
张家峁煤矿智能快速掘进工艺优化及应用研究
2022-06-28 05:11:08王学强
煤炭工程 2022年6期
王学强,李 军
(1.陕西煤业股份有限公司,陕西 西安 710077;2.陕煤集团神木张家峁矿业有限公司,陕西 神木 719316)
采煤和掘进是煤矿井工开采的两大主要工序。随着煤炭开采强度与规模日益增大,年消耗回采巷道数量大幅度增加[1-3]。神南矿区张家峁煤矿全矿井的巷道掘进长度达3万余米,为了满足矿井通风、运输以及大型设备的安装及运转,采掘巷道逐渐向大断面、深部化发展,客观上增大了巷道矿压显现程度,制约着巷道掘进速度[4]。由此引发出采掘比例失调,综掘落后与综采进度的问题,已经成为制约煤矿高效安全智能化发展的技术瓶颈[5,6]。此外,后配套系统效率较低、设备未实现成套、主要设备的智能化程度还不高[7-9]。
我国很多学者对巷道快速掘进理论和装备展开了大量研究,白伟[10]分析了岩巷掘进的主要影响因素,优化了爆破参数和支护参数,研制了一套适用于该地质条件下的岩巷快速掘进机械化作业装备。董庆[11]研究了特厚煤层中大断面回采巷道的支护技术,使用了MB670掘锚一体机代替悬臂式掘进机进行掘进。贾明[12]通过对掘锚一体机种类进行分析,明确悬臂式掘锚一体机在复杂地质条件下的优势,并对悬臂式掘锚一体机的适应性改进措施进行阐述。赵改革[13]以先进掘锚一体化快速掘进设备为核心,通过对巷道快速掘进关键技术研究,科学设计适合复杂地质条件的快速掘进掘锚一体化系统长度。卓军[14]通过现场调研、理论分析等方法系统揭示弱黏结复合顶板巷道掘进工作面围岩破坏机理,研发了掘进工作面快速掘进强力掩护装备。掘锚一体机是集掘进、支护为一体,高度集成化的巷道快速掘进设备,有创造良好工作条件、更高安全性、降低职工劳动强度等优势,能满足矿井合理的生产布局、稳定的采掘接续[15,16],确保工程速度和质量。提高煤巷掘进效率,是实现矿井高产高效根本途径之一,也是巷道掘进技术的发展方向[17-20]。基于张家峁煤矿的掘进工作面的设备及工艺优化经验,建立了一套智能快速掘进系统。采用具有感知能力、记忆能力、学习能力和决策能力的掘锚机、锚杆机、破碎转载机、带式输送机等煤巷智能化掘进装备,以自动化控制系统为枢纽,以远程可视监控为手段,实现掘进工作面巷道掘进系统“全断面快速掘进、掘支运平行作业”的智能、安全、协调高效的掘进技术。智能快速掘进技术创造了掘进、支护、运输“三位一体”的快速掘进新类型,实现了设备的集中协同控制,为张家峁煤矿掘进工作面无人化奠定基础。
1 掘进工作面概况及快速掘进设备构成
1.1 掘进工作面概况
张家峁煤矿15212工作面快速掘进系统是张家峁矿业公司“智慧煤矿系统关键技术装备研发与示范矿井建设”项目的重要组成部分。15212工作面开采的5-2煤赋存稳定,埋藏深度为89~229m。煤层向西北倾斜,煤层倾角为0.9°左右,煤层的两极厚度为5.8~6.35m,平均厚度为6.03m。回撤通道附近煤层结构复杂,其它区域煤层结构简单。回撤通道附近煤层含一层夹矸,岩性为泥岩,厚0.1m,夹矸底界面距离煤层底板0.7m。
15212工作面两巷掘进断面5.6m×4.3m。15212辅运巷顶、帮均为锚网联合支护,顶部锚杆间排距为1600mm×1000mm,每排4根锚杆;帮部为锚网支护,锚杆间排距1500mm×1000mm,每排4根锚杆,每帮2根锚杆。15212运输巷及排矸联络巷顶板为锚网联合支护,帮部为锚杆支护,顶板锚杆间排距为1600mm×1000mm,每排4根锚杆。非开采帮锚杆间排距1500mm×1000mm,开采帮锚杆间排距1000mm×1000mm,每排4根锚杆,每帮2根锚杆。
1.2 掘进工作面主要设备
15212工作面快速掘进系统于2020年4月份正式投入使用,截止现在,该套快速掘进系统已顺利完成约10000m的进尺任务,目前正在施工5-2煤南部辅运巷。该套快掘系统采用了“掘锚一体机+锚杆转载机+桥式转载机(两部)+变频调速带式输送机(2×200kW电机)”快速掘进方案。掘锚一体机可实现掘锚平行作业(可同时支护4根顶锚)确保最大空顶距不超过3m,帮锚支护采用锚杆转载机支护,桥式转载机有效行程100m,避免了生产过程中延伸带式输送机工序,保证了成套装备的连续工作时间,设计单日掘进进尺能力100m,单月快速掘进进尺的最大能力3100m/月。快掘工作面的主要设备及技术参数如下。
1)MB670-1掘锚一体机。MB670-1是当前掘锚一体机的最新机型,锚杆机是掘锚机的重要组成部分,整合了同步截割和支护技术,掘锚机配装四台顶板锚杆机和两台侧帮锚杆机。所有顶板锚杆机和侧帮锚杆机都布置在靠近截割滚筒后面,使得掘锚机能够同时进行掘进和锚护作业。
2)锚杆转载机组。锚运一体机与桥式转载输送机一起组成掘锚机的后配套系统,形成快速掘进成套装备,实现了连掘连运、掘锚平行。MZHB5-1000/30P锚杆转载机组,该机设有5m3料斗,转运系统可独立前移一个步距,设置3台顶锚杆锚索钻机,2台帮锚杆钻机适应不同巷道高度的支护作业,顶锚杆钻机与帮锚杆钻机间距2400mm,可以微调。
3)桥式转载机。转载系统桥式转载机与锚运破一体机刚性连接,配套煤矿用锚杆转载机组使用,形成快速掘进系统,完成原煤转运。桥式转载机满足最大输送能力1000t/h以上,一部桥式转载机由45kW变频同步电滚筒驱动,二部桥式转载机由45kW电滚筒驱动,过渡带式输送机机头部与刚性机尾搭接、尾部与桥式转载机头部搭接,后部由3架过渡架与2×200kW电机驱动的工作面巷道带式输送机相连接,过渡带式输送机机尾部设置牵引绞车,绞车固定绳端设置在锚运破尾部。刚性机尾设置牵引绞车,绞车固定绳端设置在过渡带式输送机机滑靴架处。桥式转载机有效拉伸长度100m,可满足最大3100m/月的进尺要求。
2 张家峁煤矿快速掘进设备优化历程
2.1 第一阶段:学习探索阶段
1)配套原则:该阶段快掘系统采用了“掘锚一体机+锚杆转载机+桥式转载机+伸缩型带式输送机+变频调速带式输送机(2×200kW电机)”快速掘进方案。
2)设计理念。桥式转载机、伸缩型带式输送机与锚运破配套,可伸缩有效长度60m,桥式转载机有效长度15m,保证转载及运输的连续性,减少可伸缩带式输送机接入机身标准段的次数,满足最大900m/月的进尺要求。
3)工艺存在的问题。①配套桥式转载机30m,有效行程9~15m,在生产过程中存在每班延伸机尾的工序,增加了生产辅助时间,对掘进单进水平影响巨大,同时增加了生产班班组人员的安全风险,不能发挥快掘设备工艺的优越性;②锚杆转载机与桥式带式输送机搭接处离地太近,无法正常生产;③桥式带式输送机转载机设计长度不够,与后部伸缩机尾相对滑移距离过短,达不到快速掘进设计的要求,降低了掘进速度;④桥式带式输送机和伸缩机尾未设计电缆拖拽功能,生产期间需派专人拉电缆;⑤桥式带式输送机机身弧度太平缓整体离地近,无法满足有起伏的巷道使用;⑥桥式带式输送机和伸缩机尾整体机架太薄、机架强度不够,无法满足正常生产需要,伸缩胶带机尾轨道架滑靴太薄,试拉过程中有部分变形;⑦伸缩胶带机尾张紧绞车设计不合理,张拉过程中绞车和滚筒销轴连接处折叠、起跳,张拉过程不稳定;⑧伸缩机尾底部两端滑动轮不一致,一端间距大,收缩过程中出现咬架现象和阻塞现象,需要人工矫正,无法实现自动拉架;⑨工作面材料架摆放至行人侧(距工作面300m范围内),平均每4天需人工搬迁一次,材料点搬迁频繁,无形中加大了作业人员的劳动强度和标准化实施的难度。
2.2 第二阶段:设备升级阶段
为解决第一阶段暴露出来的问题,提升快掘系统的单进水平,充分考虑现场实际情况及设备参数性能,对第一阶段的快掘系统进行升级改造,制作加工了一套桥式转载机、轨道架及电缆拖拽装置,并将材料场集成在运输机机尾处,具体如下:
1)配套原则。该阶段快掘系统采用了“掘锚一体机+锚杆转载机+桥式转载机+变频调速带式输送机(2×200kW电机)”快速掘进方案。
2)设计理念。桥式转载机满足最大输送能力1000t/h以上,由45kW变频同步电滚筒驱动,该设备前端与锚运破一体机铰接,后部由3架过渡架与2×200kW电机驱动的工作面巷道带式输送机相连接。桥式转载机设计输送长度63m,有效延伸长度50m。
桥式转载机行人侧安设电缆拖拽装置,将掘锚机及锚运破电缆、水管、信号线等封闭在拖缆夹内,同时在掘进机带式输送机机尾跑道架上加工拖缆槽进行固定,末端固定在电缆框附近,另一端连接在桥式转载机处,采用桥式转载机拖动拖缆夹在拖缆槽内来回折叠移动。
3)存在问题。由于桥式转载机有效行程为50m,在掘进过程中,每掘进50m,即需前移桥式转载机,而生产班平均单班进尺不低于45m,在生产期间需增加移桥式转载机及运输机中部胶带架的工序,影响生产班的有效生产时间,无法保障生产班的开机率,限制了快掘系统的有效能力及潜在生产能力。
2.3 第三阶段:优化应用阶段
为解决第二阶段暴露出来的问题,进一步挖掘快掘系统的潜在能力,提高单进水平,创新性提出两部桥式转载机联合使用的技术方案,具体如下:
1)配套原则。该阶段快掘系统采用了“掘锚一体机+锚杆转载机+桥式转载机(共两部)+变频调速带式输送机(2×200kW电机)”快速掘进方案。
2)设计理念。为了高效保障桥式转载机的开机率,在原有系统中进行了升级,新型的转载系统包括45kW变频同步电滚筒驱动桥和45kW电滚筒驱动桥式两部转载机。其中,过渡带式输送机的头部与刚性机尾搭接、尾部与桥式转载机头部搭接,后部由3架过渡架与2×200kW电机驱动的工作面巷道带式输送机相连接;过渡带式输送机的尾部设置牵引绞车,绞车固定绳端设置在锚运破尾部。刚性机尾设置牵引绞车,绞车固定绳端设置在过渡带式输送机滑靴架处。
新型的桥式转载机有效拉伸长度100m,最大可满足3100m/月进尺要求。
3)配套设备优点。掘进生产中,桥式转载机每掘进100m,需在检修期间增加一次胶带配件,生产期间无需增加胶带件,优化了生产工序,增加了掘进时间,提升了单进水平。系统主要包括桥式转载机、过渡带式输送机、刚性机尾三部分。满足最大输送能力1000t/h以上,桥式转载机及过渡带式输送机各采用45kW永磁同步电滚筒驱动,主要技术参数见表1。

表1 长距离转载系统主要技术参数
4)DSJ100/100/2×200带式输送机。15212运输道开口处安设型号为DSJ100 /100/2×200带式输送机1部,参数见表2。

表2 DSJ100/100/2×200型带式输送机主要技术参数
3 掘进工作面智能化监控系统的建立
3.1 现场已实现的功能
掘进工作面智能化监控系统以提高掘进工作面安全性、降低工人劳动强度、提高掘进施工效率和施工质量为出发点,利用智能传感技术、定位定向技术、监测监控技术、机器视觉技术、无线传输技术、远程控制技术和多信息远程重现技术实现可人工干预的远程操作掘锚一体机。主要解决掘锚一体机整机工况参数监测、工作面视频远程监控、掘锚一体机关键部位位置自主检测、人员安全预警、机身自主定位导航、远程可视化控制等技术问题,从而将掘进工作面环境、设备和人员有机和谐地统一起来,最终将人从恶劣危险的工作环境中解放出来,实现“安全、高效、绿色”高质量掘进。根据计划安排,智能化检测系统分阶段进行实施。
目前主要实施项目为:掘进作业可视化系统;掘进设备、多机协同监控整体;安全生产系统,具体项目可达预期效果如下:
1)掘进作业可视化系统。建立了一套高精度1∶1比例的掘进作业线模型场景,地面安设可视化检测系统,真实还原了掘进巷道的内部场景。所有的井下监控数据都接入这套系统,在系统中实现掘进作业流程、监控数据的实时动态可视化展示功能。
2)掘进设备、多机协同监控方面。研发了一套组合导航系统和多机协同监控系统。组合导航系统由激光发射器、激光接收标靶、倾角传感器、控制器组成,通过发射激光,采集传感器的数据,可以确定掘锚一体机在巷道内的相对位置。多机协同控制主要在掘锚一体机、锚杆转载机组、桥式转载机、过渡带式输送机、带式输送机上布置相对位置监测传感器,实时监测多机间的相对位置关系,为多机联动提供依据信号。导航系统与协同系统数据,最终接入智能化监控系统,进行可视化监控。
3)安全生产方面。集成人员定位、安全监测监控、动力监控、视频监控等多个系统。利用传感技术,接入掘进工作面人员定位、安全监测、压风、电力、供/排水系统数据,接入视频监控系统,实时监测掘进工作面作业过程。
3.2 已完成的系统
1)掘进工作面远程监控操作台。掘进工作面安装远程监控操作台,内设集控主机、数据服务器、显示计算机、交换机等设备,分别对掘锚一体机、锚杆转载机组、桥式转载机、带式输送机、供电系统、语音通讯系统等设备进行远程管控。实现掘进工作面部分设备远程控制,监测数据查询、记录,数据上传等功能。
2)掘进工作面网络系统。掘进工作面网络系统由矿用隔爆兼本安型交换机、矿用隔爆兼本安型电源箱、矿用本安型信号转换器、矿用本安型无线基站(WIFI)、多芯铠装连接器、矿用光缆、5G基站等组成,形成掘进工作面千兆工业以太网及5G传输网络,实现数据的高速实时传输。实现与机载无线通讯基站的可靠连接和数据高效传输,掘进面所有监测、控制及视频数据利用5G网络传输至数据中心,快速接入千兆工业控制环网和工业视频环网进行数据上传,远程监控操作台至地面数据中心。
3)掘进工作面视频监视系统。掘锚一体机(3台,两台照向迎头方向、一台照向掘锚一体机运输机卸料点)、锚杆转载机组(1台,照向锚杆转载机运输机卸料点)、桥式转载机(1台,照向桥式转载机卸料点)、掘进工作面远程监控操作台(1台)、带式输送机机头(2台)、胶带输送卸载点(1台)等关键区域配置9台摄像仪。掘锚一体机、锚杆转载机组和桥式转载机处摄像仪采用无线传输方式,带式输送机机头、远程监控台摄像仪采用有线传输方式,将掘锚一体机在工作面的位置状态及现场画面传送到后方掘进工作面远程监控操作台,使得操作人员能够对设备进行监控和操作,确保移动设备运动时无拖曳通讯电缆以及音视频和数据的可靠、稳定、实时传输。
4)掘锚一体机组合导航系统。组合导航系统由激光发射器、激光接收标靶、倾角传感器、控制器组成。激光发射器安装在固定位置,激光接收标靶和控制器安装在设备上,激光发射器工作时发射激光束,激光标靶接收到激光束后,控制系统根据激光在标靶上的位置信息和倾角传感器输送信息,计算出设备的姿态参数,实现设备的定向导航。组合导航系统构成图,如图1所示。

图1 组合导航系统
掘锚一体机组合导航系统具有三维姿态实时检测功能,系统精度能够自修正,检测误差不需人工标定。掘锚一体机导航偏差±6cm/50m,具有掘锚一体机行走跑偏预警功能,实现掘锚一体机机身相对于巷道轴线的水平偏移量、高度差和在巷道轴线方向上的前进距离以及机身相对于巷道的横滚角、俯仰角和偏航角的实时测量,与掘进工作面智能化监控系统实现数据通讯。
5)掘进工作面多机协同控制系统。通过在掘锚一体机、锚杆转载机组、桥式转载机上布置相对位置监测传感器,实时监测多机间的相对位置关系,为多机联动提供依据信号,实现多机间的协调联动,如图2所示。多机协同控制系统在保证掘进工作面“人-机-环境”安全条件下,能够为“掘锚一体机-锚杆转载机组-桥式转载机-带式输送机”提供多机启动过程、工作跟机过程、停机过程的协同控制信号,掘进作业线各设备接收到信号后,通过各控制系统完成多机启动功能、预留工作跟机过程功能、多机停机功能、多机联锁功能。
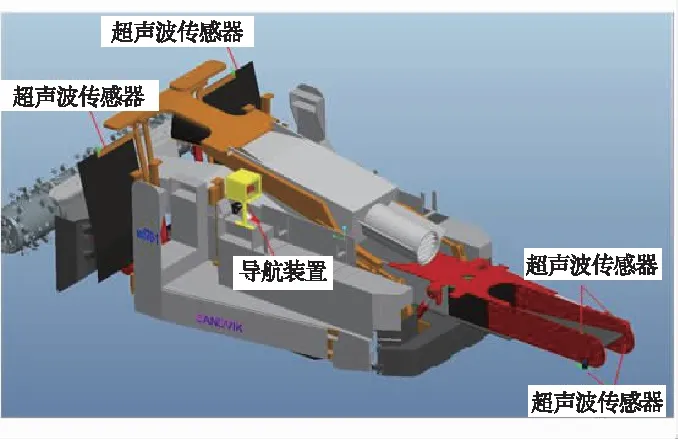
图2 掘进工作面多机协同控制系统
6)地面分控中心的构建。在地面分控中心配置交换机、工作站、显示器、操作台,实现地面对掘进工作面设备的远程监视和控制。现在地面分控中心对掘进工作面锚杆转载机组的油泵电机、运输机电机、桥式转载机、带式输送机一键启停控制。具备与掘进工作面远程监控操作台语音通话功能,对掘进工作面远程监控操作台及有关区域视频监视功能。
4 劳动组织及应用效果
4.1 快掘工作面的劳动组织情况
张家峁煤矿15212快掘工作面定员38人,辅助人员49人。劳动组织为“三八制”,八点班检修,四点、零点班生产,检修班定员9人,生产一班定员13人,生产二班定员13人。
4.1.1 掘进班组工作安排
1)检修班(即八点班):负责掘锚一体机等设备的检修、维护工作,负责工作面电路检查维护及电缆延伸工作,带式输送机检修、维护工作。
2)生产班(即零点、四点班):主要肩负掘进、支护等生产任务。
4.1.2 配备辅助工种工作安排
1)八点班:负责工作面风水管路及带式输送机延伸工作,负责井下风筒调平调直及延伸吊挂工作,负责全天工作面支护材料及设备配件运送入井工作,负责井下工作面标准化整理、巷道积水及沿线浮煤清理工作。
2)四点班:负责桥式转载机巡检工作,负责向工作面运输支护材料工作,负责工作面迎头浮煤清理工作。
3)零点班:负责桥式转载机巡检工作,负责向工作面运输支护材料工作,负责工作面迎头浮煤清理工作,负责在工作面储备次日延伸带式输送机及风水管路所需材料及配件。
为确保快掘系统正常有序生产,完成任务目标,优化现场劳动组织,提升现场管理水平,公司制定了详细的工作安排及激励奖罚政策,加大对区队的技术支持,提升区队的自主管理能力,区队根据公司相应的管理制度,积极制定适应现场实际的管理制度,以人为本,在发掘设备最大潜力的同时,积极提升区队管理水平。
4.2 现场应用效果
1)第一阶段——学习探索阶段:快速掘进设备刚步入掘进一队工作面,完全属于摸索阶段,通过设备安装、调试及试运转去学习,在学习的过程中发现问题,并解决问题,该阶段主要属于学习摸索及优化改进阶段,但是工作面未正式掘进。
2)第二阶段——设备升级阶段:通过设备优化后,单班最高进尺40m,单日最高进尺78m,当月累计进尺1530m。
3)第三阶段——优化应用阶段:智能快速掘进设备投入后,创造单班最高进尺65m,单日最高进尺120m,月累计进尺2700m,取得了中国快掘行业单班、单日及单月最高进尺。
5 结 论
张家峁煤矿针对矿井采掘生产衔接紧张难题,借助智能先进的掘锚一体机等设备,构建了智能快速掘进系统,并根据实际情况不断优化系统工艺,取得了显著成效,提升了智能化矿井的建设水平。
1)煤巷智能快速掘进技术实现了全断面快速掘进、巷道掘破支运平行作业、信息联动控制,代表了目前快速掘进系统在机械化、自动化、信息化领域的最高水平,是快速掘进技术类型的创新与发展。
2)张家峁煤矿智能快速掘进系统包括:掘进作业可视化系统、掘进设备、多机协同监控、安全生产、掘进工作面远程监控操作台、掘进工作面网络系统、掘进工作面视频监视系统、掘锚一体机组合导航系统、掘进工作面多机协同控制系统和地面分控中心的构建,实现张家峁煤矿的高质量快速掘进,缓解接续压力,保障千万吨产能。
猜你喜欢
河南科技(2023年23期)2024-01-16 10:17:16
石材(2020年7期)2020-08-24 08:28:04
冶金设备(2019年6期)2019-12-25 03:08:52
制造技术与机床(2019年11期)2019-12-04 05:49:50
建材与装饰(2018年41期)2018-10-11 08:09:20
电子测试(2018年14期)2018-09-26 06:04:10
华南理工大学学报(自然科学版)(2017年5期)2017-07-18 01:34:42
专用汽车(2016年4期)2016-03-01 04:14:17
橡胶工业(2015年6期)2015-07-29 09:20:32
橡胶工业(2015年2期)2015-07-29 08:29:56
