着陆架展开自缓冲气动作动器设计与研究
2022-06-27 09:55李光辉王金昌
导弹与航天运载技术 2022年3期
梁 赞,朱 炎,李光辉,王金昌,王 学
(1. 北京精密机电控制设备研究所,北京,100076;2. 中国运载火箭技术研究院,北京,100076)
0 引 言
着陆架收放作动器主要用于飞行器起落架的收放动作,对飞行器着陆起至关重要的作用。为避免着陆架展开到位时对着陆架结构和机上设备冲击力过大,着陆架展开作动器需在展开行程末端具有一定的缓冲能力。传统飞行器收放作动器广泛采用液压式和机电式。液压式和机电式均需通过复杂的阀控或控制驱动器完成上述功能,系统复杂。同时,作动器附加控制元件质量导致其功率密度大大降低。而对于气动作动器以高压惰性气体作为工作介质,其响应速度快,功率质量比大,尤其对于过程控制精度要求低的点对点的运动,结构及控制更加简单,成本低,无需复杂控制器,可靠性更高,使用维护更加方便。气动作动器被应用于某些特殊飞行器着陆架收放机构中。成都飞机工业(集团)有限责任公司和南京航空航天大学分别在某飞行器起落架和垂直起降运载器着陆支架收放系统中设计了气动收放作动器,但均通过入口节流和外部阀控实现收放速度调节,内部未设置缓冲结构。对于气动作动器缓冲的研究较多,研究成果主要集中在外置阀门进行控制或在作动器端盖或尾部内置节流结构。上述气动作动器缓冲结构额外增大了作动器尺寸、质量及控制复杂程度。
本文涉及飞行器着陆架起飞前通过人工手段收起即可,进入飞行着陆阶段后,着陆架需通过展开作动器快速放下。所述着陆架展开作动器需要在狭小空间内实现末端缓冲功能。同时,着陆架作动器在着陆架放下到位后,作动器输出力除抵抗外部载荷外,剩余输出力将全部作用在着陆架结构上,将成为着陆架结构的不利载荷,故其末端静态输出力要在能克服外部载荷的同时小于一定值。综合考虑上述特殊飞行器的着陆架只需快速完成展开动作的使用工况,行程末端缓冲,末端静态输出力控制以及体积和质量的要求,本文设计了一种着陆架展开自缓冲气动作动器。所设计作动器无需外挂附件,无需特殊控制,而是通过活塞杆内置带有节流孔的单向阀连通有杆腔和无杆腔,将无杆腔高压气体引流到有杆腔作为缓冲介质,实现作动器缓冲功能。同时,在作动器末端稳态时,通过压力均衡,控制末端静态输出力。活塞杆内置高压安全溢流阀用于限制缓冲背压上限,有助于优化作动器性能。本文将通过理论分析,仿真及试验验证方案的有效性。
1 着陆架展开自缓冲气动作动器结构原理
着陆架展开自缓冲气动作动器结构原理如图1 所示。其主要由缸筒、活塞杆、端盖、可调支耳、通气堵头、节流阀芯、复位弹簧、安全溢流阀等组成。
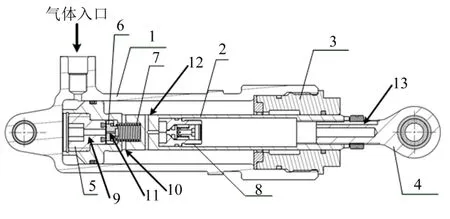
图1 着陆架展开自缓冲气动作动器结构示意Fig.1 Schematic of the Landing Gear Extension Self-buffering Pneumatic Actuator
着陆架展开自缓冲气动作动器通过通气孔1、节流单向阀和通气孔2 将有杆腔和无杆腔连通,在作动器无杆腔充入高压气体后,高压气体迅速进入有杆腔产生缓冲背压。节流单向阀由带小孔的节流阀芯和复位弹簧构成。当无杆腔压力高于有杆腔时,节流阀芯打开,无杆腔快速向有杆腔进气。随着有杆腔快速推进,活塞杆压缩有杆腔气体增压,有杆腔压力高于无杆腔时,节流阀芯关闭,节流阀芯上的节流孔实现气体向无杆腔的反向节流,提高了有杆腔建压压力和建压速度,实现缓冲功能。当达到稳态时,无杆腔和有杆腔压力平衡,总输出力将为活塞杆面积的输出力。为防止缓冲过程中,有杆腔建压过高,破坏作动器结构或造成作动器反弹,在活塞杆内部还内置了安全溢流阀,有杆腔内部压力过高时,有杆腔气体可通过此安全溢流阀排出。
2 着陆架展开自缓冲气动展开作器性能分析
2.1 静态输出力分析
静止状态下,以活塞杆组件为研究对象,其受力分析如图2 所示。
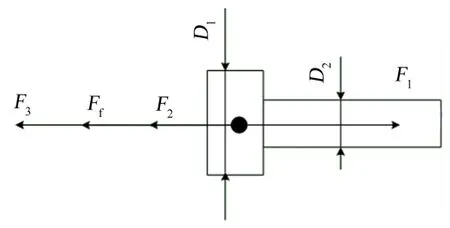
图2 着陆架展开作动器静态受力分析Fig.2 Static Force Analysis of the Actuator
作动器的输出力为

由于无杆腔和有杆腔是连通的,故在静止状态下,1等于,摩擦力为活塞杆静摩擦力,则:

由式(2)可知,本文所设计的作动器其静态输出推力只与输入压力、活塞杆直径 2以及摩擦力有关,与活塞直径无关。从而可以通过控制活塞杆直径来控制对外输出力。活塞直径设计将不会受输出力要求的限制,避免输出力上限要求较小时,活塞直径受限导致的活塞杆长径比较大,使活塞杆失稳。
2.2 动力学模型
为研究作动器在着陆架展开过程中的缓冲过程,以活塞杆和等效质量块为研究对象,建立了动力学模型,其受力分析如图3 所示。
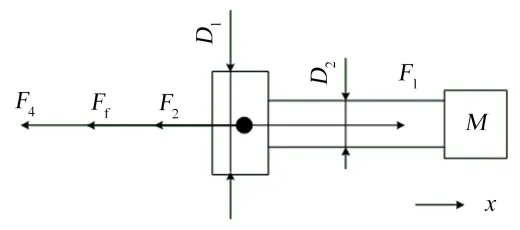
图3 着陆架展开自缓冲作动器动态受力分析Fig.3 Dynamic Analysis of the Landing Gear Extension Self-buffering Pneumatic Actuator
其所受作用力包括无杆腔压力对活塞杆的作用力,有杆腔压力对活塞的作用力,摩擦力以及等效质量块所受外界的负载力,根据牛顿第二定律所构建作动器动力学方程:

式中为等效质量块质量,单位kg;为活塞杆位移;为摩擦力,单位N;为等效质量块所受外载荷,单位N。
作动器运动过程中,作动器摩擦力具有很强的非线性特性,难以建立一个准确的作动器摩擦力计算模型。在此,文献[9]和文献[10]中的摩擦力计算模型,如式(4)、式(5):
式中为库伦摩擦力,单位N;为粘性摩擦系数,单位(N·s)/m;为压差影响系数,单位m。作动器运动过程中的库伦摩擦力、粘性摩擦系数、压差影响系数由文献[10]中介绍的试验方法进行曲线拟合得到。
2.3 作动器动态仿真
为更好地分析所设计的着陆架展开气动作动器末端缓冲过程,基于上述动力学模型,利用AMESim 对其进行了动态仿真。表2 为所设计的某飞行器新型着陆架展开自缓冲气动作动器参数表。
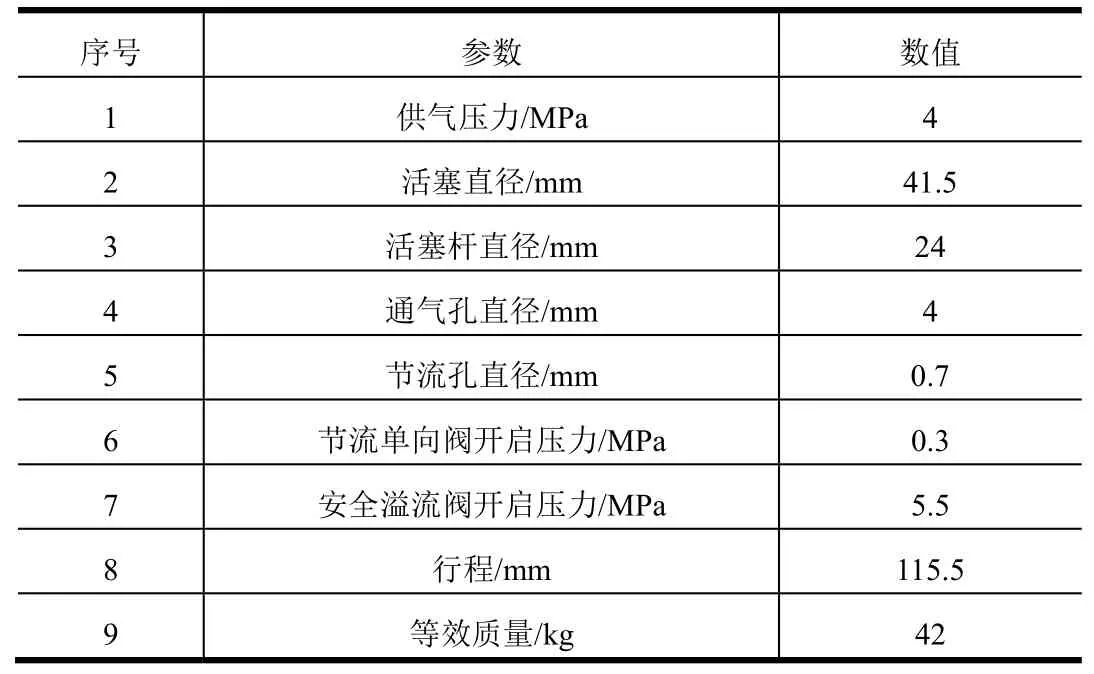
表2 某型号着陆架展开气动作动器参数Tab.2 The Parameters of the Pneumatic Actuator
着陆架收放作动器的AMESim 仿真模型如图4 所示。为研究作动器本身特性,暂不增加外部气动载荷。仿真时,采用气瓶+节流阀+减压阀+电磁作为供气单元驱动作动器运动,供气压力为4 MPa,摩擦力通过函数(,,)添加,(,,)为关于质量块速度、活塞两端压力的函数,函数如式(4)所示。着陆架展开作动器作动过程的时间-位移曲线,时间-压力曲线,时间-力曲线,如图5 所示。
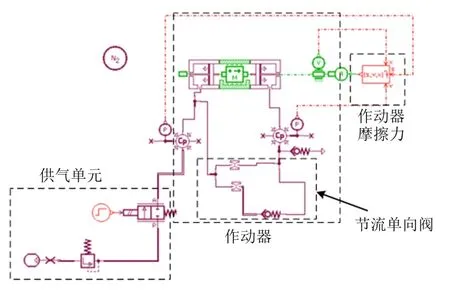
图4 着陆架展开作动器仿真模型Fig.4 Simulation Model of the Actuator
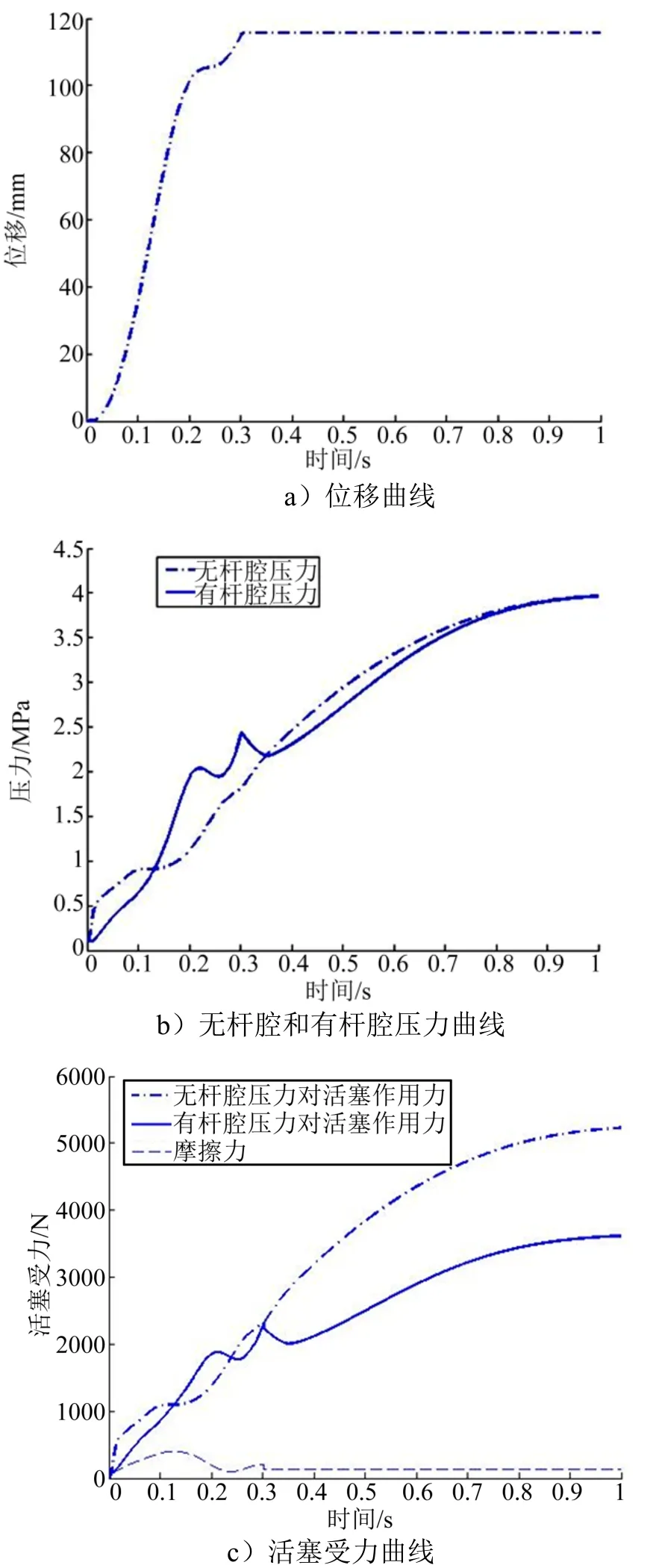
图5 着陆架展开作动器动态响应仿真曲线Fig.5 Simulation Curve of Dynamic Response of the Actuator
由图5a 时间-位移曲线可知,所设计作动器在其运动后期位移斜率降低,即速度放缓,说明作动器具有缓冲效果,全行程作动时间约0.3 s。由于气体的可压缩性,在缓冲段,有杆腔压力会发生大幅度波动,从而导致活塞杆速度在缓冲段发生振荡。
由图5b 时间-无杆腔和有杆腔压力曲线可知,在无杆腔开始建压后,有杆腔也开始迅速建压。虽其有杆腔气体为引流无杆腔气体,但有杆腔气体在活塞高速作动过程中被压缩,动能转化为气体的压力势能,故有杆腔建压速度比无杆腔建压速度快。在0.13 s 左右有杆腔压力将大于无杆腔压力。由于气体的可压缩性,有杆腔压力在活塞杆缓冲阶段也发生振动,待作动器作动完成后,有杆腔和无杆腔压力将逐渐升压至充气压力4 MPa。安全溢流阀开启压力设置为5.5 MPa,溢流阀未开启。
由图5c 可知,随着有杆腔压力的升高,有杆腔压力对活塞的作用力也随着升高,并在0.15 s 左右,有杆腔对活塞的作用力大于无杆腔对活塞作用力,活塞杆开始进入缓冲阶段。有杆腔和无杆腔对活塞作用力变化趋势与有杆腔和无杆腔压力变化趋势基本相同,但无杆腔压力作用面积大于有杆腔压力作用面积,最终无杆腔压力对活塞作用力将大于有杆腔对活塞作用力,无杆腔压力对活塞作用力稳态值约为5420 N,有杆腔对活塞作用力稳态值约为3609 N。如图5c 所示,活塞所受摩擦力随作动器运动速度增大而增大,最终活塞所有摩擦力为静态摩擦力,其变化趋势符合物理规律。作动器静态输出力约为稳态时无杆腔压力对活塞作用力与有杆腔压力对活塞作用力及摩擦力的差值。
3 试验验证
为验证理论分析及仿真的有效性,搭建了着陆架展开作动器综合试验台对作动器的各项静态和动态参数进行采集和分析。本试验中,被测产品结构参数与上述仿真参数一致。
3.1 静态输出力测试
通过加载液压作动器将被测着陆架展开作动器固定至其全伸出行程末端,将力传感器置于加载液压作动器和被测着陆架展开作动器之间,如图6 所示。被测产品通过进气口充入4 MPa 氮气,读取力传感器值即为着陆架展开作动器静态输出力值。
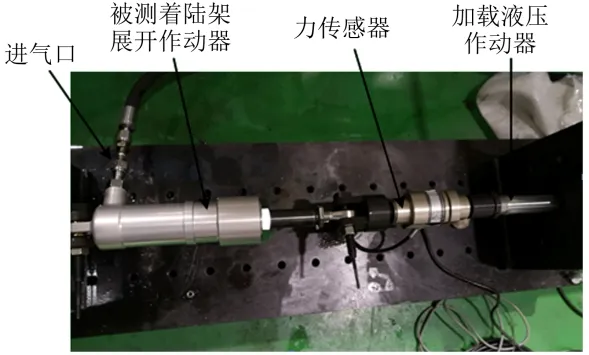
图6 静态输出力试验Fig.6 Static Output Force Test
由式(2)可知,在不考虑摩擦力时,着陆架展开作动器静态输出力为

在试验中,加载液压缸锁定使被试产品处于静止状态,向被测着陆架展开作动器通入4 MPa 氮气,读取其输出推力约1690 N。由于静摩擦力的存在,试验值略低于式(6)计算值,符合理论分析和仿真结果。此时静摩擦力即为式(6)计算值与试验值的差值,约为118.64 N。
3.2 动态特性测试
图7将被测着陆架展开作动器与位移传感器并联,作动器一端固定一端与配重相连,配重及活塞杆质量约为42 kg。作动器进气口安装有压力传感器用于检测无杆腔压力。将作动器压缩到最短位置,气源压力设置为4 MPa,被测着陆架收放作动器入口通过电磁阀控制气源的开启,从而获取被测着陆架展开作动器的动态曲线。其时间-位移和时间-入口压力曲线如图8所示。由于产品结构约束,未能在有杆腔设置压力测试接口,试验中未能获得时间-有杆腔压力曲线。
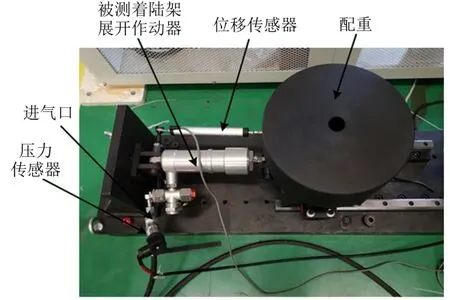
图7 动态性能试验Fig.7 Dynamic Performance Test
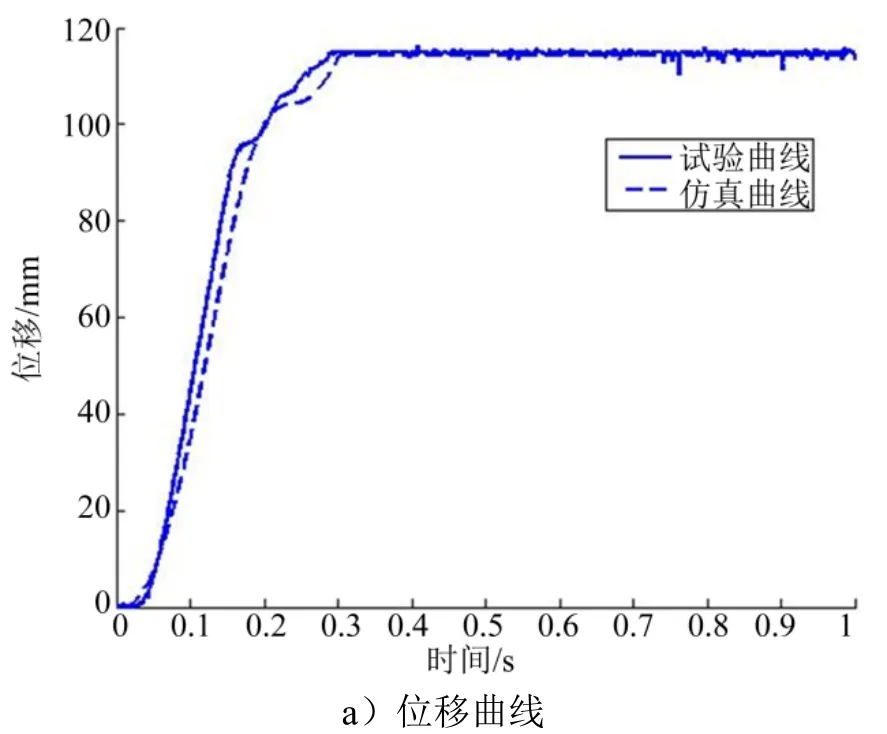
图8 着陆架展开自缓冲气动作动器的动态曲线Fig.8 Dynamic Curve of the Landing Gear Extension Self-buffering Pneumatic Actuator
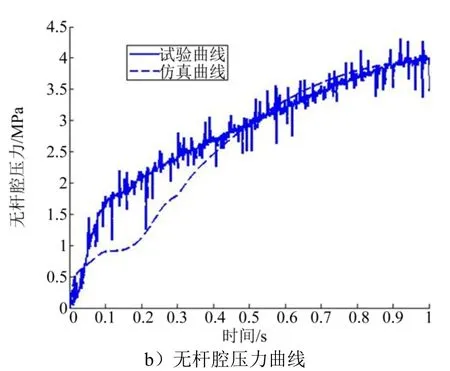
续图8
由图8 可知,活塞杆运动过程的试验结果与仿真结果趋势基本一致,通过图8a 时间-位移曲线可知,作动器行程末端具有缓冲效果,但试验结果与仿真结果还存在一定的差别。造成差别的主要原因在于:供气单元涉及元件较多,仿真模型无法完全模拟,其对无杆腔建压有一定影响,如图8b 所示,其仿真的无杆腔建压压力比实际测量的建压压力略低,有杆腔建压也会略慢,故导致位移曲线进入缓冲时刻略晚;实际节流单向阀与理论模型存在差异;同时作动器动态过程中,摩擦力具有较强的非线性特性,而仿真模型中采用了简化的数学模型。虽然仿真结果与试验结果有一定的差异,但通过仿真结果可有效反映出新设计产品的运动趋势,并证明设计的有效性。
4 结束语
本文针对某特殊飞行器的特殊需求,设计了一种着陆架展开自缓冲气动作动器,对其结构原理进行了说明并对其静态输出力和缓冲过程进行了理论和仿真分析。通过结构原理可知,其结构简单,集成度高,充分利用活塞杆内部空间进行结构设计,有效减小了作动器体积和质量,无需外挂控制元件和控制气路即可实现作动器末端缓冲和输出推力的变化。通过理论和仿真分析可知,静态输出力主要与活塞杆直径有关和摩擦力有关与活塞直径无关。作动器位移的试验结果与仿真结果趋势较为吻合,由于供气单元涉及元件较多,仿真模型无法完全模拟,动态过程中,摩擦力较为复杂,实际节流单向阀与理论模型存在差异,故试验结果与仿真结果还有一定偏差。在后续研究中将继续修正仿真模型,提高模型的准确性,用于指导产品参数的匹配和优化,使产品在不同工况下达到最优性能。