基于子控制器最优组合的Youla参数化容错控制器设计
2022-07-03 12:56金楠王嵩崔磊杨洪玖
航空科学技术 2022年5期
关键词:飞行器
金楠 王嵩 崔磊 杨洪玖
摘要:针对具有作动器故障的飞行器,本文提出了一种基于子控制器最优组合的Youla参数化容错控制器。该方法根据Youla参数化理论设计标称控制器,设计了一种能够提供作动器的故障信息的故障重构算法,并且构造出可以利用故障信息进行对设计的容错控制器进行在线调整的可重构的子控制器最优组合参数化矩阵。仿真结果表明,所设计的容错控制器可以有效地镇定故障飞行器,保证飞行的安全可靠性。
关键词:作动器故障;飞行器;Youla参数化;容错控制;故障重构
中图分类号:TP273文献标识码:ADOI:10.19452/j.issn1007-5453.2022.05.014
随着航空航天技术的不断发展,人们对航空器、航天器等的可靠性和安全性提出了越来越高的要求[1],这就不断地推动着飞行控制系统控制器设计的发展[2]。为提升飞行器在发生故障的情况下的可靠性及安全性,对飞行器的容错控制问题进行深入研究具有重要的理论与应用意义。
近年来,作为一种能够有效解决航天器执行器故障问题的方式,容错控制策略在国内外成为业界的研究重点。容错控制是一类为确保故障控制系统的可靠性与安全性所设计的特殊控制算法。容错控制根据对故障的处理方式的不同[3],可以分为被动容错控制[2-3]以及主动容错控制[4-8]两大类。由于被动容错控制是考虑被控系统在故障最严重情况下进行分析设计的,虽然可以保证系统在发生故障情况下的可靠性与稳定性,但是系统的性能会变差[3];主动容错控制主要由故障检测诊断部分以及控制重构两部分组成,因而主动容错控制具有更好的控制性能。关于主动容错控制,参考文献[6]将航天器的故障检测与估计单元进行一体化设计,提出了一种在干扰影响下的航天器主动容错控制技术,提高了被控系统的安全性及可靠性。为提升控制系统的容错控制性能,参考文献[7]利用积分滑模的思想控制具有不确定性以及可能发生执行器故障的非线性系统。针对配备不同冗余驱动系统的多电动飞机,参考文献[8]提出了一种新型的主动容错控制方案,该方案将故障控制分配方案与积分滑模控制器相结合,保证了飞行器执行器出现故障时系统的稳定性与安全性。
在很多现有的相关研究中,利用Youla参数化进行容错控制系统的设计是一种行之有效的方式。参考文献[9]首次提出用广义内模控制的结构进行容错控制器的设计,提出了一种新的反馈控制器结构。其中,控制器的性能和鲁棒性设计分开进行,克服传统反馈框架中性能和鲁棒性之间的冲突。参考文献[10]对于动态系统的参数化故障提出了主动故障诊断方法,并且在设计过程中,引入了故障特征矩阵,考虑了与对偶Youla-Jabr-Bongiorno-Kucera(YJBK)传递函数的关系。参考文献[11]利用对偶Youla参数化以及扩展系统的参数化进行动态系统参数故障的主动故障诊断方法的设计。参考文献[12]基于YJBK参数化设计了容错控制器。
本文基于上述工作的研究内容,针对发生执行器故障的飞行器系统,设计了一种基于子控制器最优组合的Youla参数化容错控制器。其中,针对作动器的故障信息,提出了一种新的故障重构算法,并根据获得的故障信息在线调整可重构的故障参数化矩阵,进而调整容错控制器[13]。本文提出的容错控制器具有以下优点:(1)直接根据故障观测器的观测器增益来获得标称控制器;(2)子容错控制器的组合可以处理作动器损伤造成的故障;(3)Youla参数化故障重构容错控制器只需要调整一个子传递函数,简化了容错控制的在线调整策略。
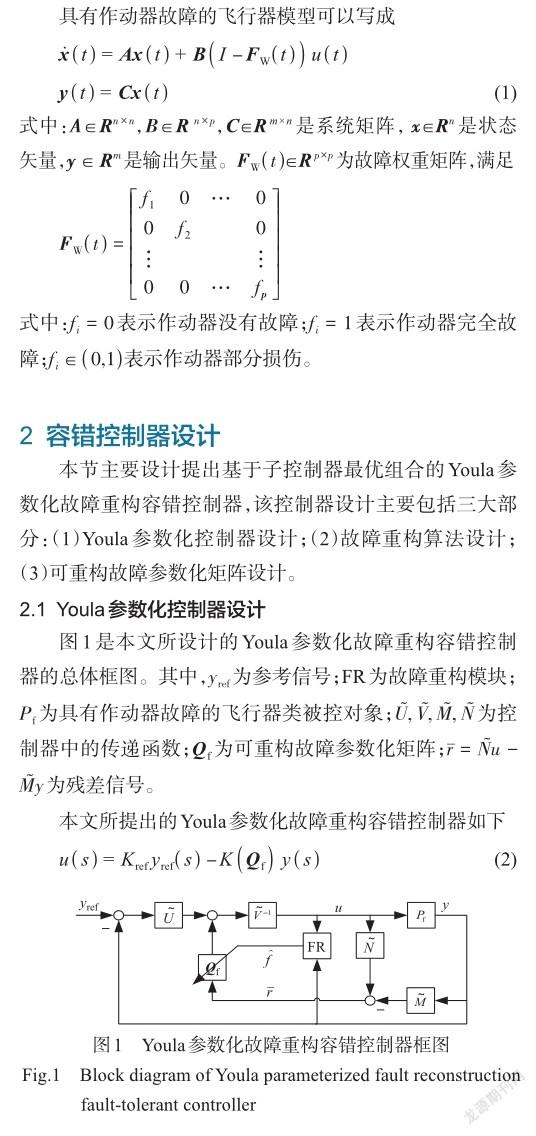
1问题描述


3仿真
本节将子控制器最优组合故障重构容错控制器应用在垂直升降(VTOL)飞行器模型上。
3.1垂直升降飞行器模型
当VTOL飞行器在一定的载荷和风速为135kn的条件下,其动态模型方程可以表示为
3.2仿真结果
在仿真过程中,高斯分布扰动信号d~N(0,0.1)加在垂直升降的线性飞行器模型上。图4显示的是在应用本文提出的Youla参数化容错控制器情况下竖直方向速度跟踪的效果,圖中与之进行对比的是在只应用标称控制器情况下的跟踪曲线。从图中可以明显看出,本文提出的Youla参数化容错控制器具有很好的垂直速度跟踪性能。
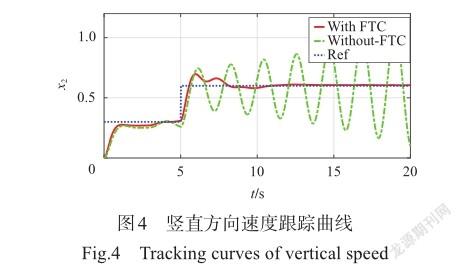
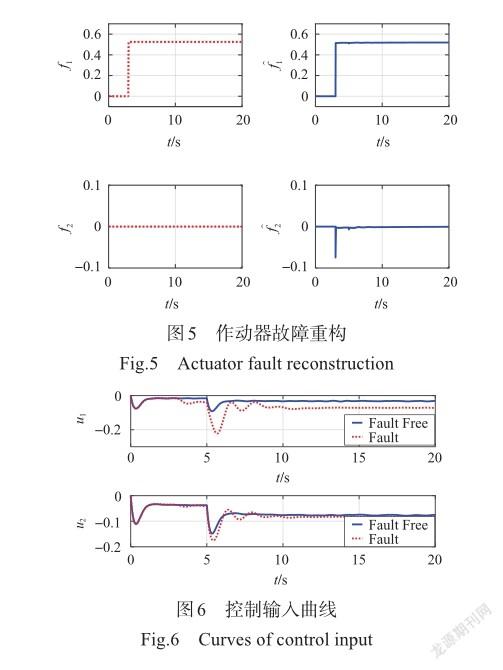
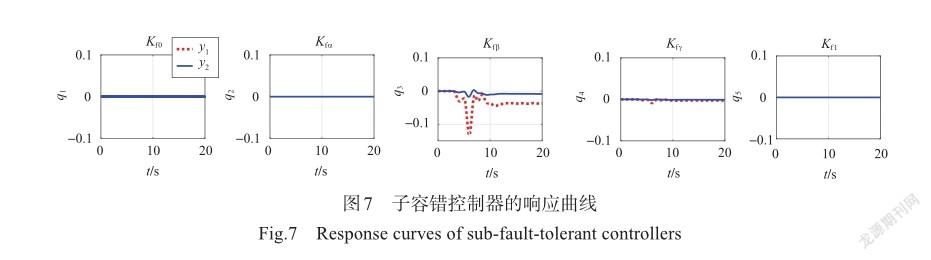
图5描述的是作动器故障重构曲线。在仿真过程中所设置的是在3s时刻,作动器f1= 0.52发生故障,作动器f2保持健康。从仿真曲线可以明显地看出,被重构的作动器故障可以很好地解耦未知输入扰动,因而提出的故障重构方法可以有效地估计发生的作动器故障。图6描述的在有无故障发生的两种情况下,控制输入的变化曲线。在3s时刻,作动器f1发生故障,在本文提出的Youla参数化容错控制器作用下,控制输入u1迅速变化来对这部分故障引起的影响进行补偿。图7描述的是子容错控制器控制量的相应结果。由于仿真过程只有作动器f1发生故障,则子容错控制器Kfβ起作用。相应地,它对应的输出控制量q3增加。仿真曲线符合理论分析,因此很好地验证了可重构故障参数化矩阵的有效性。
4结论
本文针对发生执行器故障的飞行器提出了一种基于子控制器最优组合的Youla参数化故障重构容错控制器。仿真结果表明:(1)在发生作动器故障时,所提出的容错控制器能够保证输出跟踪性能;(2)保证发生执行器故障的垂直升降飞行器的稳定性;(3)所提出的故障重构算法能够快速地对作动器故障进行重构。综上,本文所提出的Youla参数化容错控制器能够有效地镇定发生执行器故障的飞行器,有效地保证飞行器飞行的可靠性。
参考文献
[1]白春玉,刘小川,惠旭龙,等.民机适坠性研究中的垂向坠撞速度问题探讨[J].航空科学技术, 2020, 31(9): 11-17. Bai Chunyu, Liu Xiaochuan, Hui Xulong, et al. Discussion on the problem of vertical crash velocity in the study of the crashworthiness of civil aircraft[J]. Aeronautical Science & Technology, 2020, 31(9): 11-17. (in Chinese)
[2]刘小川,王彬文,白春玉,等.航空结构冲击动力学技术的发展与展望[J].航空科学技术,2020,31(3):1-14. Liu Xiaochuan, Wang Binwen, Bai Chunyu,et al. Progress and prospect of aviation structure impact dynamics[J]. Aeronautical Science & Technology, 2020, 31(3):1-14. (in Chinese)
[3]王伟,李清东.飞行器执行机构故障的鲁棒容错控制器设计[J].火力与指挥控制, 2019,44(2): 129-133. Wang Wei, Li Qingdong. Robust fault-tolerant controller for flight control actuator failures[J]. Fire Control & Command Control, 2019,44(2):129-133. (in Chinese)
[4]Zheng Z,Song S M. Autonomous attitude coordinated control forspacecraftformationwithinputconstraint,model uncertainties,and external disturbances[J]. Chinese Journal of Aeronautics,2014,27(3):602-612.
[5]Bustan D,Pariz N,Sani S K H. Robust fault-tolerant tracking control design for spacecraft under control input saturation[J]. ISATransactions,2014,53:1073-1080.
[6]宗群,杨希成,张秀云,等.一种故障干扰解耦的航天器主动容错控制方法[J].哈尔滨工业大学学报, 2020,52(9):107-115. Zong Qun, Yang Xicheng, Zhang Xiuyun, et al. An active fault tolerantcontrolmethodforspacecraftwithfaultand disturbance decoupling[J]. Journal of Harbin Institute of Technology,2020,52(9):107-115. (in Chinese)
[7]李麗荣,刘春生.基于积分滑模控制的飞行器主动容错控制技术研究[J].电光与控制,2019,26(3):16-20. Li Lirong, Liu Chunsheng. Active fault control of aircraft based on integral sliding mode control[J]. Electronics Optics&Control,2019,26(3):16-20. (in Chinese)
[8]Ijaz S,Yan L,Hamayun M T,et al. Active fault tolerant control scheme for aircraft with dissimilar redundant actuation system subject to hydraulic failure[J]. IEEE Transactions on Automatic Control,2019,356:1302-1332.
[9]Zhou K M. A new controller architecture for high performance,robust,and fault-tolerant control[J]. IEEE Transactions on Automatic Control,2001,46(10):1613-1618.
[10]Niemann H. A setup for active fault diagnosis[J]. IEEE Transactions onAutomatic Control,2006,51(9):1572-1578.
[11]Niemann H. Dual Youla parameterization[J]. IET Control Theory andApplication,2003,150(5):493-497.
[12]Niemann H,Poulsen N K. Fault tolerant control-a residual based setup[C]//Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference,2009,16-18.
[13]Chen J,Patton R J. Robust model based fault diagnosis for dynamics[M]. Boston:KluwerAcademic Publishers,1999.
Youla Parameterized Fault-Tolerant Controller Design Based on Optimal Combination of Sub-Controllers
Jin Nan1,Wang Song2,Cui Lei1,Yang Hongjiu1
1. Tianjin University,Tianjin 300072,China
2. Harbin Engineering University,Harbin 150001,China
Abstract: This paper proposes a Youla parameterized fault-tolerant controller based on the optimal combination of sub-controllers for aircraft with actuator failure. This scheme designs the nominal controller based on Youla’s parameterization theory, proposes a new fault reconstruction algorithm to provide actuator fault information, and presents a reconfigurable sub-controller optimal combination parameterization matrix. The parameterization matrix adjusts the designed fault-tolerant controller. The simulation results show that the designed fault-tolerant controller can effectively stabilize the malfunctioning aircraft, thereby ensuring the safety and reliability of flight.
Key Words: actuator failure; aircraft; Youla parameterization; fault-tolerant control; fault reconstruction
猜你喜欢
小天使·五年级语数英综合(2021年10期)2021-10-19
学苑创造·A版(2020年11期)2020-01-07
发明与创新·中学生(2019年2期)2019-02-26
发明与创新·中学生(2018年12期)2018-12-29
环球时报(2018-11-30)2018-11-30
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
作文周刊·小学三年级版(2017年32期)2017-09-04
小朋友·快乐手工(2015年5期)2015-06-06
第二课堂(初中版)(2009年4期)2009-07-02