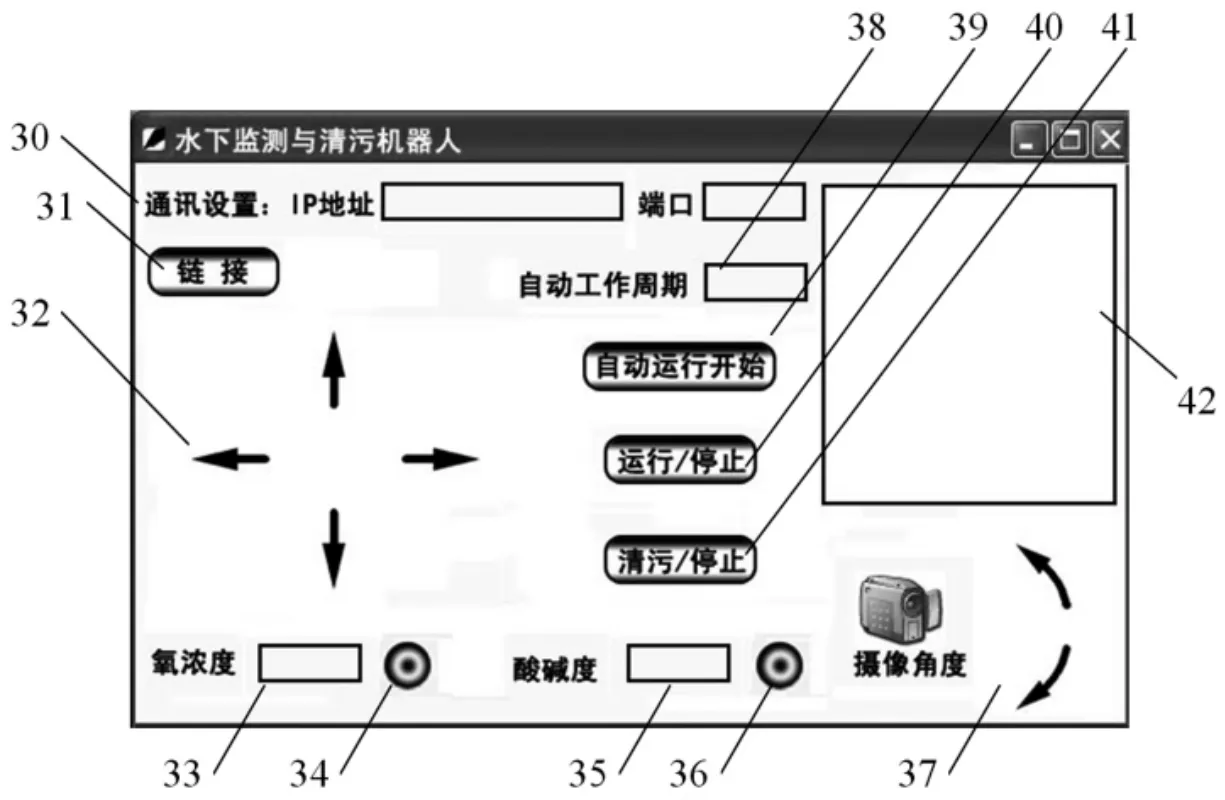
图4 上位机系统控制界面
系统互联后,可以使用手机无线遥控机器人,也可以通过互联网远程遥控机器人。通过机器运动运行/停止按钮40可以控制让机器人运动或停止,通过潜水泵开停按钮41可以控制机器人是否开启潜吸泵吸污排污,通过运动方向控制按钮32可以控制机器人运动的方向,通过长按前进或后退按键可以调节机器人的速度。需要让机器人进行自动清污时,先在自动工作周期设置窗口38设置工作周期,然后点击自动运行开始控制按钮39,机器人就按照设定参数自动周期性清污,不需人工维护。一旦机器人出现故障,系统的图像显示窗口会停止图像的显示,而是显示故障信息,直到故障排除,机器人正常后,该窗口才会重新显示图像。
4 控制盒及控制设计
自动清污行走如图5所示。首先要调节好机器人开始前进的角度,然后当通过上位机系统设计好自动清污周期后,按下自动运行开始控制按钮39,清污机器人便通过GPS模块28记录当前位置的地球坐标,开启潜吸泵,开始自动清污,按照如图5所示的路线进行自动前进和清污。前进过程中,由电子指南针26实时监测机器人的前进方向,并反馈给主控板21调节两个动力轮的转速,保证机器人沿着直线前进。当碰撞到墙壁后,主控板上的加速度传感器马上感知,并立刻停止运动,自动避障,然后根据电子指南针的数据以一定偏角后退,让机器人适当错开到另外一行,继续沿着直线后退。如此循环,直到两次碰壁间隔小于一定值时,主控板自动感知机器人已经到了终点,关闭潜吸泵,并通过GPS数据自动返回到出发点43,完成一次自动清污。清污过程中可以随时通过防水摄像头观察水下的情况。通过设定适当的周期便可以实现定期清污。
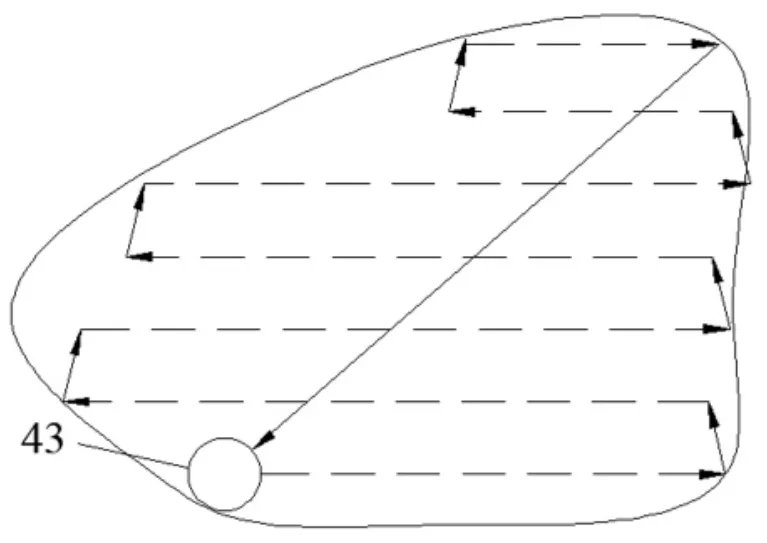
图5 机器人行走轨迹图
清污过程中可以通过长按运动方向控制按钮32的前进或后退方向按钮进行清污速度的调节,长按前进按钮增加速度,长按后退方向按钮减少速度,实现快速清污和慢速清污的调节。
当需要进行手动清污时,直接按机器运动运行/停止按钮40和潜吸泵开停按钮41让机器人前进并进行清污,然后通过运动方向控制按钮任意控制机器人的行进和清污路线。
当需要定点清污时,首先按机器运动运行/停止按钮,让机器人运动起来,再通过运动方向控制按钮控制机器人运动到所要到达的目的地,然后通过潜吸泵开停按钮让机器人进行定点清污。也可以在机器人运动过程中根据需要随时通过潜吸泵开停按钮启动或关闭清污功能。
机器人运动过程中如果出现了故障或检测到了不正常的工作状态,比如堵转卡死、传感器检测数据异常、水量过浅等,系统会自动识别并把故障类型反馈给上位机控制系统,以警告的形式告知用户,并视故障类型决定是否停止当前的一切工作任务。
5 结束语
本文设计解决了现有技术中存在的通用性不好、智能化程度不高、结构简单,成本低的缺陷,可用于公园、学校、小区里各种大大小小的人工鱼池、游泳池、蓄水池和沟渠等。本设计的机器人可对作业水域的氧浓度、酸碱度与浑浊度污垢沉积情况进行实时监测和观看,并可以根据监测数据给使用者或维护者提前预警;能让使用者通过手机或互联网随时获取机器人的状态信息,水质信息,并可以根据需要随时远程或近距离控制机器人工作。机器人可以根据设定的指令进行快速清污、慢速清污、手动清污、自动清污、定期清污、定点清污、自动避障、自动返回、故障报警等。达到监测与清污多功能、智能化程度高、使用方便、维护简单。解决了水下工作困难的问题,具有很好的现实意义。
猜你喜欢
控制与信息技术(2022年3期)2022-07-08
哈哈画报(2021年10期)2021-02-28
物联网技术(2020年2期)2020-04-10
电子制作(2019年13期)2020-01-14
车迷(2018年12期)2018-07-26
制造业自动化(2017年2期)2017-03-20
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
图书与情报(2013年1期)2013-11-16
卷宗(2013年6期)2013-10-21