星座多目标成像自主任务规划技术研究
2022-06-29 05:05杨立峰郭海波陶震宇
无线电工程 2022年7期
杨立峰,陈 祥,郭海波,马 晨,陶震宇
(1.上海卫星工程研究所,上海 201109;2.中国人民解放军32035部队,陕西 西安 710000)
0 引言
传统基于地面的卫星应用方式由于无法全球部署地面站、抗毁性差和信息链路冗长等缺点,已无法适应新需求[1]。未来天基系统必须具备星上目标实时预处理并可结合卫星姿态和轨道,自主遵循任务实施的各项约束条件,合理调配星座内资源,从而完成多区域、多目标的自主观测任务。
在卫星自主任务规划研究领域,国内外学者进行了一系列的研究。Bonnet[2]研究了仅在地球两极上空进行通信的三星任务规划问题。Van der Horst[3]采用基于市场机制的多Agent法,有效进行了天基资源对多目标的任务分配。Araguz等[4]将整体规划分解为若干局部规划问题并集成于同一框架内进行寻优。何永明等[5]设计了一种面向新型成像卫星的自主任务规划系统,并论证了该系统框架的可行性与优化效率。罗棕等[6]将多星观测任务规划问题的求解过程分解为任务可调度性预测、任务分配和优化调整,有效减少启发式算法的搜索计算量,在较短的时间内获取收益较高的可行解。目前公开文献在进行任务规划研究中考虑的因素均较为理想,并且考虑的系统基础能力需求全面性存在不足。
本文对天基多目标实时成像自主任务规划进行系统性分析,提出完成自主规划的星座需要具备的基础能力,并设计了一种多星协同自主任务规划系统架构,针对该架构中的核心模块——多星协同任务规划模块进行方案设计,最终通过半物理仿真验证了本文提出的多星协同自主任务规划方法的有效性。
1 多目标成像自主任务规划基础能力需求
为保证多目标观测任务实时、有效,并充分、合理利用星座内各节点卫星资源,多区域、同时段内多目标成像自主任务规划实现的前提是天基探测网络必须具备以下6项基本能力。
1.1 单星快速星上目标检测能力
为保证目标观测任务提供给地面系统的信息时效性,保证满足用户需求,星座内单星必须具备星上快速实时目标检测能力,按任务对象不同,需在海面、沙漠、草原、城市和宇宙冷空间等不同下垫面背景下实现对所需目标的准确提取和分辨,为后续任务规划奠定先决基础[7]。
1.2 星上目标实时预处理能力
在单星星上成功检测出目标后,需立即对目标进行星上预处理,快速获得目标的基本信息,且在星上完成目标的自主定位,初步确定目标在特定坐标系下(如相机坐标系等)的视线信息[8],为后续任务规划提供输入条件。
1.3 目标自主唯一编号能力
对于多区域、多目标成像观测任务,由于目标众多,且目标可能出现于多颗星探测范围内,为避免对目标重复编目和探测,必须对目标进行唯一性编号,从而避免影响后续星座内资源配置的合理性和正确性,导致浪费有限的天基资源,重复规划对相同目标的探测时序,导致无法完成对多目标的探测任务规划[9]。
1.4 自主、智能目标优先级确定能力
在目标数量超出星座的任务数量上限时,对目标的观测必须有所取舍,这需要卫星星座内具备对目标的准确可靠的优先级评估能力[10],在多区域、多目标并举时,可按照事先确定的任务优先级进行星上自主优先级匹配,先完成对高优先级目标的探测,在星座内资源调度情况允许时,扩展时序对低优先级目标进行空闲时段探测,资源不允许时将舍弃部分低优先级目标。
1.5 星座内任意节点实时通信能力
多区域、多目标同时探测的天基自主规划任务是一个系统性任务,要求星座内各节点均需获得当前所有区域内的目标情况,以及星座内其余所有节点星的探测任务情况,以便进行系统级的任务规划,避免出现同一时间不同目标同时调度一颗星导致的资源冲突问题。
1.6 星间自主目标交接能力
在多区域、多目标任务规划中,不可避免地会出现同一个目标跨越2颗星视场的工况;此外,由于卫星自身高速运动,其可视范围同样处于变化状态导致单星无法实现对目标全探测周期的观测,这就要求卫星间具备自主目标交接能力,从而实现对目标过程的完整探测[11]。
2 多星协同自主任务规划系统架构
多星协同自主任务规划系统架构如图1所示。
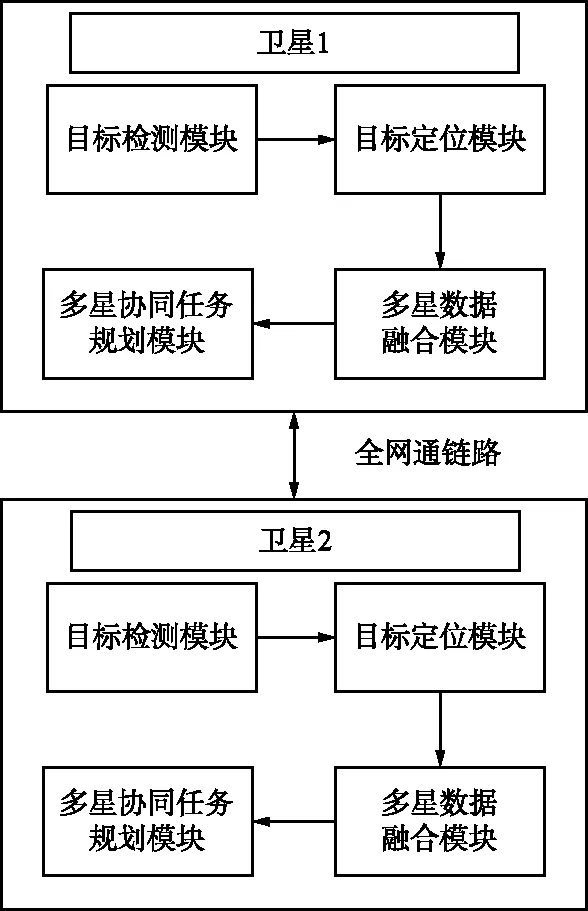
图1 多星协同任务规划系统架构Fig.1 Architecture of multi-satellite cooperative task planning
在图1中,多星协同任务规划模块是核心模块,承担星上任务信息流的接收、处理、生成和分发等任务,并将最终生成的任务指令进行全网发布和执行。
系统工作流程如下:
① 单星探测目标,并进行星上快速检测,同时进行预处理生成视线信息、目标属性信息等。
② 通过星间全网通实时链路将目标信息广播至星座内其余节点星。
③ 节点星接收星座内广播的目标信息后,根据自身轨道、姿态和载荷可用性(是否处于阳光规避期)等信息,自主判断其对目标的可探测关系,判定自身节点可用后,激活多星融合模块对目标进行多星信息融合处理,获得目标的立体定位的位置和速度信息,同时进行目标运动状态预估[12]。
④ 节点星根据目标属性信息、目标位置和速度信息对目标进行编号和优先级确定,并保证所有节点星判定的目标信息一致,否则将导致任务规划出现紊乱,任务失败。
⑤ 多星任务规划模块根据所有目标的属性、运动信息、优先级以及外推的轨迹信息,进行任务规划,制定每颗星的工作计划,各节点星的目标规划信息需保持一致,否则将引起资源调度冲突导致任务失败。
作为核心模块的多星协同任务规划模块,其核心功能如图2所示。

图2 多星协同任务规划模块核心功能Fig.2 Core function of multi-satellite cooperative task planning
3 多星协同任务规划模块方案
3.1 多星协同任务规划模块需求分析
当观测资源有限时,解决多目标问题有3种技术途径[13-14]:① 观测资源分配,解决多星任务分配问题,确保每颗星的观测资源得到充分均衡利用;② 观测资源复用,在多星任务分配的基础上,解决单星对多目标轮询观测的问题,获取有限观测条件下尽可能多的目标轨迹和特性信息;③ 高优先级目标选取,在观测资源有限的情况下,通过对轨迹和特性信息的识别,放弃部分低优先级目标,从而保证对高优先级目标的跟踪识别。
由于任务的实时性要求,星上完成目标初始分配后,多星目标交接、多目标轮询和优先队列排序都在星上完成,依赖于较强的星上自主任务规划能力。其中,多星任务分配的技术瓶颈在于星上任务解算能力和星间数据传输的实时性[15],卫星需掌握全星座的实时状态和任务执行情况,并根据多目标实时位置进行动态任务分配和任务交接。
多目标轮询的技术瓶颈在于目标快速稳定探测及快速融合收敛能力,需具备在轨迹收敛基础上对多目标运动轨迹进行短时速度拟合外推的能力[16],以确保轮询回归后重新捕获目标。
优先队列排序的技术瓶颈在于多源数据融合的目标特性识别能力,包括目标运动轨迹特性和辐射特性,以快速评估目标优先度,需要目标特性数据库及相关识别算法支持[17]。
3.2 多星协同任务规划输入要素
① 目标信息表
目标信息表为其余节点星输入/本星自主发现的目标信息,记录了目标的编号、目标位置、目标速度和目标优先级等目标信息,是任务规划的主要外部输入。目标信息表可与任务指令同时或非同时输入卫星任务规划及管控模块进行存储,当存在任务指令时,触发任务规划执行。
② 卫星星历表
卫星星历数据采用轨道六根数的形式进行保存及传输。星座中每颗组网卫星的星历数据由星上GNSS自主解算或者地面上注,并在空闲时间通过实时星间链路向全网广播。星上存储器可存储所有组网卫星的星历数据,供任务管理器随时调用。根据星历数据和轨道递推模型,对每颗组网卫星进行轨道预报,获取卫星任意时刻位置和速度信息[18]。
③ 卫星健康表
根据星座每日下传遥测数据,地面判断卫星的健康状态,识别平台和载荷的工作能力是否受损,确保卫星节点的有效性。地面定期向全网通报发生故障的卫星节点,在任务规划中进行剔除。
④ 卫星能源表
众所周知,科学研究不能没有抽象。上述经典作家对时代划分的四种思路,就是尺度不同的四种抽象。而只要细心比较就会发现,与前三种划分思路相比,“五形态”说是最合理最适度的抽象。
卫星具备自主能源状态监控能力,当星上剩余能源低于设定阈值时更新,星上发出能源危机报告,任务规划模块向全网广播当前能源危机状态,此时卫星能源状态为不可用;当能源补充完毕时,广播发布当前能源正常状态,能源状态转为可用。
⑤ 任务占用表
任务占用表包含2个部分:第一部分是当前星座中所有需跟踪的目标观测任务编号;第二部分记录了星座中每颗卫星对各个目标的当前跟踪观测执行情况。
每颗卫星获取任务调度指令并开始执行任务后,由任务规划模块根据执行任务内容代号生成任务执行情况状态参数,并通过广播链路实时向星座发布,各星接收并更新自身任务占用表。
3.3 多星协同任务规划方案
在单目标时,首先将包含立体定位信息的引导指令发送给星座内所有节点,引导所有可视卫星对目标进行探测,由对目标可见的双/多星进行立体探测并融合定位在结束跟踪前进行目标交接分配,由引导星将目标外推信息发送给被引导星,被引导星收到引导信息后进行目标捕获跟踪,星上交接完成后继续实施立体跟踪探测。如此往复,直至任务结束。自主任务规划需要考虑星座覆盖、链路拓扑、载荷配置、星上处理以及星务管理等方面的约束。
在多目标时,星座收到立体定位引导信息后,首先对目标优先度进行评估和排序,然后引导分配目标可视星进行探测。在观测资源不足时,星座在目标分配的同时,实施多目标轮询规划,由融合收敛的卫星轮流对重要目标分时跟踪探测。在立体探测双星结束跟踪前,同样需要实施星上交接规划,由引导星将目标外推信息发送给被引导星,被引导星收到引导信息后进行目标捕获跟踪,星上交接完成后继续实施立体跟踪探测,如此往复直至结束。
4 多星协同任务规划验证方案
地面采用半物理仿真对星上多星协同任务规划方案进行验证。半物理仿真验证系统包括自主任务规划管控单元、自主任务规划管控监视终端和多星多目标场景加载单元、场景实时显示终端等。
利用实时内核驱动的工控机模拟星座中某一颗卫星,上位机模拟星座中的其他星,场景设计及三维场景显示也在上位机中模拟,上位机和工控机间通过网络通信进行信息交互,工控机根据收到的引导信息、本星任务执行情况或轮询请求执行目标分配、交接规划或轮询规划,并将结果通过网络反馈给上位机,二者的功能界面分割如图3所示。其内部信息交互流程如图4所示。
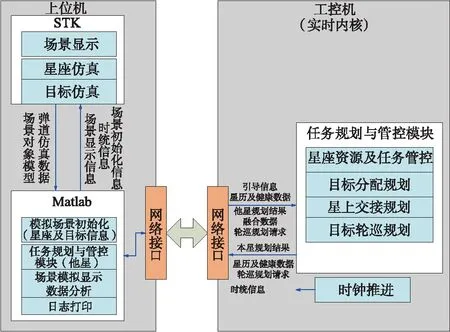
图3 半物理仿真系统功能界面Fig.3 Functional interface of semi-physical simulation

图4 半物理仿真系统交互流程Fig.4 Interaction flow of semi-physical simulation
5 半物理仿真结果
以天基空间目标监视为案例进行仿真,考虑5个空间碎片目标,目标飞行高度568 km,5个目标分布于5个圆轨道面,相邻升交点赤经相差20°,相邻目标相位差30°。
星座为代号28/4/1的Walker星座,轨道高度为1 600 km,倾角为55°。卫星装载大视场捕获可见相机和高分辨率可见相机,通过大视场捕获相机进行亮点捕获发现目标,调度用高分辨相机进行高分成像,后进行多星目标立体定位。
经计算,28星星座可自主完成对5个目标的跟踪,并满足双星跟踪条件,规划过程如图5所示。

图5 空间多目标自主任务规划过程截图Fig.5 Screenshot of space multi-objective autonomous task planning process
经分析,任务规划算法流程中主要耗时计算环节为目标和卫星的轨道预报递推计算时间。采用SM750芯片(主频@266 MHz)进行动力学递推计算(采用无奇点根数轨道预报递推模型[19]),单次计算耗时平均为86 μs,星上协同任务管理及发布时效性优于0.5 s。
6 结束语
本文提出完成自主规划的星座需要具备的基础能力,并设计了一种多星协同自主任务规划系统架构,半物理仿真结果表明系统框架和任务规划模块正确有效。
在仿真过程中发现,计算量主要集中于目标定位、轨迹递推以及卫星姿轨计算环节,在工程应用时需要进一步结合星上硬件条件,进行算法优化,使规划尽可能接近实时;此外,星间链路信息传输速率也会影响规划执行的实时性,在星座链路方案设计时需重点关注信息传输时效性。
本文提出的任务规划方案在每颗星均进行计算,一定程度上将占用星上资源,后续改进方向可考虑基于目标可视星作为星群,星群之一为动态主星方案,可进一步节省星上资源。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
新班主任(2022年4期)2022-04-27
汽车观察(2019年2期)2019-03-15
军事文摘(2018年24期)2018-12-26
民生周刊(2017年19期)2017-10-25
中国化妆品(2017年12期)2017-06-27
健康女性(2017年3期)2017-04-27
儿童故事画报(2016年5期)2017-02-07
都市丽人(2016年12期)2016-12-14
都市丽人(2016年7期)2016-08-03