地外天体形貌测绘研究现状与展望
2022-06-30 12:11:44徐青,耿迅
深空探测学报 2022年3期
徐 青,耿 迅
(1.信息工程大学 地理空间信息学院,郑州 450052;2.河南大学 地理与环境学院,开封 475004;3.河南大学 河南省时空大数据产业技术研究院,郑州 475000)
引 言
深空探测中的一个重要科学目标是通过航天遥感测绘手段获得高精度、高分辨率的地外天体形貌测绘产品,从而为后续的一系列探测活动提供基础形貌数据保障[1-4]。地外天体的形貌测绘产品主要用于着陆区(或采样区)选址、飞行导航、路径规划等深空探测工程任务以及行星地质构造、形貌特征、演化历史等科学研究[5-7]。与对地观测领域的测绘技术相比,地外天体形貌测绘蕴含着综合、复杂的理论技术体系,涉及天文、导航、航天、测绘、测控等多个学科交叉、相互渗透的理论知识和技术方法[1,8]。
近年来,中国成功实施了“嫦娥”系列月球探测工程与“天问一号”火星探测工程[9-11]。结合深空探测工程任务,中国的地外天体形貌测绘技术也迅速发展,从早期使用国外公开数据的算法验证阶段进入到依靠自主探测数据的行星遥感制图阶段,制作的地外天体形貌测绘产品很好地支撑了月球、火星探测任务的着陆区选址、着陆导航、巡视勘察等工程任务[12-17]。深空探测与行星科学紧密结合,当前中国正在实施从深空探测大国迈向行星科学强国的战略转型[18],而深层次的行星科学研究也需要高精度、高分辨率的地外天体形貌测绘产品作为支撑[19-21]。然而,由于受到制图产品不足、数据处理周期长等因素的制约,许多行星科学研究只能使用早期的低分辨率制图产品或者未经几何处理的原始遥感数据。因此,仍然需要进一步加强地外天体形貌测绘技术的研究与应用。
地外天体形貌测绘包含轨道器遥感制图以及巡视器导航相机、地形相机的就位探测制图,本文重点论述轨道器遥感制图技术及产品。第1~3节分别介绍月球、火星与小行星的形貌测绘成果,第4节针对中国开展地外天体形貌测绘给出了几点建议。本文主要介绍利用测绘相机以及激光高度计获取的遥感数据开展地外天体形貌测绘的相关处理技术及遥感制图产品,不涉及行星地质图绘制。
1 月球形貌测绘
20世纪六、七十年代,美国和前苏联实施了多次月球探测任务,月球形貌测绘技术得到初步应用并迅速发展。1971—1972年实施的“阿波罗15号”(Apollo 15)~“阿波罗17号”(Apollo 17)任务均携带了测量型相机用于绘制月面地形图,并且同步使用激光高度计获取探测器至月面的距离信息辅助摄影测量处理。近年来,美国地质调查局(United States Geological Survey,USGS)等机构重新对Apollo 15~17任务获取的胶片式影像进行数字化处理,并制作了分辨率约为30 m/像素的局部区域数字正射影像图(Digital Orthophoto Map,DOM)与数字高程模型(Digital Elevation Model,DEM)[22]。美国于1994年1月发射了“克莱门汀号”(Clementine)月球探测器,携带了紫外线/可见光相机(Ultraviolet/Visible Camera,UVVIS)、近红外相机(Near Infrared Camera,NIR)等光学仪器以及激光测高仪,利用获取的遥感数据制作了“克莱门汀”月球控制网(the Clementine Lunar Control Network,CLCN),基于43 000张UVVIS影像制作了分辨率为100 m/像素的全月数字正射影像图[23]。2005年月球统一控制网(The Unified Lunar Control Network 2005,ULCN2005)是基于43 866幅克莱门汀影像的摄影测量处理以及早期的月球控制网建立的,共包含272 931个地面控制点;与CLCN相比,ULCN2005通过求解控制点的高程值进一步提升几何精度,其平面精度为100 m~几km,垂直精度为100 m[24]。美国于2009年6月发射了“月球侦察轨道器”(Lunar Reconnaissance Orbiter,LRO),基于LRO宽角相机(Wide Angle Camera,WAC)影像数据制作了分辨率为100 m的近似全月DEM(即GLD100)与全月DOM,GLD100 DEM的覆盖纬度范围为-79°~79°[25]。LRO携带的窄角相机(Narrow Angle Camera,NAC)可以获取分辨率为0.5~2 m的月面影像,经过十多年的持续观测,NAC影像数量已经超过一百万张,能够覆盖月球表面大部分区域[26]。LRO上搭载的激光高度计(Lunar Orbiter Laser Altimeter,LOLA)的测距精度为±10 cm,高程精度为±1 m,基于LOLA数据制作了240 、120、60 m等不同格网间距的全月DEM,LOLA DEM作为目前精度最高的月球高程控制数据,广泛应用于月球遥感制图领域[27]。
21世纪以来,月球探测掀起新高潮,更多的国家或航天机构加入到了月球探测阵营。2007年9月,日本发射了“月女神”(SELenological and ENgineering Explorer,SELENE)月球探测器,搭载了线阵推扫式地形测绘相机(Terrain Camera,TC)、多光谱相机(Multiband Imager,MI)与激光高度计(LAser ALtimeter,LALT),TC相机可以获取空间分辨率为10 m/像素的月面影像,通过融合TC影像与LRO LOLA激光测高数据,制作了分辨率为512像素/(°)(赤道区域分辨率约60 m/像素)的近似全月DEM(即SLDEM2015),覆盖纬度范围为-60°~60°,高程精度为3~4 m,基于MI影像数据制作了近似全月的多光谱影像拼图,分辨率约为59 m,覆盖±65°纬度区域[28-29]。
印度于2008年10月发射了“月船一号”(Chandrayaan-1)探测器,搭载了三线阵地形测绘相机(Terrain Mapping Camera,TMC)与激光测距仪(Lunar Laser Ranging Instrument,LLRI),TMC的影像分辨率为5 m/像素,LLRI的测距精度优于±5 m[30]。文献[31]介绍了利用Chandrayaan-1 TMC立体影像制作DEM(格网间距为25 m)的初步实验结果。文献[32]基于有理函数模型方法对TMC立体影像进行了摄影测量处理,由于未使用高程控制数据,生成的DEM与LOLA DEM之间有1~2 km的系统误差。印度的“月船二号”(Chandrayaan-2)探测器于2019年7月发射,虽然着陆任务失败,但是轨道器仍然在轨运行,搭载的TMC2立体测绘相机的技术指标与TMC类似,另外还搭载了一台轨道器高分辨率相机(Orbiter High Resolution Camera,OHRC)用于局部区域的精细制图,其下视影像的空间分辨率为0.25 m/像素,倾斜25°进行立体摄影时的空间分辨率优于0.32 m/像素[33]。印度虽然也制订了生产月球全球DOM与DEM的计划,但是目前仍未发布相关产品。
中国的月球探测任务起步较晚,却在较短的时间内取得了举世瞩目的成就。“嫦娥一号”(CE-1)探测器于2007年10月发射,文献[14]利用CE-1激光高度计(Laser Altimeter,LAM)获取的约912万个有效探测数据制作了空间分辨率为3 km的全月DEM,平面精度为445 m,高程精度为60 m。文献[12]对CE-1获取的三线阵CCD影像数据进行摄影测量处理,制作了分辨率为120 m/像素的全月DOM以及500 m格网间距的全月DEM,并且绘制了比例尺为1∶250万(等高距500 m)的全月球数字地形图。“嫦娥二号”(CE-2)探测器于2010年10月发射,利用CE-2立体影像数据进行摄影测量处理,并使用5个月面激光反射器的已知位置作为绝对控制点,制作了C E-2全月地形产品(即CE2TMap2015),包括7、20、50 m 3种不同分辨率的DEM与DOM,平面相对位置精度为5 m,高程相对位置精度为2 m,通过与激光反射器的月面位置进行对比,平面绝对位置精度为21~97 m,高程绝对位置精度为2~19 m,CE2TMap2015全月地形产品的空间分辨率、全月覆盖率等指标优于国外同类制图产品[34]。
就月球局部区域遥感制图制图,文献[35]利用765幅LRO NAC影像制作了分辨率为1.5 m/像素的“嫦娥五号”(CE-5)着陆区正射影像拼图,平面相对位置精度优于1个像元。LROC(Lunar Reconnaissance Orbiter Camera)团队使用USGS ISIS行星遥感影像处理软件对10 581张LRO NAC影像进行几何纠正处理,利用格网间距为30 m的LOLA DEM作为参考,制作了北纬60°到北极点的大范围影像拼图,分辨率为2 m/像素[36]。文献[37]利用阴影恢复形状(Shape from Shading,SfS)技术进行月球表面局部区域的高精细制图,可以生成逐像素分辨率的DEM数据。文献[38]融合摄影测量与SfS技术,利用LRO NAC影像制作了“嫦娥四号”(CE-4)、CE-5着陆区的高分辨率DEM产品。
深空探测巡视器上的导航、地形相机也可以用于绘制着陆区或者巡视区域的制图产品,辅助探测任务的路径规划以及行星科学分析。文献[39]分析了CE-3导航相机的测图能力,研发了基于导航相机立体影像的三维地形快速重建算法,并应用于CE-3巡视器的路径规划。文献[40]利用CE-4巡视器导航相机影像数据自动生成了2 cm/像素的DEM与DOM数据,用于巡视区域的障碍物识别以及路径规划。文献[41]综合利用CE-2正射影像、LRO NAC正射影像以及CE-4降落相机、监视相机影像进行特征匹配与视觉测量处理,确定CE-4着陆点位置为(177.588°E,45.457°S)。
虽然月球全球形貌测绘产品的精度与分辨率已经得到不断提升,但是不同探测任务制作的测绘产品由于参考基准、控制数据以及处理方法的差异,存在不同程度的几何误差。基于CE-2、SELENE、Chandrayaan-1/2与LRO NAC、LOLA等遥感数据进行融合处理,理论上能够制作出分辨率为2~5 m/像素的全月DOM以及更高分辨率的全月DEM,将进一步促进月球科学研究,但是涉及数百万张影像的多探测任务数据融合处理仍然是一项极具挑战性的研究课题。文献[42]提出了利用多探测任务数据构建新一代月球全球控制网的总体技术框架。表1列出了典型月球探测任务的遥感制图产品。
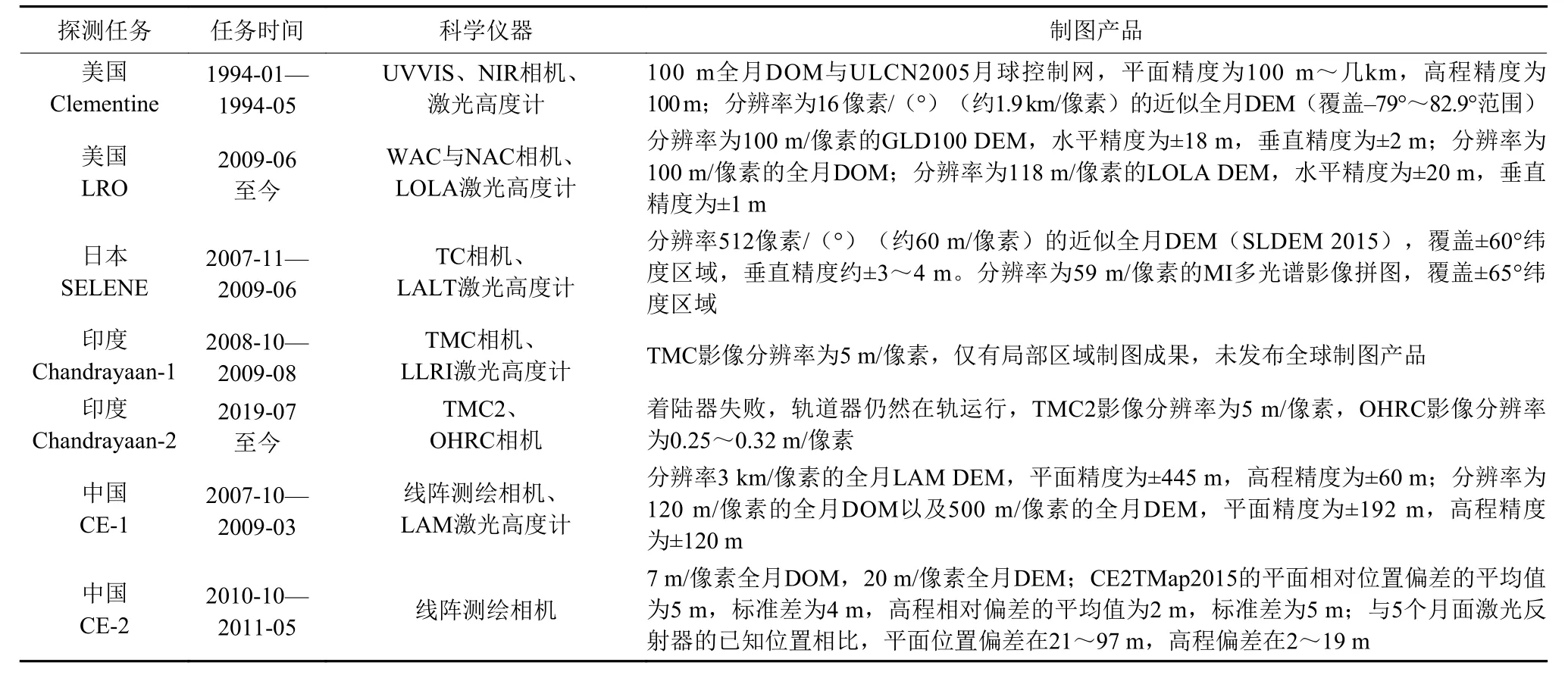
表1 典型月球探测任务遥感制图产品Table 1 Typical lunar exploration projects and lunar mapping products
2 火星形貌测绘
火星形貌测绘技术一直是深空测绘领域的研究重点[2,43]。美国于20世纪70年代成功实施了“海盗1号”(Viking 1)与“海盗2号”(Viking 2)火星探测任务,两个“海盗号”探测器均携带了(Visual Imaging System,VIS)相机,共获取超过6万张影像数据。针对“海盗号”任务的遥感数据处理工作从20世纪70年代末一直持续至20世纪初。USGS制作了1∶500万、1∶200万比例尺火星全球地形图以及1∶200万~1∶5万等多种不同比例尺的局部区域地形图。USGS基于“海盗号”影像制作了分辨率为231 m/像素的火星全球数字影像图(Mars Digital Image Model,MDIM1.0),位置精度约±6 km。20世纪初,USGS又使用数字摄影测量技术对“海盗号”影像进行处理,并于2004年发布了新版本的MDIM 2.1,包括全色与彩色火星全球DOM,分辨率为231 m/像素,位置精度提升至200 m(约1个像素)[44-45]。美国“火星全球勘测者”(Mars Global Surveyor,MGS)探测器于1996年11月发射,搭载了火星轨道器相机(Mars Orbiter Camera,MOC)以及激光高度计(Mars Orbiter Laser Altimeter,MOLA),MOC相机包括宽角相机与窄角相机[3],共获取了超过24万张影像,基于MOLA获取的超过6亿个激光点数据制作了格网间距约为463 m的火星全球DEM(即MOLA DEM),平面精度约±100 m,高程精度约±1 m[46]。MOLA DEM作为目前精度最高的火星高程控制数据,广泛应用于火星遥感制图领域[47]。美国“奥德赛”(Odyssey)火星探测器于2001年4月发射,亚利桑那州立大学(Arizona State University)利用热辐射成像光谱仪(Thermal Emission and Imaging Spectrometer,THEMIS)影像数据制作了红外波段白天的全球DOM以及夜晚的近似全球DOM(覆盖-60°~60°纬度区域),影像分辨率约100 m/像素,平面精度约±100 m(即1个像素)[48]。美国“火星侦察轨道器”(Mars Reconnaissance Orbiter,MRO)于2005年8月发射,搭载了背景相机(Context Camera,CTX)与高分辨率成像科学实验相机(High Resolution Imaging Science Experiment,HiRISE)。CTX影像的分辨率为6~10 m/像素,已经覆盖约82%的火星表面,HiRISE影像的分辨率最高可达25 cm/像素[49],目前仅覆盖约2.4%的火星表面[50]。MRO仍然在轨运行,已传回超过110万张HiRISE影像与10万张CTX影像。基于MRO CTX影像数据制作了5 m/像素的火星全球DOM拼图,但是未进行整体光束法平差[51]。HiRISE相机焦平面结构复杂,由14条线阵CCD拼接而成(10个红色波段、2个蓝绿波段、2个近红外波段),文献[52]建立了HiRISE相机的严密几何模型,并处理生成了“勇气号”(Spirit)探测器巡视区域格网间距为1 m的DEM。文献[4]介绍了HiRISE影像的几何检校、软件开发、处理流程,并生成了“凤凰号”(Phoenix)探测器预选着陆区格网间距为1 m的DEM。
在火星局部区域遥感制图方面,美国地质勘探局(United States Geological Survey,USGS)、美国国家航空航天局(National Aeronautics and Space Administration,NASA)等机构基于MGS MOC、MRO CTX、MRO HiRISE影像数据制作了大量的预选着陆区DOM与DEM产品,用于着陆区选址以及安全性评估[53-55]。文献[56]基于MRO CTX影像制作了39个区域的正射影像拼图,分辨率为5 m/像素,用于未来载人火星探测任务的着陆区选址。文献[7]利用MRO CTX影像与MRO HiRISE影像制作了Mars 2020预选着陆区〔“耶泽罗”撞击坑(Jezero crater)〕的高分辨率DEM与DOM产品,用于支持着陆系统的地形相对导航技术(Terrain Relative Navigation,TRN),辅助探测器着陆过程中的避障操作。
欧洲的“火星快车号”(Mars EXpress,MEX)探测器搭载了高分辨率立体相机(High Resolution Stereo Camera,HRSC),HRSC是多线阵推扫式测绘相机,在一个焦平面上安置了5条全色线阵、4条多光谱线阵(红、绿、蓝与近红外)探测器[57],下视影像分辨率最高可达12.5 m/像素,目前分辨率优于50 m/像素的影像数据已经覆盖约97%的火星表面[58],但是仅有约30%的HRSC影像处理至Level 4级DEM、DOM产品。早期的MEX HRSC制图产品仅进行了单个条带的平差处理,因此不同条带之间存在较大的几何位置误差,HRSC团队虽然有计划制作火星全球DOM(12.5 m/像素)与DEM(50 m/像素),但是目前仅完成了MC-11的东半部区域[59]。USGS融合MEX HRSC立体影像与MGS MOLA激光测高数据制作了格网间距为200 m的火星全球DEM,也是目前分辨率最高的火星全球DEM[60]。欧洲的ExoMars 2016 TGO探测器于2016年3月发射,搭载的彩色与立体表面成像系统(Colour and Stereo Surface Imaging System,CaSSIS)采用面阵推扫式(push-frame)工作模式,通过旋转镜头实现立体观测,交会角为22.4°,立体影像摄影时间差为46.9 s,文献[61]建立了CaSSIS影像的摄影测量处理流程,并研发了相应的软件模块。
印度“曼加里安号”(Mangalyaan)火星探测器于2013年11月发射,携带了火星彩色相机(Mars Color Camera,MCC)与热红外成像光谱仪(Thermal Infrared Imaging Spectrometer,TIS),MCC影像的分辨率为15 m~4 km[62]。文献[63]介绍了基于MCC影像制作火星表面影像拼图的过程,包括辐射处理、几何处理、SPICE计算(用于计算摄影几何条件)、地形改正等步骤,通过将MCC影像自动配准至MDIM2.1影像图获取控制信息。
阿联酋的“希望号”(Hope)火星探测器于2020年7月发射,携带有多波段相机(Emirates eXploration Imager,EXI)、近红外光谱仪(Emirates Mars InfaRed Spectrometer,EMIRS)以及紫外线光谱仪(Emirates Mars Ultraviolet Spectrometer,EMUS),该任务主要是对火星大气、气候等开展研究,目前仍未见到相关制图产品发布。
中国“天问一号”火星探测器一次任务实现了“绕、着、巡”探测,任务的科学目标之一是研究火星形貌与地质构造特征,探测器搭载了中分辨率相机与高分辨率相机,中分辨率相机在400 km轨道高度时的影像分辨率优于100 m[11],计划基于中分辨率相机影像数据制作分辨率为60 m/像素的火星全球DOM。文献[64]介绍了“天问一号”火星多光谱相机的地面几何标定工作,先使用张正友标定算法提供相机标定参数初值,然后用改进的Heikkilä算法完成精确几何标定。文献[10]利用现有火星地形、影像数据与地质单元图,综合工程条件约束与科学价值,选择了中国火星探测任务的8个优先着陆区。中国科学院月球与深空探测重点实验室利用“天问一号”轨道器的高分辨率相机影像数据制作了备选着陆区0.7 m/像素的DOM以及3.5 m/像素的DEM;在此基础上中国科学院空天信息创新研究院行星制图与遥感实验室以及北京航天飞行控制中心等团队综合利用“天问一号”轨道器影像、着陆器下降序列影像以及火星车巡视器影像对祝融号火星车着陆点进行了精确定位,坐标为(109.925°E,25.066°N)[65]。文献[66]利用500余张MEX HRSC条带影像进行摄影测量处理,结合HRSC多线阵影像特点设计了连接点控制网自动提取与粗差剔除方案,基于DOM影像匹配自动分析初始几何定位精度,并采用二阶多项式模型修正外方位元素误差,制作了分辨率为12.5 m/像素的“天问一号”预选着陆区正射影像拼图,相对几何定位精度优于1个像素(见图1)。

图1 中国“天问一号”火星探测任务预选着陆区正射影像拼图[66]Fig.1 The orthophoto mosaics for candidate landing regions of Chinese Tianwen-1[66]
当前火星全球DOM、DEM产品的分辨率仍然在百米级,还不能很好地满足火星科学研究的实际需要,融合多个探测任务遥感数据制作火星全球遥感制图产品的需求更为迫切。基于MEX HRSC、MRO CTX以及中国“天问一号”遥感数据有望制作出分辨率为5~50 m/像素的火星全球DOM以及20~100 m/像素的火星全球DEM。由于火星距离地球更远且缺少高精度的绝对控制数据,火星遥感制图与月球遥感制图相比难度更大。在未获取火星自主探测任务数据之前,国内研究人员利用国外公开的火星探测任务数据开展预先研究,在通用相机模型构建、影像几何纠正、连接点自动提取、光束法平差等摄影测量处理核心技术方面积累经验[67-70]。表2列出了典型火星探测任务的遥感制图产品。
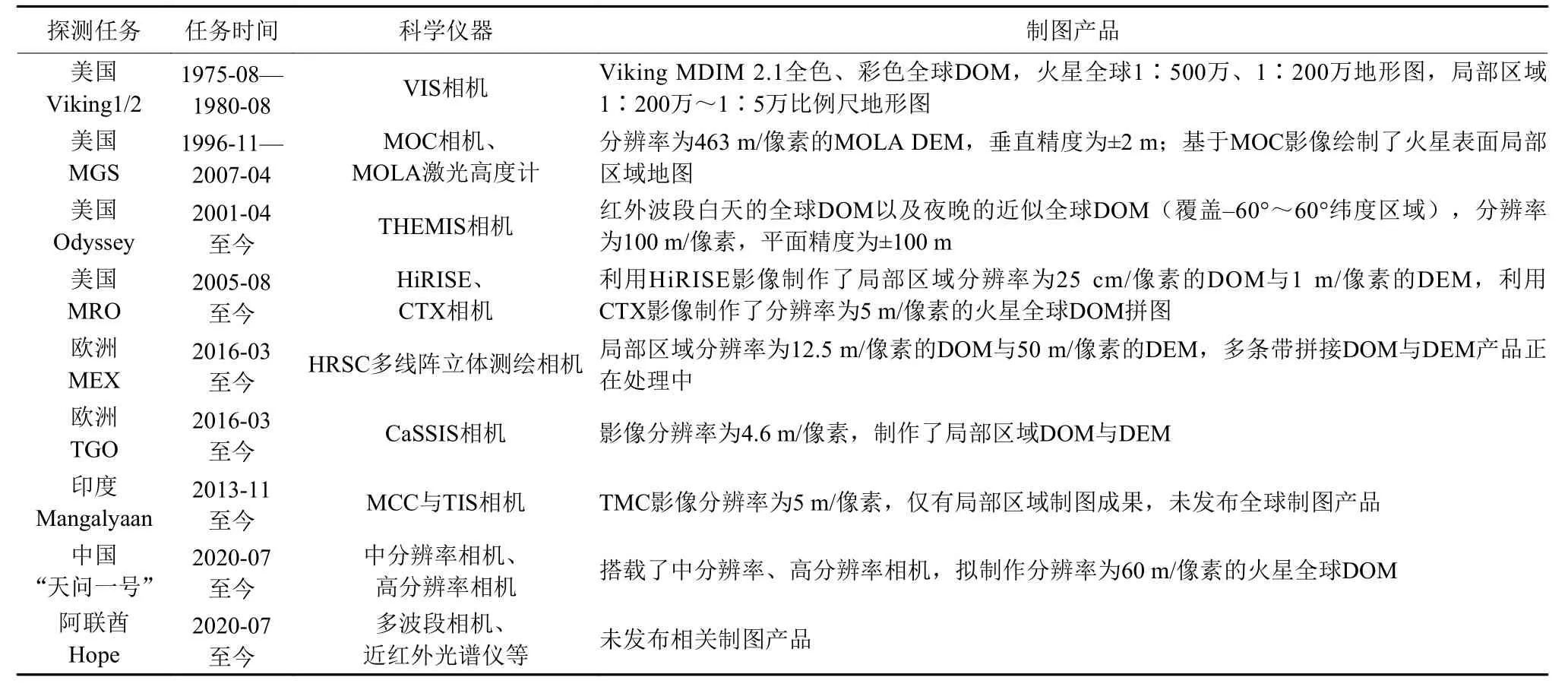
表2 典型火星探测任务遥感制图产品Table 2 Typical Mars exploration projects and Mars mapping products
3 小行星形貌测绘
小行星较好地保存了太阳系早期形成和演化历史的痕迹,是当前国际深空探测领域的研究热点[71]。获取小行星表面高精度的遥感制图产品与三维模型对于评估采样区的安全性与科学价值以及飞行导航等工程操作都具有重要意义。近年来,以美国“奥西里斯号”(OSIRIS-REx)、日本“隼鸟2号”(Hayabusa 2)为代表的小行星采样返回任务均十分重视小行星的遥感制图工作[72-73],小行星遥感制图产品也为工程任务的顺利实施提供了重要支撑。中国小行星探测工程已经选定目标,即通过一次探测任务实现近地小行星2016HO3的取样返回以及主带彗星133P的绕飞探测。
美国首个小行星探测器“近地小行星交会”(Near Earth Asteroid Rendezvous-shoemaker,NEAR)于1996年2月发射,目标是探测近地小行星爱神星(433 Eros),任务携带了多光谱相机(MultiSpectral Imager,MSI)与与激光测高仪(NEAR Laser Rangefinder,NLR)。2000年2月NEAR探测器飞抵Eros,经过约1年的遥感观测共获取了超过16万张影像,分辨率为1~19 m,基于MSI影像处理生成了分辨率为10 m的全球DOM以及分辨率为1 m的局部区域DOM[74]。文献[75]使用立体光度法重建了Eros的三维形状模型,并生成了地标图用于探测器高精度导航。
欧洲航天局(European Space Agency,ESA)的“罗塞塔号”(Rosetta)探测器于2004年03月发射,目标是探测67P彗星,包括“罗塞塔”探测器与“菲莱”(Philae)着陆器,探测器上携带有OSIRIS相机,可以获取0.2~20 m/像素的影像。2014年11月,“菲莱”着陆器成功登陆67P彗星。67P彗星大小为4.1 km×3.3 km×1.8 km,且形状极不规则,基于OSIRIS窄视场相机获取的影像数据制作了67P彗星的三维形状模型,用于辅助着陆区选址与着陆导航[76]。
美国“黎明号”(Dawn)探测器于2007年9月发射,任务探测目标是灶神星(Vesta)与谷神星(Ceres)。针对Vesta与Ceres的绕飞探测均采用了高轨测图轨道(High Altitude Mapping Orbit,HAMO)与低轨测图轨道(Low Altitude Mapping Orbit,LAMO)两种方案。利用“黎明号”获取的遥感影像数据制作了Vesta与Ceres的全球遥感制图产品,即60 m/像素的Vesta全球DOM与93 m/像素的Vesta全球DEM以及140 m/像素的Ceres全球DOM与137 m/像素的Ceres全球DEM[77-80]。
日本“隼鸟2号”探测器于2014年12月发射,携带有ONC光学导航相机、激光雷达等多个遥感观测设备。2018年6月,“隼鸟2号”抵达龙宫(Ryugu)小行星,共获取约1 500张遥感影像,基于立体摄影测量处理方法对龙宫小行星表面进行三维重建并制作遥感制图产品,用于采样区选择以及安全性评估[73]。
“奥西里斯号”探测器于2016年9月发射,是美国第一个小行星采样返回任务,探测器于2018年12月开始绕贝努(Bennu)小行星飞行,并近距离拍摄照片。贝努小行星直径约500 m,是对地球构成威胁的近地小天体。“奥西里斯号”任务团队利用1年多的时间获取遥感影像,并制作了全球及采样区的高分辨率遥感制图产品[72](见图2)。
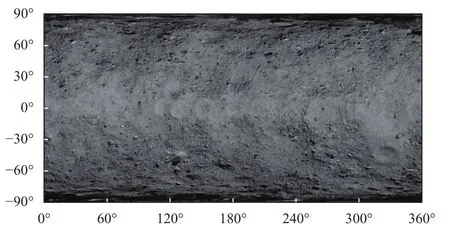
图2 贝努小行星全球正射影像拼图Fig.2 The global digital orthophoto mosaics of Bennu
中国的小行星探测工程正在计划实施中。与月球、火星等较大的天体相比,小行星的形貌测绘具有更大的技术难度,主要难点包含不规则小行星的摄影任务规划与全球制图、小行星精细三维地形获取、小行星自转参数的精确测定等内容。现阶段可以充分利用国外已有小行星探测任务获取的遥感数据开展试验验证,突破关键技术难点。
4 未来技术发展分析
1)加快地外天体形貌测绘技术相关标准、规范的建立与应用推广。当前,由于国内外不同深空探测任务所采用的坐标基准、处理方法、制图方式等不同,导致深空测绘制图产品在实际应用时出现坐标系统不兼容、几何配准误差大等问题,不便于综合应用多探测任务数据开展科学分析。许多行星科学研究人员以及深空探测工程技术人员并不精通测绘领域的地图投影、坐标系统等专业内容。因此有必要在地外天体形貌测绘的数据格式、相机模型、处理方法、坐标系统、制图方法等多个方面建立相关标准规范,并在行星科学以及深空探测工程领域进行推广应用。
2)探索开放与共享深空探测任务原始影像数据与相关辅助数据的方法。目前,基于“嫦娥一号”“嫦娥二号”探测任务数据制作的月球影像图以及DEM等制图产品已经及时向公众发布,基于“天问一号”火星探测任务数据的遥感制图工作正在开展。当前,中国月球、火星探测任务的原始数据仅向地面应用系统以及科学家团队开放。随着中国深空探测任务的开展以及深层次行星科学研究的更大需求,将会有更多的行星遥感数据需要处理,建议进一步开放深空探测任务原始数据,从而更广泛地利用现有对地观测领域的专业技术人员、处理经验与软硬件设施等,也可以更好地向全世界推广中国的深空探测任务数据成果,进一步彰显中国在深空探测领域的技术实力。
3)围绕地外天体形貌测绘的关键技术瓶颈开展攻关,获取更高分辨率、更高精度的深空测绘制图产品。相关技术难点包括多探测任务遥感数据融合处理方法、全球制图大规模连接点控制网的自动化建立、大规模光束法平差的高效稳健计算方法、融合激光测高与影像数据的联合平差方法、不规则小天体的遥感制图方法等。
4)借鉴美国在深空探测任务数据处理中形成的PDS+SPICE+ISIS的经验,建立中国自主开放的地外天体遥感数据处理技术体系。由于PDS行星遥感影像格式在国内外深空探测任务中已经有较好的应用基础,中国深空探测任务的影像数据也采用了PDS格式。SPICE库使得美国深空探测任务辅助数据的存储与处理更加标准化、规范化、系统化,也方便科学研究人员应用。构建深空探测任务辅助数据系统(包括文件格式以及处理函数库)也是中国深空探测领域的一项重要的基础性工作。另外,随着中国深空探测任务数量逐渐增多,为了提升深空探测任务数据处理系统的复用性,中国也很有必要构建类似USGS ISIS的行星遥感数据处理系统,从而更好地支撑深空探测任务数据处理与科学应用。
5)充分利用对地观测领域的遥感影像处理软件、成熟的工程技术经验以及专业技术人员,并结合行星遥感影像的特点有针对性地研发行星摄影测量软件系统。当前,由于缺少坐标基准、不支持行星数据格式、无法转换辅助数据等原因,许多对地观测领域中的商业、开源遥感影像处理软件还无法直接应用于深空探测任务的数据处理。但是行星摄影测量处理的基本理论与对地观测领域是相同的,因此可以结合行星遥感影像的特点,将对地观测领域的软件系统进行改造、扩展以便应用于行星遥感影像处理。而且对地观测领域的专业技术人员在遥感数据处理中积累的丰富的工程实践经验也可以应用于深空探测任务。例如USGS普遍采用SOCET SET商业摄影测量软件处理行星遥感数据。因此,有必要针对行星遥感影像处理开发相应的软件接口,在相机模型方面可以采用通用相机模型或者将卫星影像的严密几何模型转换为有理函数模型,从而便于使用更多的对地观测领域的遥感影像处理软件。
6)进一步加强深空探测与行星科学的学科体系建设,结合深空探测重大工程任务的实施,带动相关学科的发展。行星遥感制图产品是开展行星科学研究的基础地理信息数据,建议有条件的高校开设地外天体形貌测绘的研究方向或者专业课程,有利于让从事深空探测工程任务与行星科学研究的技术人员具备遥感数据处理与制图产品应用的专业知识,从而在开展工程论证、方案设计以及行星地质、地貌分析等工作中更好地应用深空测绘的制图产品。
5 结 论
本文介绍了月球、火星、小行星探测任务中有代表性的形貌测绘技术及遥感制图产品。中国在月球、火星探测方面取得了很大成功,已经公开发布了月球遥感制图产品。利用“天问一号”火星探测任务数据进行火星全球制图、预先开展小行星遥感制图技术难点攻关是中国当前地外天体形貌测绘的研究重点。结合工程任务的实施,中国在地外天体遥感数据处理方面已经积累了一定的经验,未来也需要进一步做好任务原始数据(含辅助数据)的共享开放以及可复用的遥感数据处理系统构建等基础性工作,让深空探测任务获取的遥感数据更好地支撑工程任务与行星科学研究。
猜你喜欢
军事文摘(2022年12期)2022-07-13 03:11:44
飞碟探索(2022年1期)2022-03-12 14:11:20
军事文摘(2021年18期)2021-12-02 01:28:54
海外文摘(2021年7期)2021-08-31 21:33:44
大科技·百科新说(2020年10期)2020-03-01 05:25:19
数学物理学报(2019年3期)2019-07-23 01:15:40
家庭影院技术(2018年9期)2018-11-02 05:31:32
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
少儿科学周刊·儿童版(2015年3期)2015-06-17 04:01:41