
基于OPC UA技术的物料搬运监控系统设计
2022-06-27 08:39石朝阳徐世许史世良
制造业自动化 2022年3期
石朝阳,徐世许,史世良
(青岛大学 自动化学院,青岛 266071)
0 引言
伴随着科技的不断进步,当今社会的自动化、信息化、生产力水平、经济水平也在不断提高,工业生产进入了一个新时代。物料的搬运工作始终是工业生产中不可或缺的一部分,企业也对物料的搬运提出了新的要求。例如:高效稳定,实时监控、低功耗、低成本等。考虑到企业的实际需求和工业设备的不断更新,选择了开放性、实时性较高的OPC UA协议作为通信标准,设计了物料搬运监控系统。该系统将OPC UA技术、NX运功控制器、SQL sever数据库紧密结合起来,代替了传统的搬运方式,不仅提高了物料搬运的可靠性,同时减少了工作人员的任务量和使用数量,降低了企业的人力成本。使用SQL sever数据库对箱体内物料信息进行及时的更新,保证箱体内实际物料信息与数据库内物料信息一致,有利于操作人员实时掌握箱体内的物料信息,使错误率大大降低,提高了工业自动化水平。
1 总体设计
物料搬运监控系统硬件主要有上位机、NX102-1200运动控制器、R88D-1SN08-ECT伺服驱动器、R88D-1M75030T-S2伺服电机、NX-ID5342输入模块等。系统上位机与NX运动控制器以OPC UA协议通信,上位机作为OPC UA客户端,NX运动控制器利用内置的OPC UA模块搭建OPC UA数据服务器。上位机监控软件在Visual Studio2019平台运用C#语言开发,利用OPC.Ua.Client类库创建实例化对象完成节点的读写及订阅操作[1]。当物料需要搬运时,上位机监控软件向下位机NX控制器发送源位置、目标位置、启动信号。下位机接收到启动信号后,由3个伺服电机组成的三轴机械手先运动至源位置将物料吸起,再运动至目标位置将物料放下。物料的吸取与释放由真空吸盘完成。在搬运的过程中,上位机监控软件实时读取NX运动控制器的状态及伺服电机的速度、位置、转矩等并显示在上位机监控界面上,实现实时监控。物料搬运完成后,上位机监控软件实时修改SQL sever数据库,提高系统的可追溯型,代替了人工记录,提高系统的自动化程度。传感器主要有光电开关、接近开关等,接近开关用于限位保护及电机零点设定,光电开关用于检测物料搬运过程中是否有脱落的情况。传感器、急停按钮、报警灯的使用是为了降低系统的故障率,提高系统的安全性。系统硬件结构如图1所示。
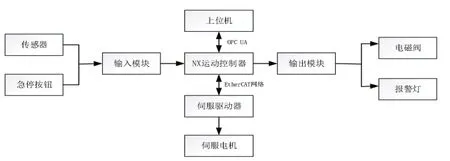
图1 系统硬件结构
2 控制系统设计
2.1 OPC UA通信
系统通过OPC UA协议完成上位机与NX运动控制器间的数据交互[2]。OPC UA是OPC基金会推出的一种新技术,与以往的OPC规范不同的是,OPC UA新增了跨平台能力且增强了命名空间的功能,解决了传统OPC技术的一些弊端。
2.1.1 OPC UA服务器设置
NX运动控制器内置了OPC UA通信模块,因此只需在NX运动控制器的开发环境Sysmac Studio进行简单的配置即可完成对OPC UA服务器的设置。首先打开OPC UA设置,将服务器功能设为“使用”状态,然后设置终点与端口号。点击在线可查看服务器证书,确保服务器证书在有效期范围内且终点与端口号设置无误后,将当前配置下载至NX运动控制器。OPC UA服务器配置界面如图2所示。
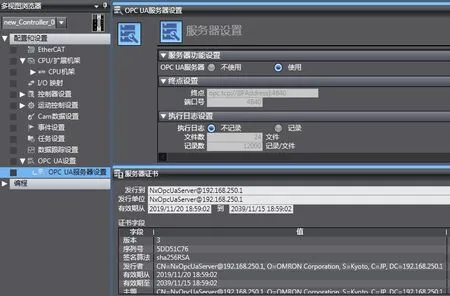
图2 OPC UA服务器配置
2.1.2 OPC UA客户端程序设计
OPC UA通信的数据读取方式共有三种:同步、异步、订阅。由于该系统需要通信的变量较多,且需要较高的通信效率,因此选用了异步通信的方式[3]。下面讲述如何通过OPC.UA.Client连接OPC UA服务器,且对服务器中的节点进行读写及订阅操作。
1)与OPC UA服务器连接。

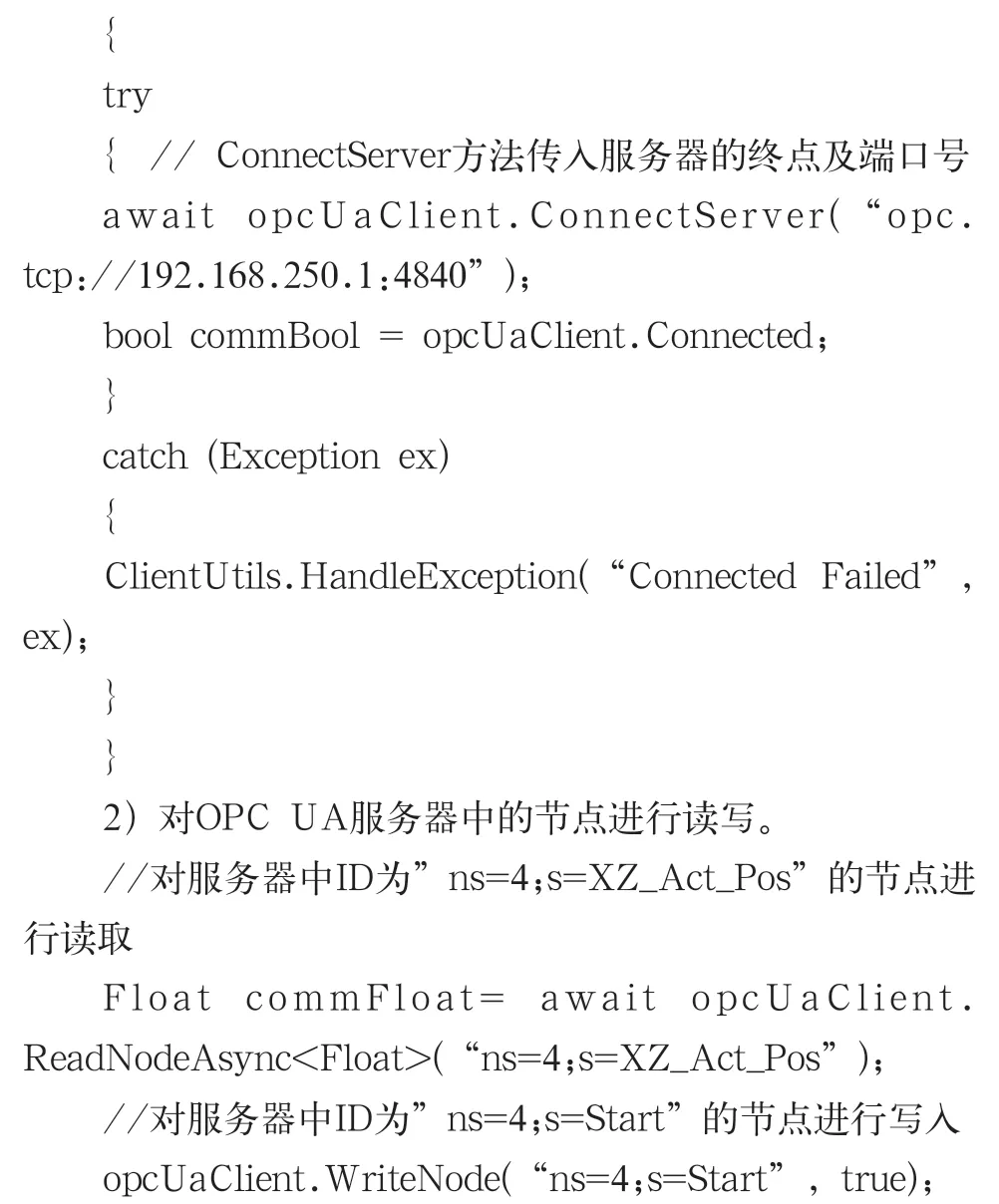
3)在物料进行搬运的过程中,上位机监控界面需要实时显示电机的位置、速度、转矩等数据,因此要使用节点订阅的方法批量订阅服务器中的节点。


在添加多节点订阅时,需要声明一个回调方法SubCallback,当服务器上被订阅的节点的值发生变化时就会产生通知,通知中包含的Value属性就是被订阅节点变化后的值。SubCallback方法如下

2.2 机械手运动控制设计
NX运动控制器控制由三个伺服电机组成的三轴机械手完成物料的搬运工作。上位机向NX运动控制器发送源位置、目标位置、启动信号。下位机收到启动信号后,利用多轴联动技术,机械手的XX轴和XY轴同时移动,移动至出料箱的源位置,到位后XZ下降到指定位置,通过真空吸盘对源位置的物料进行吸取。吸盘吸取500ms后XZ轴上升至零点位置,到位后机械手移动至接料箱的目标位置。到达目标位置后,XZ轴下降到指定位置将物料释放。释放完成后XZ轴再次回到零点位置,到位后就完成了物料的单次搬运。机械手的物料搬运流程如图3所示。

图3 机械手搬运流程
在物料搬运的过程中,由于机械振动很容易导致丢料现象。为避免此情况的发生,要调整好各轴速度、加速度、加加速度的关系,一般将比例调整为1∶2∶8的关系就可大幅度的减小机械振动。当然也可以通过使用欧姆龙封装好的振动抑制功能块来减小机械振动。除了调整好各轴速度、加速度、加加速度外,也要根据设备的运行环境、电机的应用场合调整机械刚性、惯量比、伺服PID参数等,使设备平稳安全的运行。
3 上位机监控软件设计
为让工作人员可以实时了解物料搬运情况及各轴电机的运行情况,设计了上位机监控软件。上位机监控软件在Visual Studio2019平台运用C#语言开发,利用OPC.Ua.Client类库创建实例化对象实现与NX运动控制器的OPC通信[4]。当物料需要搬运时,上位机监控软件向NX运动控制器发送待搬运物料的源位置、目的位置、启动信号,物料搬运过程中在各轴电机监控界面上实时显示各轴电机的速度、位置、转矩,物料搬运完成后修改SQL sever数据库,便于之后的查询与追溯,实现了控制与监视的紧密结合。
3.1 各轴电机运行情况监视
在物料搬运过程中,若速度、加速度、加加速度设定不合适很容易出现转矩过载的情况,长期如此会导致齿轮磨损严重,机械精度降低,因此在上位机监控软件中设计了各轴电机运行情况监视界面,可监视各轴电机的速度、位置、转矩等。伺服驱动器作为从站通过EtherCAT网络向主站NX运动控制器实时发送电机的实际速度、位置、坐标等信息,上位机监管软件作为OPC UA客户端订阅这些节点后便可在界面上实时显示。如图4所示,左侧为实物图,右侧为各轴电机运行情况监视图。
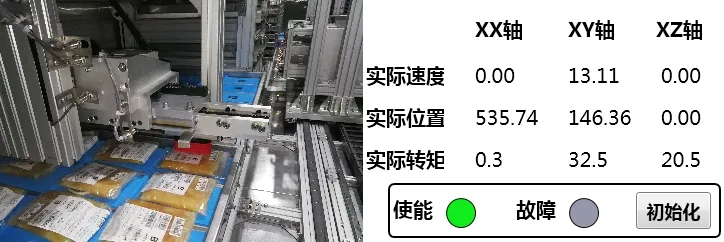
图4 实物及各轴电机运行情况监视界面
3.2 物料搬运情况监视
有些物料搬运环境是封闭式的,工作人员很难实时了解到物料的搬运情况,因此在上位机监控软件上设计了物料搬运监视界面。物料需要搬运时,会在监视界面上显示接料箱与出料箱的物料信息,物料搬运过程中,出料箱中的源位置与接料箱的目标位置会以虚框的形式显示,上位机监控软件会根据各轴电机的实际坐标显示出物料在监控界面上的相对位置,并且被搬运的物料会在监视界面中显示特殊颜色,物料搬运完成后使用二次封装的sqlHelper类库完成SQL sever数据库的修改,修改完成后使用DataGridView控件显示出接料箱与出料箱的物料搬运信息。物料搬运监视界面如图5所示。

图5 物料搬运监视界面
sqlHelper类库封装的是对数据库的一系列操作,封装的目的是降低代码的重复率。sqlHelper类库封装完成后,开发人员只需向类库中的方法传入一些参数即可完成对数据库的操作,节省了开发时间,提高了代码利用率。部分代码如下:


4 结语
针对箱体内物料的搬运问题,本文设计了基于OPC UA技术的物料搬运监控系统[5]。上位机监控软件在Visual Studio2019平台运用C#语言开发,代替了传统的组态软件。该系统将OPC UA技术与高级语言C#紧密结合起来,为运动控制提供了使用方案,不仅实现了功能的扩展,同时也降低了开发难度和开发成本。目前该系统已应用于实际工业生产线中,系统平稳运行,未来该系统还会不断更新,会基于OPC UA技术逐渐向云端发展,逐步成为更加智能、可靠、简单的系统。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
网络安全和信息化(2020年9期)2020-12-31
当代陕西(2020年13期)2020-08-24
网络安全和信息化(2020年7期)2020-08-07
上海建材(2020年12期)2020-04-13
流行色(2019年7期)2019-09-27
网络安全和信息化(2019年8期)2019-08-28
车迷(2018年12期)2018-07-26
山东工业技术(2016年15期)2016-12-01
网络空间安全(2016年3期)2016-06-15
